Clear Sky Science · sv
Infraröd algoritm för fartygsdetektion PEW_YOLOv8 i komplexa miljöer
Att bevaka fartyg i mörkret
Moderna farleder är trånga och trafikerade, och många fartyg förlitar sig i dag på infraröda kameror för att hålla uppsikt nattetid och i dåligt väder. Men att omvandla de fluffiga värmebilderna till tillförlitliga varningar är svårare än det låter: avlägsna båtar kan vara små suddiga prickar, havsdimma gör bilden grumlig och starka ljuskällor eller vågor kan lura mjukvaran. Denna artikel presenterar PEW_YOLOv8, en ny datorvisionsmetod utformad för att upptäcka fartyg i infraröra videor mer exakt, även när sikten är ogenomskinlig eller scenen är rörig.
Varför det är så svårt att upptäcka fartyg
Målet med infraröd fartygsdetektion är att automatiskt hitta fartyg i bilder baserat på deras värmesignaturer snarare än synligt ljus. Det är attraktivt eftersom infraröda kameror fungerar dag och natt och under många hårda förhållanden. Bilderna de producerar är dock ofta fattiga på detaljer och kontrast. Fuktig havsluft kan orsaka dimma och oskärpa, vilket gör att fartyg ser ut att vara utsmetade eller utspädda. Små och avlägsna båtar kan täcka bara ett fåtal pixlar, så standardalgoritmer förbiser dem. När vågor, kajer eller stadsljus skapar ett stökigt bakgrundsmönster kan äldre system förväxla dessa strukturer med verkliga mål, vilket leder till falska larm eller missade hot.
Bygger vidare på snabba visionsverktyg
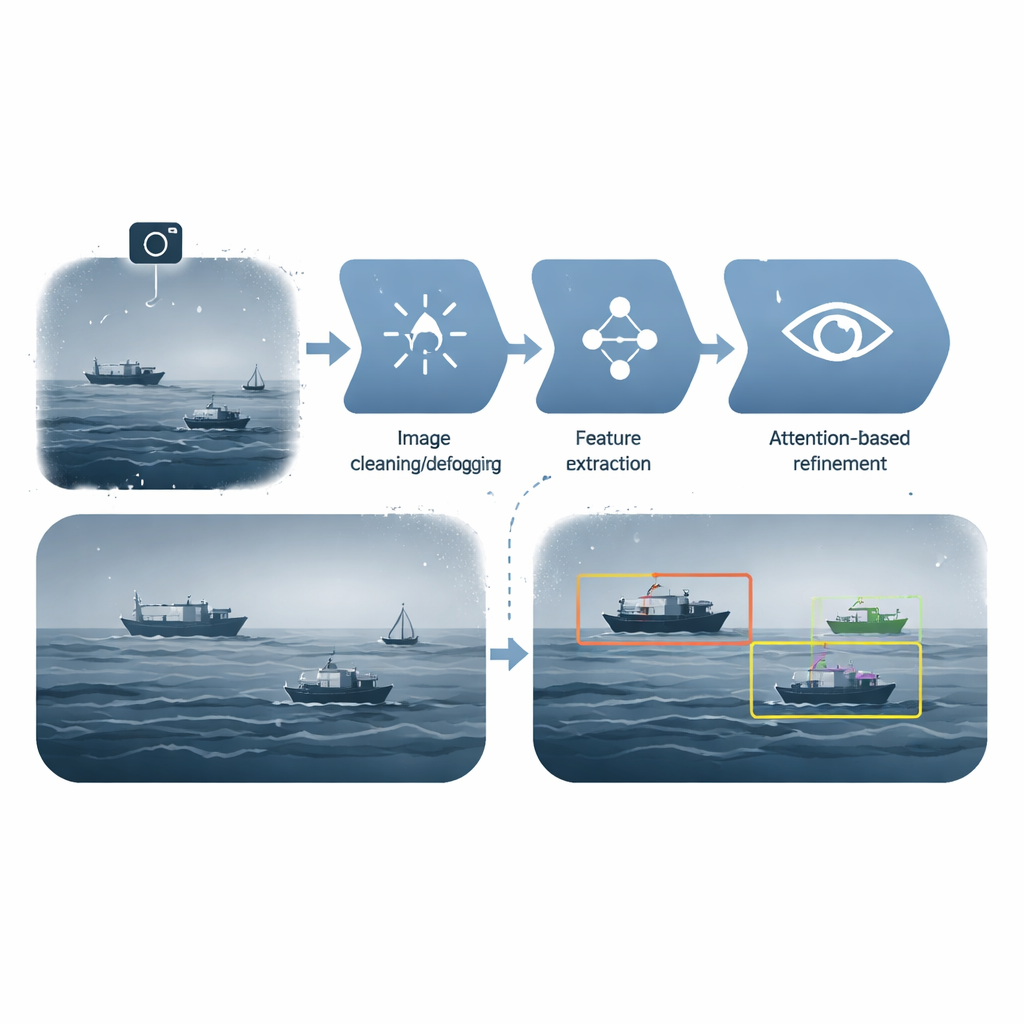
Författarna utgår från YOLOv8, ett mycket använt djupinlärningssystem som kan identifiera många typer av objekt i realtid. YOLOv8 är snabbt, men i råa infraröda fartygsbilder har det fortfarande problem med brusiga scener, överlappande mål och mycket små fartyg. För att åtgärda detta introducerar forskarna fyra centrala förbättringar som tillsammans bildar PEW_YOLOv8. Varje förbättring tar sikte på en annan svag punkt i den ursprungliga pipelinen: rengöring av ingångsbilden, extraktion av rikare detaljer, smart sammanslagning av information över skalor och noggrannare bedömning av detekteringsrutor när fartyg överlappar eller deras konturer är otydliga.
