Clear Sky Science · pt
Algoritmo de detecção de alvos de navios por infravermelho PEW_YOLOv8 em ambientes complexos
Observando navios no escuro
As rotas de navegação modernas estão movimentadas e muitos embarques hoje dependem de câmeras infravermelhas para vigiar à noite e em condições adversas. Mas transformar essas imagens térmicas borradas em alertas confiáveis é mais difícil do que parece: embarcações distantes podem ser pequenas manchas, a névoa marítima desfoca a cena, e luzes fortes ou ondas podem enganar o software. Este artigo apresenta o PEW_YOLOv8, um novo método de visão computacional projetado para detectar navios em vídeos infravermelhos com maior precisão, mesmo quando a visualização é turva ou carregada de ruído.
Por que detectar navios é tão difícil
A detecção de navios por infravermelho busca localizar automaticamente embarcações em imagens com base em suas assinaturas térmicas, em vez da luz visível. Isso é atraente porque câmeras infravermelhas funcionam dia e noite e em muitas condições adversas. No entanto, as imagens que produzem costumam ter baixo nível de detalhe e contraste. O ar úmido sobre o mar pode causar neblina e borrão, fazendo com que navios pareçam borrados ou esmaecidos. Barcos pequenos e distantes podem ocupar apenas alguns pixels, de modo que algoritmos padrão os ignoram. Quando ondas, docas ou luzes da cidade criam fundos carregados, sistemas antigos podem confundir esses padrões com alvos reais, aumentando alarmes falsos ou deixando de detectar ameaças por completo.
Baseando-se em ferramentas de visão rápidas
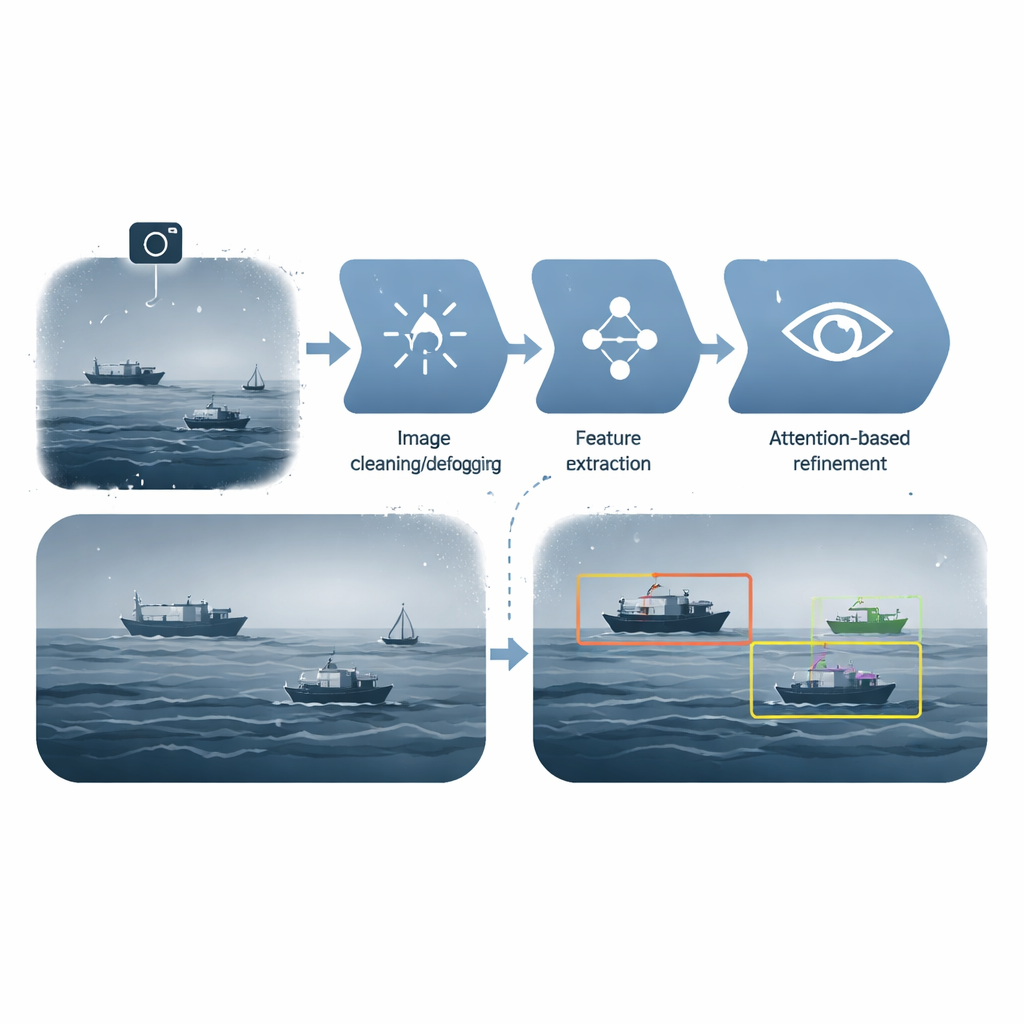
Os autores partem do YOLOv8, um sistema de aprendizado profundo amplamente usado que pode identificar muitos tipos de objetos em tempo real. O YOLOv8 é rápido, mas em imagens infravermelhas brutas de navios ainda tem dificuldades com cenas ruidosas, alvos sobrepostos e embarcações minúsculas. Para enfrentar isso, os pesquisadores introduzem quatro melhorias principais que, juntas, formam o PEW_YOLOv8. Cada melhoria foca em uma fragilidade diferente do pipeline original: limpar a imagem de entrada, extrair detalhes mais ricos, combinar informações entre escalas de forma inteligente e avaliar caixas de detecção com mais cuidado quando navios se sobrepõem ou seus contornos estão difusos.
