Clear Sky Science · pl
Algorytm wykrywania statków na podczerwień PEW_YOLOv8 w złożonych środowiskach
Obserwacja statków po zmroku
Współczesne szlaki żeglugowe są zatłoczone i intensywnie eksploatowane, a wiele jednostek korzysta teraz z kamer na podczerwień do obserwacji nocą i w złych warunkach pogodowych. Jednak przekształcenie tych nieostrych obrazów cieplnych w wiarygodne ostrzeżenia jest trudniejsze, niż się wydaje: odległe łodzie mogą być maleńkimi smugami, morska mgła rozmywa scenę, a silne światła czy fale potrafią zmylić oprogramowanie. W artykule przedstawiono PEW_YOLOv8, nową metodę widzenia komputerowego zaprojektowaną do dokładniejszego wykrywania statków w materiałach wideo z podczerwieni, nawet gdy obraz jest zamglony lub zagracony.
Dlaczego wykrywanie statków jest tak trudne
Detekcja statków w podczerwieni ma na celu automatyczne odnajdywanie jednostek na podstawie ich sygnatur cieplnych zamiast światła widzialnego. To rozwiązanie jest atrakcyjne, ponieważ kamery na podczerwień działają w dzień i w nocy oraz w wielu trudnych warunkach. Obrazy, które generują, często jednak mają niską szczegółowość i kontrast. Wilgotne powietrze nad morzem może powodować zamglenie i rozmycie, przez co statki wydają się rozmazane lub wyprane z detali. Małe i odległe jednostki mogą zajmować tylko kilka pikseli, więc standardowe algorytmy je pomijają. Gdy tło zakłócają fale, nabrzeża lub miejskie światła, starsze systemy mogą mylić te wzory z prawdziwymi celami, zwiększając liczbę fałszywych alarmów lub przeoczeń.
W oparciu o szybkie narzędzia wizyjne
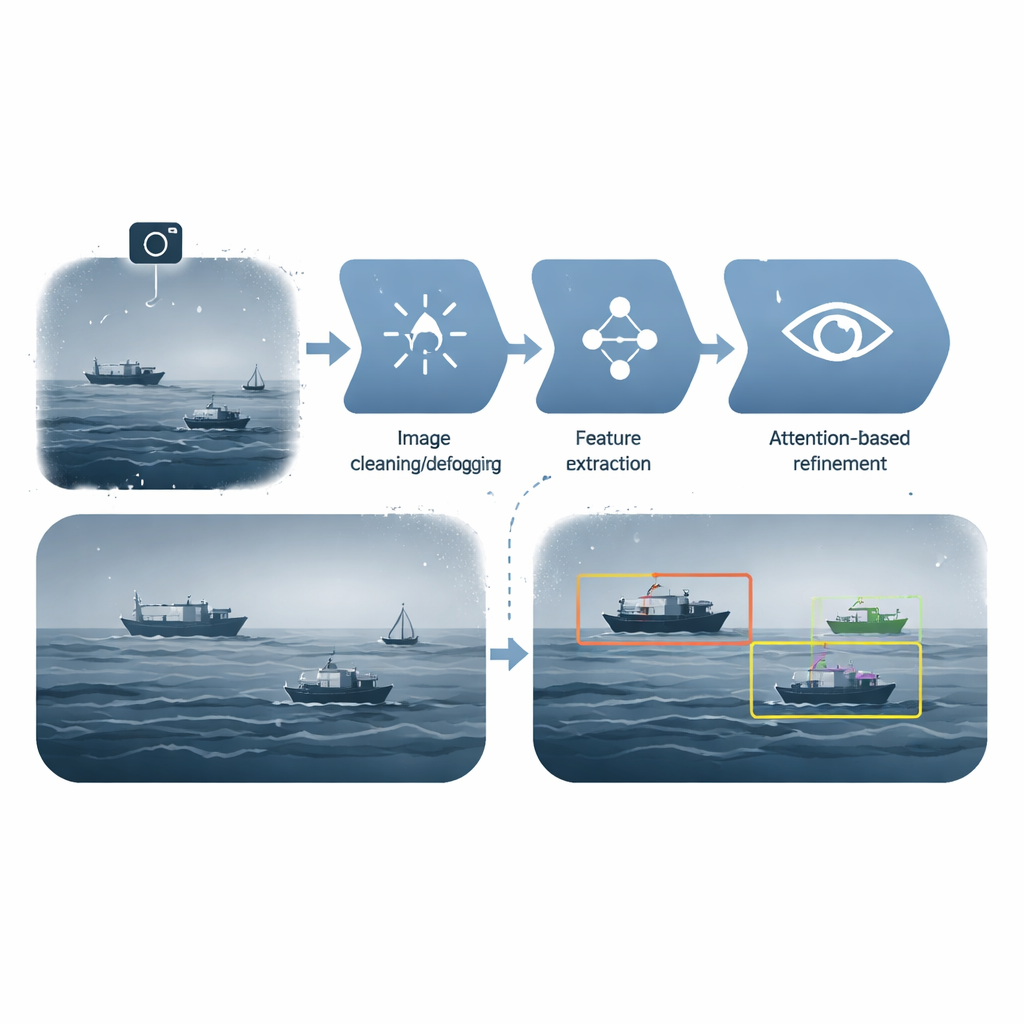
Autorzy zaczynają od YOLOv8, szeroko stosowanego systemu uczenia głębokiego zdolnego do identyfikacji wielu typów obiektów w czasie rzeczywistym. YOLOv8 jest szybki, ale na surowych obrazach w podczerwieni wciąż ma problemy z zaszumionymi scenami, nakładającymi się celami i drobnymi jednostkami. Aby temu zaradzić, badacze wprowadzają cztery kluczowe ulepszenia, które razem tworzą PEW_YOLOv8. Każde ulepszenie koncentruje się na innym słabym punkcie oryginalnego potoku: oczyszczaniu obrazu wejściowego, wydobywaniu bogatszych detali, inteligentnym łączeniu informacji na różnych skalach oraz dokładniejszej ocenie ramek wykryć, gdy statki nachodzą na siebie lub ich kontury są nieostre.
