Clear Sky Science · nl
Infrarood-zeevaartuigdetectie-algoritme PEW_YOLOv8 in complexe omgevingen
Schepen in het donker volgen
Moderne scheepvaartroutes zijn druk en veel vaartuigen vertrouwen ’s nachts en bij slecht weer op infraroodcamera’s om toezicht te houden. Het omzetten van die vage warmtesbeelden naar betrouwbare waarschuwingen blijkt echter lastiger dan het klinkt: verre schepen kunnen kleine vlekjes zijn, zeemist vervaagt het beeld en felle lichten of golven kunnen de software misleiden. Dit artikel introduceert PEW_YOLOv8, een nieuwe computer-visionmethode die is ontworpen om schepen in infraroodvideo’s nauwkeuriger te detecteren, zelfs wanneer het zicht troebel of rommelig is.
Waarom schependetectie zo lastig is
Infraroodzeevaartuigdetectie heeft tot doel automatisch vaartuigen te vinden in beelden op basis van hun warmtesignatuur in plaats van zichtbaar licht. Dit is aantrekkelijk omdat infraroodcamera’s dag en nacht en onder veel ruwe omstandigheden werken. De beelden die ze leveren hebben echter vaak weinig detail en contrast. Vochtige zeelucht kan voor nevel en onscherpte zorgen, waardoor schepen uitgewreven of uitgebleekt lijken. Kleine en verre bootjes beslaan mogelijk maar een paar pixels, zodat standaardalgoritmen ze over het hoofd zien. Wanneer golven, aanlegsteigers of stadslichten een drukke achtergrond vormen, kunnen oudere systemen deze patronen met echte doelen verwarren, wat leidt tot valse alarmen of gemiste bedreigingen.
Voortbouwen op snelle visietools
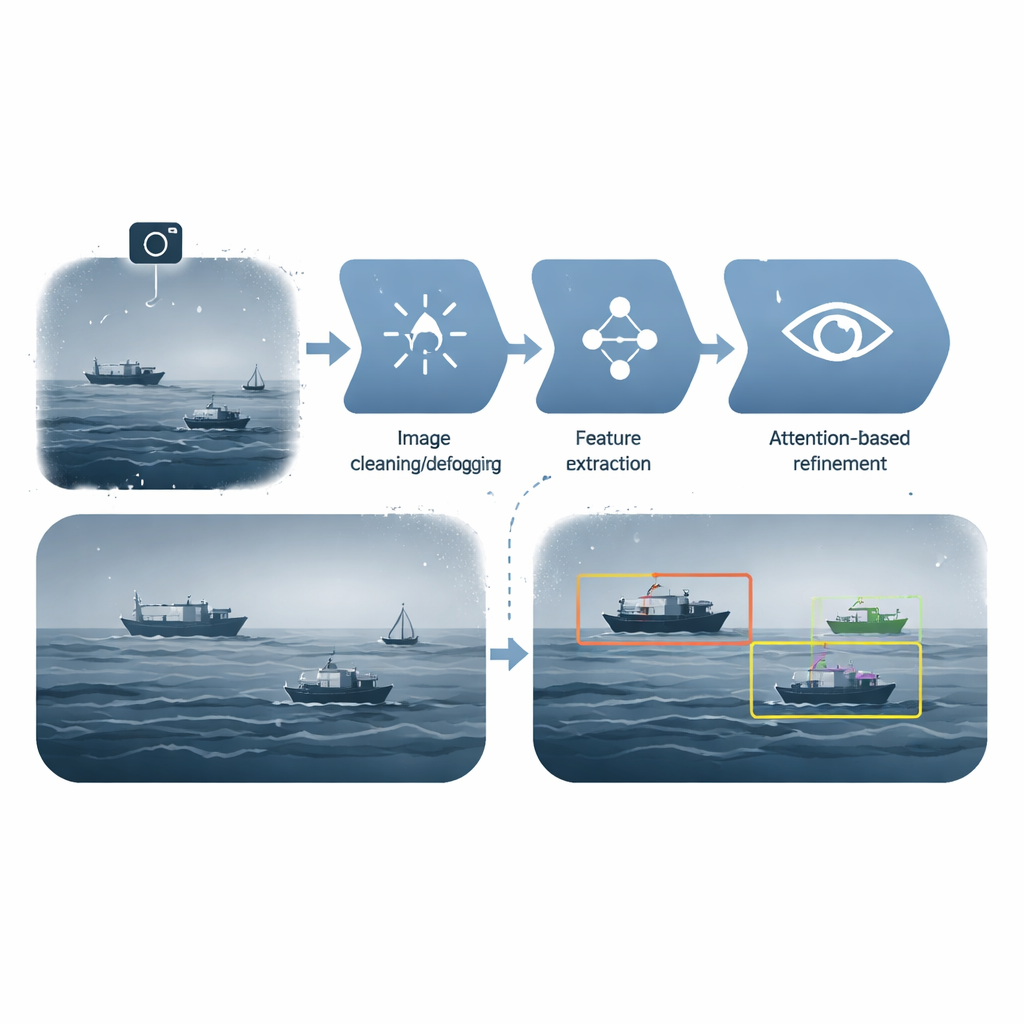
De auteurs beginnen bij YOLOv8, een veelgebruikt deep-learningsysteem dat in realtime vele soorten objecten kan herkennen. YOLOv8 is snel, maar in onbewerkte infraroodbeelden van zeevaartuigen heeft het nog steeds moeite met ruisachtige scènes, overlappende doelen en piepkleine vaartuigen. Om dit aan te pakken introduceren de onderzoekers vier belangrijke verbeteringen die samen PEW_YOLOv8 vormen. Elke verbetering richt zich op een ander zwak punt in de oorspronkelijke pijplijn: het reinigen van de invoerafbeelding, het extraheren van rijkere details, het slim combineren van informatie over schalen heen, en het zorgvuldiger beoordelen van detectiekaders wanneer schepen overlappen of hun contouren vaag zijn.