Limpar a visualização e encontrar detalhes finos
A primeira melhoria é um módulo de desfocagem/defog chamado FFA-Net. Antes que o detector principal examine a imagem, o FFA-Net realça o contraste e restaura detalhes perdidos ao prestar atenção tanto aos canais inteiros de informação quanto a pixels individuais. Na prática, ele clareia a névoa para que a rede subsequente tenha dados mais nítidos para processar. Em seguida vem uma "backbone" redesenhada para extração de características, conhecida como PGIG-Backbone. Essa estrutura orienta como a informação flui e como os sinais internos da rede são atualizados. Ao gerenciar cuidadosamente esses gradientes e fundir sinais de múltiplos caminhos, ela se torna melhor em representar alvos de navios pequenos e baixa resolução que projetos padrão tendem a negligenciar.

Poder de foco e julgamento melhores na rede
Além de imagens mais claras e de uma backbone mais robusta, o PEW_YOLOv8 adiciona um módulo eficiente de atenção multiescala no meio da rede. Esse componente pondera diferentes regiões e camadas dos mapas de características, valorizando padrões que se assemelham a navios enquanto atenua ruído de fundo, como ondas ou docas. Por fim, os autores substituem a forma usual de pontuar caixas delimitadoras por um método chamado Wise-IoU v3. Em vez de ser excessivamente influenciada por alguns exemplos problemáticos, essa função de perda ajusta a intensidade do aprendizado a partir de diversos casos, o que ajuda o sistema a lidar com embarcações sobrepostas e bordas incertas sem se tornar instável.
O que os testes mostram
A equipe avalia seu método em um conjunto industrial de imagens infravermelhas de navios contendo 9.400 imagens de cenas reais de defesa costeira, incluindo mar aberto, portos e águas costeiras, e sete tipos de navios, de canoas a grandes cargueiros. Eles comparam o PEW_YOLOv8 com o YOLOv8 original e vários outros detectores populares. Cada módulo adicionado — desfog, a backbone aprimorada, o mecanismo de atenção e a nova função de perda — aumenta a precisão em uma quantidade mensurável. Quando combinadas, essas mudanças elevam a principal métrica de detecção para 92,2%, uma melhoria de quase quatro pontos percentuais sobre o YOLOv8 base, mantendo a velocidade de processamento adequada para monitoramento em tempo real.
Alertas mais claros no mar aberto
Em termos simples, este trabalho mostra como melhorias cuidadosamente pensadas podem transformar imagens infravermelhas ruidosas de navios em alertas automáticos muito mais confiáveis. Ao primeiro limpar a imagem, depois extrair detalhes mais ricos, focar em regiões prováveis de navios e tomar decisões mais inteligentes sobre alvos sobrepostos, o PEW_YOLOv8 enxerga mais embarcações e comete menos erros do que sistemas anteriores. Com refinamentos adicionais para cenas muito congestionadas e processamento ainda mais rápido, abordagens como esta podem ajudar a tornar o tráfego marítimo mais seguro, especialmente à noite e em condições adversas onde olhos humanos e câmeras tradicionais têm maior probabilidade de falhar.
Citação: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Palavras-chave: detecção de navios por infravermelho, vigilância marítima, detecção de objetos, aprendizado profundo, YOLOv8