Oczyszczanie obrazu i wyszukiwanie drobnych detali
Pierwsze ulepszenie to moduł odmgławiania o nazwie FFA-Net. Zanim główny detektor zajrzy do obrazu, FFA-Net poprawia kontrast i przywraca utracone detale, zwracając uwagę zarówno na całe kanały informacji, jak i na poszczególne piksele. W praktyce oczyszcza to mgłę, dzięki czemu sieć dalszego przetwarzania otrzymuje ostrzejsze dane. Następnie wprowadzono przeprojektowany „backbone” do ekstrakcji cech, nazwany PGIG-Backbone. Ta struktura kieruje przepływem informacji i aktualizacją wewnętrznych sygnałów sieci. Poprzez staranne zarządzanie gradientami i łączenie sygnałów z wielu ścieżek staje się ona lepsza w reprezentowaniu małych, niskorozdzielczych celów, które standardowe konstrukcje mają tendencję pomijać.

Pozwolenie sieci skupić się i lepiej oceniać
Ponad wyraźniejszym obrazem i silniejszym „backbone”, PEW_YOLOv8 dodaje efektywny moduł uwagi wieloskalowej umieszczony w środku sieci. Ten komponent waży różne regiony i warstwy map cech, wzmacniając wzorce przypominające statki, a jednocześnie tłumiąc zakłócenia tła, takie jak fale czy nabrzeża. Wreszcie autorzy zastępują zwykły sposób oceniania ramek wykryć metodą o nazwie Wise-IoU v3. Zamiast być nadmiernie wpływanym przez kilka problematycznych przykładów, ta funkcja straty dostosowuje, jak silnie uczy się z różnych przypadków, co pomaga systemowi radzić sobie z nachodzącymi na siebie jednostkami i niejasnymi granicami bez popadania w niestabilność.
Co pokazują testy
Zespół ocenił swoją metodę na przemysłowym zbiorze danych obrazów statków w podczerwieni zawierającym 9 400 zdjęć z rzeczywistych scen obrony wybrzeża, obejmujących morze otwarte, porty i wody przybrzeżne oraz siedem typów jednostek — od kajaków po duże kontenerowce. Porównali PEW_YOLOv8 z oryginalnym YOLOv8 i kilkoma innymi popularnymi detektorami. Każdy dodany moduł — odmgławianie, ulepszony backbone, mechanizm uwagi i nowa funkcja straty — podnosi dokładność o mierzalną wartość. W połączeniu te zmiany podnoszą główny wynik detekcji do 92,2 procent, co stanowi poprawę prawie o cztery punkty procentowe w stosunku do bazowego YOLOv8, przy zachowaniu prędkości przetwarzania odpowiedniej dla monitoringu w czasie rzeczywistym.
Wyraźniejsze ostrzeżenia na otwartym morzu
Mówiąc prosto, praca ta pokazuje, jak starannie dobrane ulepszenia mogą przekształcić zaszumione obrazy statków w podczerwieni w znacznie bardziej wiarygodne automatyczne alarmy. Poprzez najpierw oczyszczenie obrazu, następnie wydobycie bogatszych detali, skupienie się na prawdopodobnych regionach statków i podejmowanie mądrzejszych decyzji dotyczących nachodzących na siebie celów, PEW_YOLOv8 wykrywa więcej jednostek i popełnia mniej błędów niż wcześniejsze systemy. Przy dalszym dopracowaniu dla silnie zatłoczonych scen i jeszcze szybszym przetwarzaniu podejścia takie jak to mogą przyczynić się do zwiększenia bezpieczeństwa żeglugi, szczególnie nocą i w trudnych warunkach, kiedy wzrok ludzki i tradycyjne kamery zawodzą najczęściej.
Cytowanie: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Słowa kluczowe: detekcja statków w podczerwieni, nadzór morski, detekcja obiektów, uczenie głębokie, YOLOv8