Clear Sky Science · ru
Алгоритм обнаружения целей-кораблей в инфракрасном диапазоне PEW_YOLOv8 в сложных условиях
Наблюдение за кораблями в темноте
Современные судоходные трассы густонаселены и загружены, и многие суда используют инфракрасные камеры для наблюдения ночью и в плохую погоду. Превратить эти размытые тепловые изображения в надежные предупреждения сложнее, чем кажется: далёкие суда могут выглядеть как крошечные пятна, морской туман размывает картину, а яркие источники света или волны вводят ПО в заблуждение. В статье представлен PEW_YOLOv8 — новый метод компьютерного зрения, разработанный для более точного обнаружения кораблей на инфракрасных видео, даже когда изображение зашумлено или загромождено.
Почему обнаружение кораблей так проблематично
Инфракрасное обнаружение кораблей стремится автоматически находить суда на изображениях по их тепловым подписи, а не по видимому свету. Это привлекательно, потому что инфракрасные камеры работают днем и ночью и в многих суровых условиях. Однако получаемые ими изображения часто бедны деталями и контрастом. Влажный морской воздух вызывает запотевание и размытость, из‑за чего корабли выглядят смазанными или выцветшими. Небольшие и дальние лодки могут занимать лишь несколько пикселей, поэтому стандартные алгоритмы их пропускают. Когда волны, причалы или городские огни создают загруженный фон, старые системы путают эти структуры с настоящими целями, что приводит к ложным тревогам или пропускам реальных объектов.
Опора на быстрые инструменты компьютерного зрения
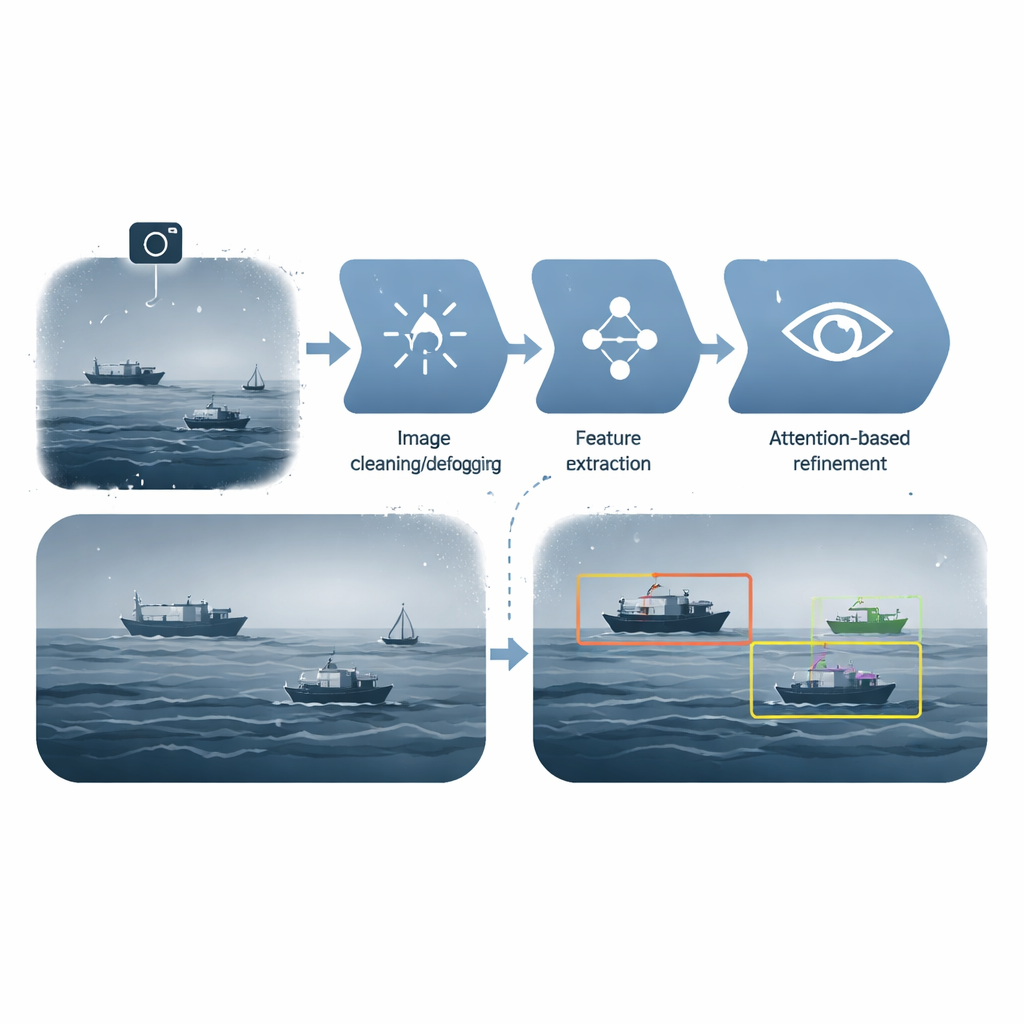
Авторы берут за основу YOLOv8 — широко используемую систему глубокого обучения, способную в реальном времени распознавать разные классы объектов. YOLOv8 быстр, но на «сырых» инфракрасных изображениях он всё ещё испытывает трудности с зашумлёнными сценами, перекрывающимися целями и крошечными судами. Чтобы решить эти проблемы, исследователи вводят четыре ключевых улучшения, которые вместе составляют PEW_YOLOv8. Каждое улучшение устраняет отдельную слабую сторону исходного конвейера: очистку входного изображения, извлечение более богатых признаков, разумное объединение информации на разных масштабах и более точную оценку рамок обнаружения при перекрытии или размытых контурах кораблей.
