Clear Sky Science · it
Algoritmo di rilevamento di bersagli navali a infrarossi PEW_YOLOv8 in ambienti complessi
Osservare le navi al buio
Le rotte marittime moderne sono affollate e trafficate, e molte imbarcazioni si affidano ora a telecamere a infrarossi per sorvegliare di notte e in condizioni avverse. Ma trasformare quelle immagini termiche sfocate in avvisi affidabili è più difficile di quanto sembri: le navi distanti possono apparire come piccole macchie, la foschia marina sfuma la scena e luci intense o onde possono ingannare il software. Questo articolo presenta PEW_YOLOv8, un nuovo metodo di visione artificiale progettato per individuare le navi nei video a infrarossi con maggiore accuratezza, anche quando la visuale è torbida o piena di elementi di disturbo.
Perché è così difficile individuare le navi
Il rilevamento di navi a infrarossi mira a trovare automaticamente le imbarcazioni nelle immagini basandosi sulle loro firme termiche invece che sulla luce visibile. Questo è interessante perché le telecamere a infrarossi funzionano giorno e notte e in molte condizioni difficili. Tuttavia, le immagini che producono sono spesso povere di dettagli e contrasto. L’umidità dell’aria marina può provocare foschia e sfocatura, facendo apparire le navi sbavate o sbiadite. Le imbarcazioni piccole e lontane possono occupare solo poche decine di pixel, quindi gli algoritmi standard le trascurano. Quando onde, banchine o luci cittadine creano uno sfondo ricco di elementi, i sistemi più vecchi possono confondere questi pattern con veri bersagli, aumentando i falsi allarmi o perdendo minacce reali.
Basarsi su strumenti di visione rapida
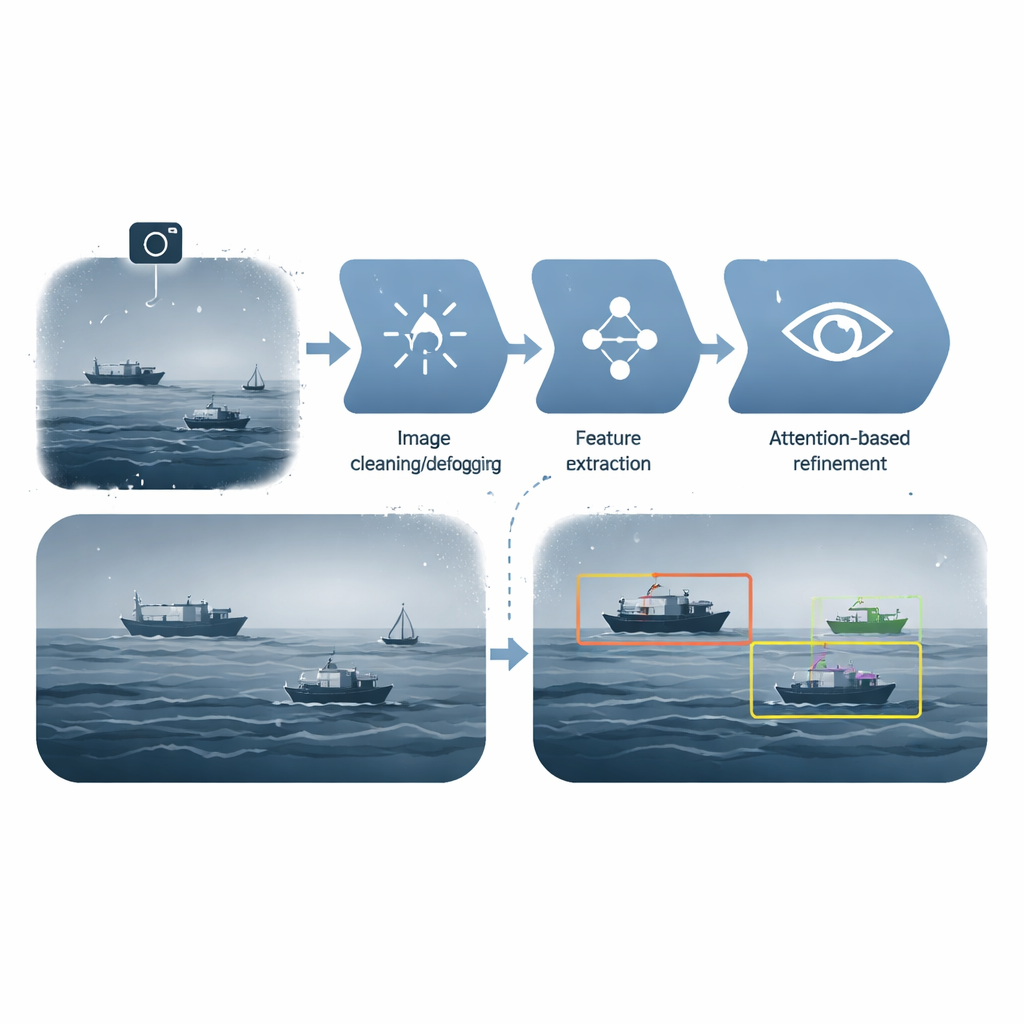
Gli autori partono da YOLOv8, un sistema di deep learning molto usato che può identificare molti tipi di oggetti in tempo reale. YOLOv8 è veloce, ma nelle immagini infrarosse grezze per il rilevamento navale fatica ancora con scene rumorose, bersagli sovrapposti e imbarcazioni di piccole dimensioni. Per affrontare questi problemi, i ricercatori introducono quattro migliorie chiave che insieme costituiscono PEW_YOLOv8. Ogni miglioramento si concentra su un punto debole distinto della pipeline originale: pulire l’immagine in ingresso, estrarre dettagli più ricchi, combinare in modo intelligente le informazioni a diverse scale e valutare con più cura le box di rilevamento quando le navi si sovrappongono o i contorni sono sfumati.
