Clear Sky Science · de
Infrarote Schiffszielerkennungs-Algorithmus PEW_YOLOv8 in komplexen Umgebungen
Schiffe im Dunkeln beobachten
Moderne Schifffahrtsrouten sind dicht und belebt, und viele Fahrzeuge nutzen inzwischen Infrarotkameras, um nachts und bei schlechtem Wetter zu überwachen. Aus diesen unscharfen Wärmebildern verlässliche Warnungen zu erzeugen ist jedoch schwieriger, als es scheint: entfernte Boote erscheinen als winzige Flecken, Meeresnebel verschleiert die Szene, und helle Lichter oder Wellen können die Software täuschen. Dieses Paper stellt PEW_YOLOv8 vor, eine neue Computer-Vision-Methode, die darauf ausgelegt ist, Schiffe in Infrarotvideos genauer zu erkennen — selbst wenn die Sicht trüb oder die Szene überladen ist.
Warum die Schiffserkennung so schwierig ist
Die Infraroterkennung von Schiffen zielt darauf ab, Fahrzeuge in Bildern automatisch anhand ihrer Wärmesignaturen statt des sichtbaren Lichts zu finden. Das ist attraktiv, weil Infrarotkameras sowohl bei Tag als auch bei Nacht und unter vielen rauen Bedingungen funktionieren. Die von ihnen erzeugten Bilder sind jedoch oft arm an Details und Kontrast. Feuchte Meeresluft führt zu Nebel und Unschärfe, sodass Schiffe verschmiert oder ausgewaschen erscheinen. Kleine und entfernte Boote belegen möglicherweise nur wenige Pixel, weshalb Standardalgorithmen sie übersehen. Wenn Wellen, Docks oder Stadtlichter den Hintergrund unruhig machen, können ältere Systeme diese Muster mit echten Zielen verwechseln, was zu Fehlalarmen oder verpassten Erkennungen führt.
Aufbauend auf schnellen Vision-Werkzeugen
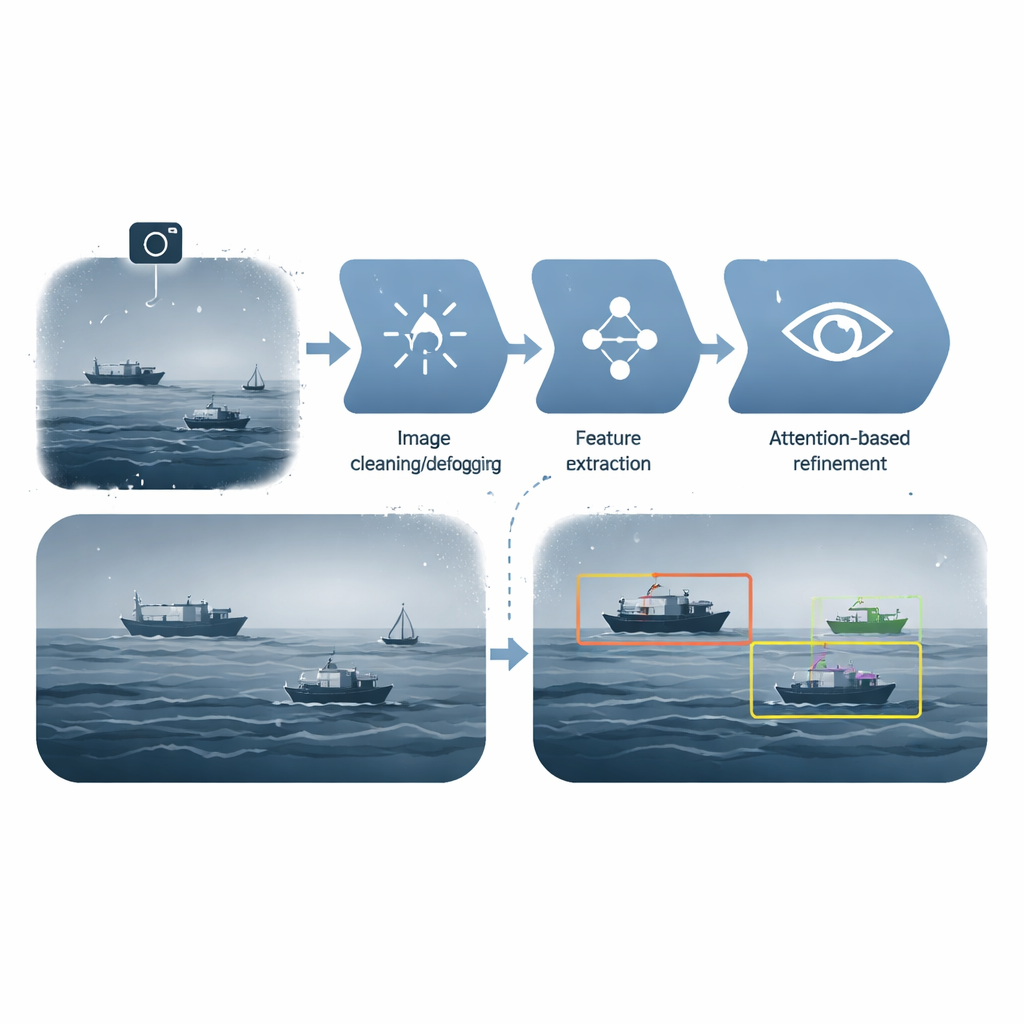
Die Autoren setzen bei YOLOv8 an, einem weit verbreiteten Deep-Learning-System, das in Echtzeit viele Objekttypen erkennen kann. YOLOv8 ist schnell, hat aber bei rohen Infrarot-Schiffsbildern weiterhin Probleme mit verrauschten Szenen, überlappenden Zielen und winzigen Fahrzeugen. Um dem zu begegnen, führen die Forschenden vier zentrale Verbesserungen ein, die zusammen PEW_YOLOv8 bilden. Jede Verbesserung adressiert eine andere Schwäche der ursprünglichen Pipeline: das Bereinigen des Eingangsbildes, das Extrahieren reichhaltigerer Details, das intelligente Zusammenführen von Informationen über Skalen hinweg und die sorgfältigere Bewertung von Erkennungsboxen bei überlappenden oder unscharf abgegrenzten Schiffen.
