Clear Sky Science · es
Algoritmo de detección de objetivos navales en infrarrojo PEW_YOLOv8 en entornos complejos
Vigilando barcos en la oscuridad
Las rutas marítimas modernas están concurridas y muchas embarcaciones dependen ahora de cámaras infrarrojas para vigilar de noche y en condiciones meteorológicas adversas. Pero convertir esas imágenes térmicas borrosas en avisos fiables es más difícil de lo que parece: los barcos lejanos pueden ser manchas diminutas, la niebla marina difumina la escena y luces intensas o el oleaje pueden engañar al software. Este trabajo presenta PEW_YOLOv8, un nuevo método de visión por ordenador diseñado para detectar barcos en vídeos infrarrojos con mayor precisión, incluso cuando la visión está turbia o hay mucho desorden visual.
Por qué es tan difícil detectar barcos
La detección de barcos en infrarrojo busca localizar automáticamente embarcaciones en imágenes basándose en su firma térmica en lugar de la luz visible. Esto resulta atractivo porque las cámaras infrarrojas funcionan de día y de noche y en muchas condiciones adversas. Sin embargo, las imágenes que generan suelen tener poco detalle y bajo contraste. La humedad del aire marino puede causar neblina y borrosidad, haciendo que los barcos aparezcan difuminados o desvaídos. Las embarcaciones pequeñas y lejanas pueden ocupar solo unos pocos píxeles, por lo que los algoritmos estándar las pasan por alto. Cuando las olas, los muelles o las luces de la ciudad crean fondos complejos, los sistemas antiguos pueden confundir estos patrones con objetivos reales, aumentando las alarmas falsas o pasando por alto amenazas.
Basado en herramientas de visión rápidas
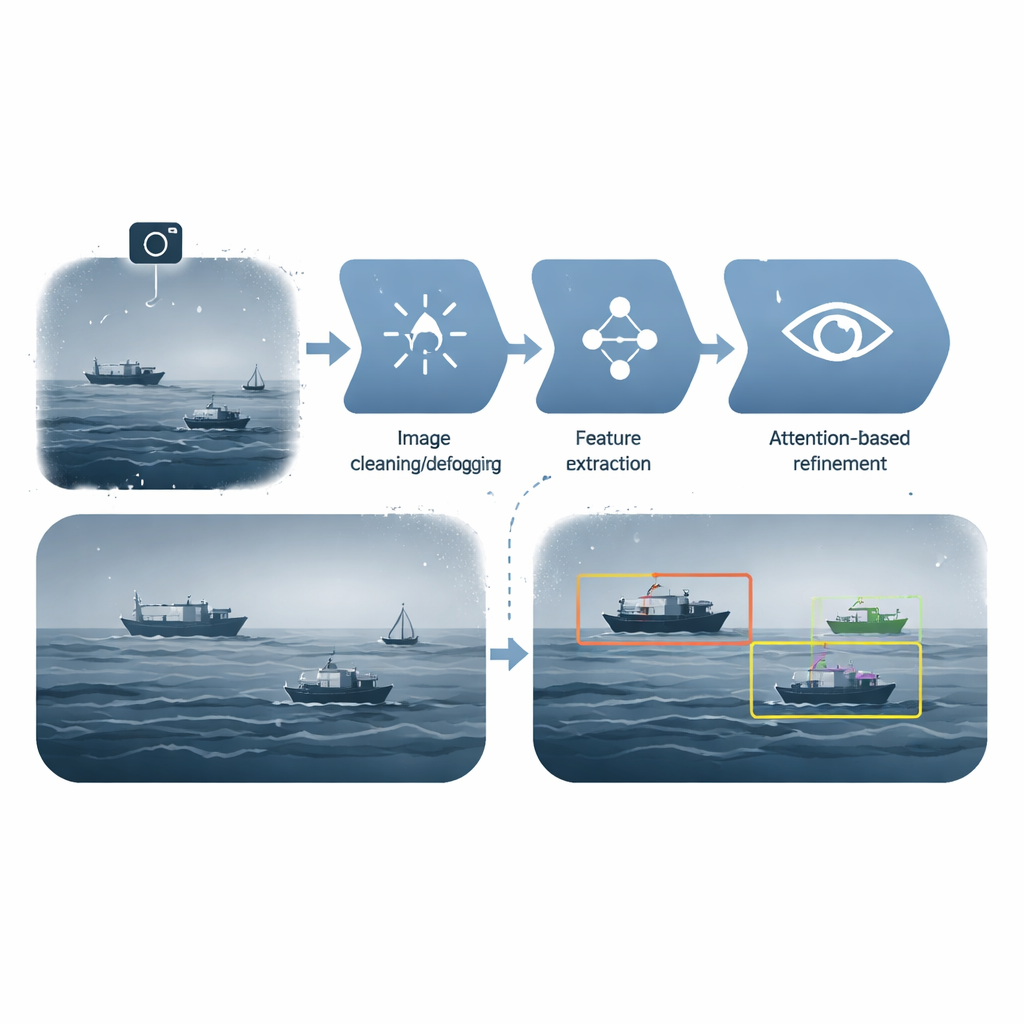
Los autores parten de YOLOv8, un sistema de aprendizaje profundo muy usado que puede identificar muchos tipos de objetos en tiempo real. YOLOv8 es rápido, pero en imágenes infrarrojas crudas de barcos todavía tiene dificultades con escenas ruidosas, objetivos solapados y embarcaciones diminutas. Para abordar esto, los investigadores introducen cuatro mejoras clave que juntas conforman PEW_YOLOv8. Cada mejora se centra en un punto débil distinto de la canalización original: limpiar la imagen de entrada, extraer detalles más ricos, combinar información entre escalas de forma inteligente y evaluar las cajas de detección con más cuidado cuando los barcos se solapan o sus contornos son borrosos.