Очищение изображения и поиск тонких деталей
Первое улучшение — модуль удаления тумана FFA-Net. Прежде чем основной детектор приступит к анализу, FFA-Net повышает контраст и восстанавливает утерянные детали, учитывая как целые каналы информации, так и отдельные пиксели. По сути, он расчищает дымку, давая последующей сети более четкие данные. Затем следует переработанный «бекбон» для извлечения признаков, названный PGIG-Backbone. Эта структура управляет потоком информации и обновлением внутренних сигналов сети. Тщательно контролируя градиенты и объединяя сигналы из нескольких путей, она лучше представляет маленькие низкорезолюционные цели, которые стандартные архитектуры склонны пропускать.

Фокусировка сети и более взвешенная оценка
Помимо очистки изображения и усиленного бекбона, PEW_YOLOv8 добавляет эффективный многомасштабный модуль внимания в середине сети. Этот компонент взвешивает разные регионы и уровни карт признаков, усиливая шаблоны, похожие на корабли, и ослабляя фоновые помехи, такие как волны или причалы. Наконец, авторы заменяют привычный способ оценки ограничивающих рамок методом Wise-IoU v3. Вместо того чтобы слишком сильно оглядываться на несколько проблемных примеров, эта функция потерь регулирует силу обучения на разных случаях, что помогает системе справляться с перекрывающимися судами и неясными границами, не становясь нестабильной.
Результаты испытаний
Команда оценивает свой метод на промышленном инфракрасном наборе данных по обнаружению кораблей, содержащем 9400 изображений из реальных прибрежных сценариев, включая открытое море, порты и прибрежные воды, и семь типов судов — от каноэ до крупных контейнеровозов. Они сравнивают PEW_YOLOv8 с исходным YOLOv8 и несколькими другими популярными детекторами. Каждый добавленный модуль — удаление тумана, улучшённый бекбон, механизм внимания и новая функция потерь — повышает точность на измеримую величину. В совокупности эти изменения повышают основной показатель обнаружения до 92,2 процента, что почти на четыре процентных пункта выше базового YOLOv8, при этом сохраняя скорость обработки, подходящую для мониторинга в реальном времени.
Более надёжные предупреждения в открытом море
Проще говоря, работа показывает, как тщательно подобранные улучшения могут преобразовать зашумлённые инфракрасные изображения кораблей в гораздо более надёжные автоматические оповещения. Сначала очищая изображение, затем извлекая более богатые признаки, фокусируясь на вероятных областях с кораблями и принимая более взвешенные решения при перекрытиях целей, PEW_YOLOv8 обнаруживает больше судов и делает меньше ошибок по сравнению с ранними системами. С дальнейшей доработкой для сильно загруженных сцен и ещё более быстрой обработкой подобные подходы могли бы повысить безопасность морского движения, особенно ночью и в тяжёлых условиях, где человеческий глаз и традиционные камеры чаще всего дают сбой.
Цитирование: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Ключевые слова: инфракрасное обнаружение кораблей, морской мониторинг, обнаружение объектов, глубокое обучение, YOLOv8