Clear Sky Science · he
אלגוריתם גילוי כלי שיט אינפרא-אדום PEW_YOLOv8 בסביבות מורכבות
צפייה בספינות בחושך
נתיבי השיט המודרניים צפופים ופעילים, ורבים מכלי השיט מסתמכים כיום על מצלמות אינפרא-אדום לשמירה על תצפית בלילה ובמזג אוויר קשה. אבל המרת תמונות החום המטושטשות הללו לאזהרות מהימנות קשה יותר ממה שנדמה: כלי שיט רחוקים עלולים להיראות ככתמים זעירים, ערפיח ימי מטשטש את הסצנה, ואורות חזקים או גלים עלולים להטעות את התוכנה. מאמר זה מציג את PEW_YOLOv8, שיטת ראייה ממוחשבת חדשה שנועדה לזהות כלי שיט בווידאו אינפרא-אדום בצורה מדויקת יותר, גם כאשר המראה מעורפל או מלא הפרעות.
מדוע זיהוי ספינות כל כך מאתגר
מטרת גילוי כלי שיט באינפרא-אדום היא לאתר באופן אוטומטי כלי שיט בתמונות על בסיס חתימות החום שלהם ולא על בסיס אור נראה. זה מושך כי מצלמות אינפרא-אדום פועלות יום ולילה ובתנאים קשים רבים. עם זאת, התמונות שהן מייצרות פעמים רבות דלות בפרטים ובניגודיות. אוויר ימי לח יכול לגרום להערות וטשטוש, מה שגורם לכלי השיט להיראות מטושטשים או דהויים. סירות קטנות ורחוקות עשויות לתפוס רק מספר פיקסלים בודדים, ולכן אלגוריתמים סטנדרטיים מפספסים אותן. כאשר גלים, רציפונים או אורות עירוניים יוצרים רקע עמוס, מערכות ישנות עלולות לבלבל דפוסים אלה עם מטרות אמיתיות, מה שמוביל לאזעקות שווא או להחמצת איומים.
בניית שיפורים על כלים מהירים בתחום הראייה
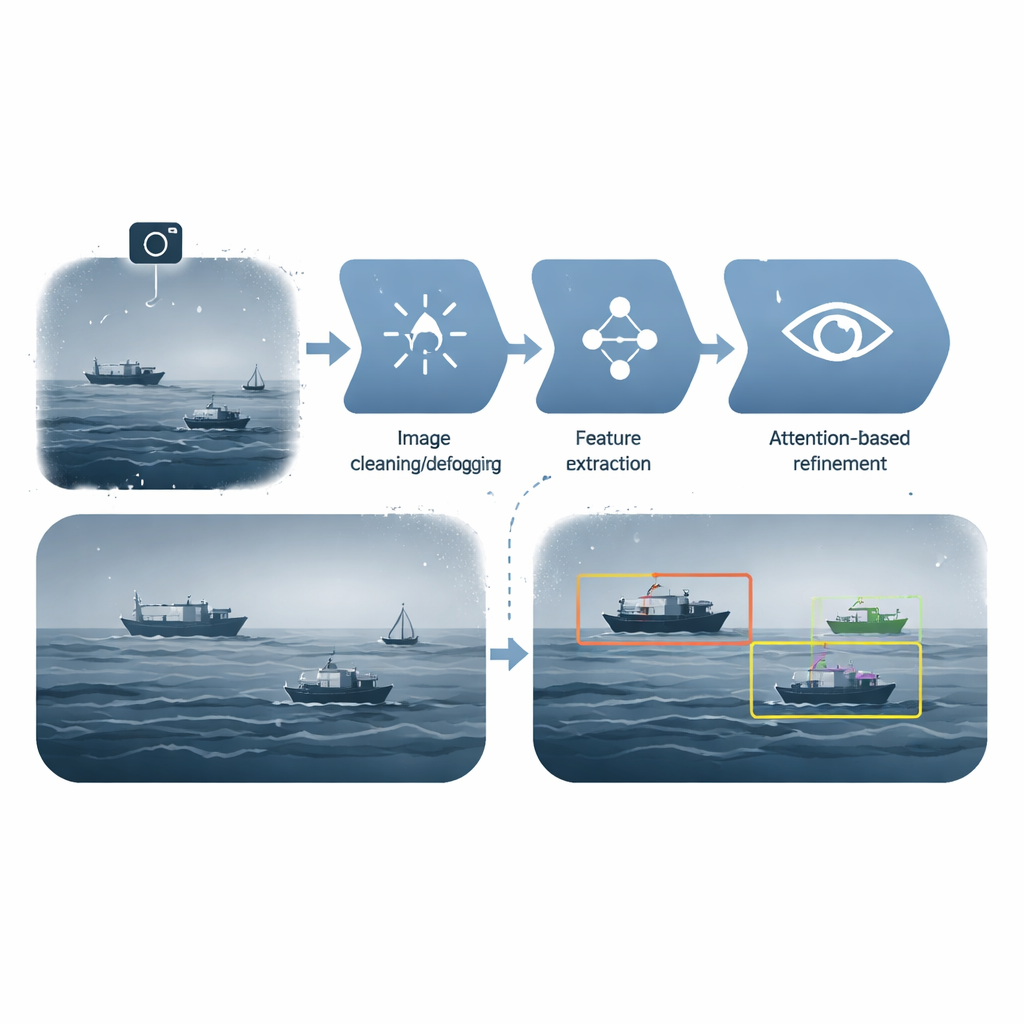