Chiarire la vista e trovare dettagli fini
Il primo miglioramento è un modulo di defogging chiamato FFA-Net. Prima che il rilevatore principale analizzi l’immagine, FFA-Net migliora il contrasto e ripristina dettagli persi prestando attenzione sia alle intere canalizzazioni informative sia ai singoli pixel. In pratica, schiarisce la foschia in modo che la rete a valle abbia dati più nitidi su cui lavorare. Seguendo questo, viene riprogettata la “backbone” per l’estrazione delle caratteristiche, nota come PGIG-Backbone. Questa struttura guida il flusso delle informazioni e l’aggiornamento dei segnali interni della rete. Gestendo con cura i gradienti e fondendo segnali da percorsi multipli, diventa più efficace nel rappresentare bersagli navali piccoli e a bassa risoluzione che i progetti standard tendono a trascurare.

Permettere alla rete di focalizzarsi e di giudicare meglio
Oltre a immagini più chiare e a una backbone più robusta, PEW_YOLOv8 aggiunge un modulo di attenzione multi-scala efficiente nel cuore della rete. Questo componente pesa diverse regioni e livelli delle mappe di caratteristiche, rafforzando i pattern che somigliano a navi mentre attenua il rumore di fondo come onde o banchine. Infine, gli autori sostituiscono il metodo usuale di valutazione delle bounding box con una tecnica chiamata Wise-IoU v3. Invece di essere eccessivamente influenzata da pochi esempi problematici, questa funzione di perdita regola quanto apprendere da ogni caso, il che aiuta il sistema a gestire navi sovrapposte e contorni poco chiari senza diventare instabile.
Cosa mostrano i test
Il team valuta il proprio metodo su un dataset industriale di navi a infrarossi contenente 9.400 immagini provenienti da scenari reali di difesa costiera, inclusi mare aperto, porti e acque costiere, e sette tipi di navi, da canoe a grandi portacontainer. Confrontano PEW_YOLOv8 con l’YOLOv8 originale e con diversi altri rilevatori diffusi. Ogni modulo aggiunto — il defogging, la backbone migliorata, il meccanismo di attenzione e la nuova funzione di perdita — incrementa l’accuratezza di una quantità misurabile. Quando combinati, questi cambiamenti portano il punteggio principale di rilevamento al 92,2 percento, un miglioramento di quasi quattro punti percentuali rispetto alla YOLOv8 di base, mantenendo al contempo la velocità di elaborazione adatta al monitoraggio in tempo reale.
Avvisi più chiari in mare aperto
In termini semplici, questo lavoro dimostra come miglioramenti accuratamente calibrati possano trasformare immagini navali infrarosse rumorose in avvisi automatici molto più affidabili. Pulendo prima l’immagine, poi estraendo dettagli più ricchi, concentrandosi sulle regioni probabilmente occupate dalle navi e prendendo decisioni più intelligenti sui bersagli sovrapposti, PEW_YOLOv8 vede più imbarcazioni e commette meno errori rispetto ai sistemi precedenti. Con ulteriori perfezionamenti per scene molto affollate e un’elaborazione ancora più rapida, approcci come questo potrebbero contribuire a rendere il traffico marittimo più sicuro, specialmente di notte e in condizioni difficili in cui gli occhi umani e le telecamere tradizionali tendono a fallire.
Citazione: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Parole chiave: rilevamento navi a infrarossi, sorveglianza marittima, rilevamento oggetti, deep learning, YOLOv8