Die Sicht klären und feine Details finden
Die erste Verbesserung ist ein Entneblungsmodul namens FFA-Net. Bevor der Hauptdetektor das Bild analysiert, verbessert FFA-Net den Kontrast und stellt verlorene Details wieder her, indem es sowohl ganze Kanäle als auch einzelne Pixel berücksichtigt. Effektiv wird der Dunst beseitigt, sodass das nachfolgende Netzwerk schärfere Eingabedaten erhält. Dann folgt ein neu gestaltetes "Backbone" zur Merkmalextraktion, bekannt als PGIG-Backbone. Diese Struktur steuert den Informationsfluss und wie interne Signale des Netzwerks aktualisiert werden. Durch sorgfältiges Management dieser Gradienten und das Verschmelzen von Signalen aus mehreren Pfaden kann das System kleinere, niedrig aufgelöste Schiffsziele besser darstellen, die bei Standarddesigns oft übersehen werden.

Dem Netzwerk erlauben, sich besser zu fokussieren und zu entscheiden
Über klarere Bilder und ein stärkeres Backbone hinaus fügt PEW_YOLOv8 ein effizientes Multi-Skalen-Attention-Modul in der Mitte des Netzwerks hinzu. Diese Komponente gewichtet verschiedene Regionen und Ebenen der Merkmalskarten, verstärkt Muster, die wie Schiffe aussehen, und dämpft Hintergrundrauschen wie Wellen oder Docks. Schließlich ersetzen die Autoren die übliche Art der Bewertung von Begrenzungsboxen durch eine Methode namens Wise-IoU v3. Anstatt sich von einigen problematischen Beispielen übermäßig beeinflussen zu lassen, passt diese Verlustfunktion an, wie stark sie aus verschiedenen Fällen lernt, was dem System hilft, mit überlappenden Schiffen und unscharfen Konturen umzugehen, ohne instabil zu werden.
Was die Tests zeigen
Das Team bewertet seine Methode an einem industriellen Infrarot-Schiffsdataset mit 9.400 Bildern aus realen Küstenverteidigungsszenen, darunter offenes Meer, Häfen und Küstengewässer sowie sieben Schiffstypen von Kanus bis hin zu großen Containerschiffen. Sie vergleichen PEW_YOLOv8 mit dem ursprünglichen YOLOv8 und mehreren anderen gängigen Detektoren. Jedes hinzugefügte Modul — Entnebelung, das verbesserte Backbone, der Attention-Mechanismus und die neue Verlustfunktion — erhöht die Genauigkeit in messbarem Umfang. In Kombination heben diese Änderungen den Haupt-Erkennungswert auf 92,2 Prozent, eine Verbesserung von fast vier Prozentpunkten gegenüber dem Basis-YOLOv8, während die Verarbeitungsgeschwindigkeit für Echtzeitüberwachung geeignet bleibt.
Deutlichere Warnungen auf hoher See
Vereinfacht gesagt zeigt diese Arbeit, wie gezielt angepasste Verbesserungen verrauschte Infrarot-Schiffsbilder in deutlich verlässlichere automatische Warnungen verwandeln können. Indem zunächst das Bild gereinigt, dann reichhaltigere Details extrahiert, wahrscheinliche Schiffsregionen fokussiert und schließlich intelligentere Entscheidungen bei überlappenden Zielen gefällt werden, erkennt PEW_YOLOv8 mehr Schiffe und macht weniger Fehler als frühere Systeme. Mit weiterer Verfeinerung für stark überfüllte Szenen und noch schnellerer Verarbeitung könnten solche Ansätze die Sicherheit im Schiffsverkehr verbessern, insbesondere nachts und bei rauen Bedingungen, in denen menschliche Augen und traditionelle Kameras am ehesten versagen.
Zitation: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Schlüsselwörter: Infrarot-Schiffserkennung, maritime Überwachung, Objekterkennung, Deep Learning, YOLOv8