Het beeld schoner maken en fijne details vinden
De eerste verbetering is een ontnevelingsmodule genaamd FFA-Net. Voordat de hoofddetector naar de afbeelding kijkt, verbetert FFA-Net het contrast en herstelt het verloren details door zowel aandacht te besteden aan hele kanalen van informatie als aan individuele pixels. Het wist in wezen de nevel weg zodat het downstream-netwerk met scherperere gegevens kan werken. Vervolgens is er een herontworpen "backbone" voor feature-extractie, bekend als PGIG-Backbone. Deze structuur stuurt hoe informatie vloeit en hoe de interne signalen van het netwerk worden bijgewerkt. Door deze gradienten zorgvuldig te beheren en signalen uit meerdere paden te fuseren, wordt het beter in het representeren van kleine, lage-resolutiedoelen die standaardontwerpen geneigd zijn over het hoofd te zien.

Het netwerk beter laten focussen en oordelen
Buiten helderdere beelden en een sterkere backbone voegt PEW_YOLOv8 een efficiënte multi-schaal attentiemodule toe in het midden van het netwerk. Deze component weegt verschillende regio’s en lagen van de featuremaps, versterkt patronen die op schepen lijken en dempt achtergrondrommel zoals golven of aanlegsteigers. Tot slot vervangen de auteurs de gebruikelijke manier van scoren van begrenzingsvakken door een methode genaamd Wise-IoU v3. In plaats van te sterk beïnvloed te worden door een paar problematische voorbeelden past deze verliesfunctie aan hoe sterk er van verschillende gevallen wordt geleerd, wat het systeem helpt om om te gaan met overlappende vaartuigen en onduidelijke randen zonder instabiel te worden.
Wat de tests aantonen
Het team evalueert hun methode op een industriële infrarood-zeevaartuigendataset met 9.400 afbeeldingen uit echte kustverdedigingssituaties, waaronder open zee, havens en kustwateren, en zeven typen schepen van kano’s tot grote containerschepen. Ze vergelijken PEW_YOLOv8 met de oorspronkelijke YOLOv8 en verschillende andere populaire detectors. Elke toegevoegde module — ontneveling, de verbeterde backbone, de attentiemechanisme en de nieuwe verliesfunctie — verhoogt de nauwkeurigheid met een meetbaar bedrag. Samen tillen deze veranderingen de belangrijke detectiescore naar 92,2 procent, een verbetering van bijna vier procentpunten ten opzichte van de basis YOLOv8, terwijl de verwerkingssnelheid geschikt blijft voor realtime monitoring.
Heldere waarschuwingen op volle zee
In eenvoudige woorden toont dit werk hoe zorgvuldig aangepaste verbeteringen vage infraroodbeelden van zeevaartuigen kunnen omzetten in veel betrouwbaardere automatische waarschuwingen. Door eerst het beeld te reinigen, vervolgens rijkere details te extraheren, te focussen op waarschijnlijke scheepsregio’s en slimmer te beslissen over overlappende doelen, ziet PEW_YOLOv8 meer vaartuigen en maakt het minder fouten dan eerdere systemen. Met verdere verfijning voor sterk drukke scènes en nog snellere verwerking kunnen dergelijke benaderingen bijdragen aan veiliger maritiem verkeer, vooral ’s nachts en bij ruwe omstandigheden waarin menselijke ogen en traditionele camera’s het meest te kort schieten.
Bronvermelding: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Trefwoorden: infrarood zeevaartherkenning, maritieme bewaking, objectdetectie, deep learning, YOLOv8