Rensa sikten och hitta fina detaljer
Den första förbättringen är en avdimningsmodul kallad FFA-Net. Innan huvuddetektorn alls betraktar bilden förbättrar FFA-Net kontrasten och återställer förlorade detaljer genom att ta hänsyn både till hela informationskanaler och till individuella pixlar. I praktiken rensar den dimman så att den efterföljande nätverksdelen får skarpare data att arbeta med. Därefter kommer en omarbetad "backbone" för feature-extraktion, känd som PGIG-Backbone. Denna struktur styr hur information flödar och hur nätverkets interna signaler uppdateras. Genom att noggrant hantera dessa gradienter och fusionera signaler från flera vägar blir den bättre på att representera små, lågupplösta fartygsmål som standarddesigner tenderar att förbise.

Låta nätverket fokusera och bedöma bättre
Utöver klarare bilder och en starkare backbone lägger PEW_YOLOv8 till en effektiv fler-skala uppmärksamhetsmodul i nätverkets mitt. Denna komponent väger olika regioner och lager i feature-kartorna, förstärker mönster som liknar fartyg samtidigt som bakgrundsbrus som vågor eller kajer tonas ner. Slutligen ersätter författarna det vanliga sättet att poängsätta begränsningsrutor med en metod kallad Wise-IoU v3. Istället för att påverkas för mycket av några problematiska exempel justerar denna förlustfunktion hur starkt den lär sig från olika fall, vilket hjälper systemet att hantera överlappande fartyg och otydliga gränser utan att bli instabilt.
Vad testerna visar
Teamet utvärderar sin metod på en industriell infraröd fartygsdataset som innehåller 9 400 bilder från verkliga kustförsvarsscener, inklusive öppet hav, hamnar och kustområden, samt sju fartygstyper från kanoter till stora containerfartyg. De jämför PEW_YOLOv8 mot ursprungliga YOLOv8 och flera andra populära detektorer. Varje tillagd modul—avdimning, förbättrad backbone, uppmärksamhetsmekanism och den nya förlustfunktionen—höjer noggrannheten med en mätbar mängd. Tillsammans höjer dessa förändringar huvuddetektionspoängen till 92,2 procent, en förbättring på nästan fyra procentenheter över bas-YOLOv8, samtidigt som bearbetningshastigheten hålls lämplig för realtidsövervakning.
Klarare varningar på öppet hav
Förenklat visar detta arbete hur noggrant utformade uppgraderingar kan förvandla brusiga infraröda fartygsbilder till mycket mer pålitliga automatiska varningar. Genom att först rensa bilden, sedan extrahera rikare detaljer, fokusera på sannolika fartygsregioner och fatta smartare beslut om överlappande mål ser PEW_YOLOv8 fler fartyg och gör färre misstag än tidigare system. Med ytterligare förfining för mycket tättrafikerade scener och ännu snabbare bearbetning skulle sådana angreppssätt kunna bidra till säkrare sjötrafik, särskilt nattetid och under svåra förhållanden där mänskliga ögon och traditionella kameror oftast misslyckas.
Citering: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Nyckelord: infraröd fartygsdetektion, maritim övervakning, objektdetektion, djupt lärande, YOLOv8