Limpiar la vista y encontrar detalles finos
La primera mejora es un módulo de desnebulización llamado FFA-Net. Antes de que el detector principal examine la imagen, FFA-Net mejora el contraste y restaura detalles perdidos prestando atención tanto a canales completos de información como a píxeles individuales. En efecto, despeja la niebla para que la red posterior tenga datos más nítidos con los que trabajar. A continuación se presenta un “backbone” rediseñado para la extracción de características, conocido como PGIG-Backbone. Esta estructura guía cómo fluye la información y cómo se actualizan las señales internas de la red. Al gestionar cuidadosamente estos gradientes y fusionar señales de múltiples rutas, mejora la representación de objetivos navales pequeños y de baja resolución que los diseños estándar tienden a pasar por alto.

Permitir que la red se enfoque y juzgue mejor
Más allá de imágenes más claras y un backbone más potente, PEW_YOLOv8 añade un módulo de atención multiescala eficiente en la parte central de la red. Este componente pondera diferentes regiones y capas de los mapas de características, reforzando patrones que parecen barcos mientras atenúa el ruido de fondo como olas o muelles. Finalmente, los autores reemplazan la forma habitual de puntuar las cajas delimitadoras por un método llamado Wise-IoU v3. En lugar de dejarse influir en exceso por unos pocos ejemplos problemáticos, esta función de pérdida ajusta cuánto aprende de distintos casos, lo que ayuda al sistema a manejar embarcaciones solapadas y bordes poco claros sin volverse inestable.
Qué muestran las pruebas
El equipo evalúa su método en un conjunto de datos industrial de barcos en infrarrojo que contiene 9.400 imágenes procedentes de escenas reales de defensa costera, incluyendo mar abierto, puertos y aguas costeras, y siete tipos de embarcaciones desde canoas hasta grandes portacontenedores. Comparan PEW_YOLOv8 con el YOLOv8 original y varios otros detectores populares. Cada módulo añadido—desnebulización, el backbone mejorado, el mecanismo de atención y la nueva función de pérdida—aumenta la precisión en una cantidad medible. Cuando se combinan, estos cambios elevan la puntuación principal de detección hasta 92,2 por ciento, una mejora de casi cuatro puntos porcentuales sobre el YOLOv8 base, manteniendo la velocidad de procesamiento adecuada para la monitorización en tiempo real.
Avisos más claros en alta mar
En términos sencillos, este trabajo demuestra cómo mejoras cuidadosamente diseñadas pueden convertir imágenes infrarrojas ruidosas de barcos en alertas automáticas mucho más fiables. Al limpiar primero la imagen, luego extraer detalles más ricos, centrarse en las regiones con probabilidad de contener barcos y tomar decisiones más inteligentes sobre objetivos solapados, PEW_YOLOv8 detecta más embarcaciones y comete menos errores que los sistemas anteriores. Con mayor refinamiento para escenas muy concurridas y procesamiento aún más rápido, enfoques como este podrían ayudar a hacer el tráfico marítimo más seguro, especialmente de noche y en condiciones adversas donde la vista humana y las cámaras tradicionales son más propensas a fallar.
Cita: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Palabras clave: detección de barcos por infrarrojos, vigilancia marítima, detección de objetos, aprendizaje profundo, YOLOv8