המחברים מתחילים מ-YOLOv8, מערכת למידה עמוקה נפוצה היכולה לזהות סוגים רבים של עצמים בזמן אמת. YOLOv8 מהיר, אך בתמונות אינפרא-אדום גולמיות של כלי שיט הוא עדיין נאבק בסצנות רועשות, מטרות חופפות וכלי שיט זעירים. כדי להתמודד עם זאת, החוקרים מציגים ארבעה שדרוגים מרכזיים שיוצרים יחד את PEW_YOLOv8. כל שדרוג מתמקד בחולשה אחרת בצנרת המקורית: ניקוי קלט התמונה, חילוץ פרטים עשירים יותר, שילוב חכם של מידע בין סקלות, ושיפוט מדויק יותר של תיבות גילוי כאשר ספינות חופפות או קווי המתאר שלהן מטושטשים.
ניקוי המראה ומציאת פרטים עדינים
השדרוג הראשון הוא מודול נגד ערפיח הנקרא FFA-Net. לפני שהמאתר הראשי מסתכל בכלל על התמונה, FFA-Net משפר ניגודיות ומשחזר פרטים אבודים על ידי התמקדות הן בערוצי המידע הכוללים והן בפיקסלים בודדים. למעשה, הוא מנקה את הערפיח כך שלרשת שמלמעלה יהיו נתונים חדים יותר לעיבוד. לאחר מכן מגיע "חוליה עיקרית" (backbone) משודרגת לחילוץ תכונות, הידועה כ-PGIG-Backbone. מבנה זה מנווט את זרימת המידע ואת עדכוני האותות הפנימיים של הרשת. על ידי ניהול מדוד של המדרונים ואיחוי אותות ממספר מסלולים, הוא משתפר ביכולת לייצג מטרות ספינות קטנות ובעלות רזולוציה נמוכה שדגמים סטנדרטיים נוטים להתעלם מהן.

מתן מיקוד ושיפוט טובים יותר לרשת
מעבר לתמונות ברורות יותר ולחוליה עיקרית חזקה יותר, PEW_YOLOv8 מוסיף מודול תשומת לב רב-סקלתי יעיל באמצע הרשת. רכיב זה שוקל אזורים ושכבות שונות של מפות התכונה, מחזק דפוסים שנראים כמו ספינות וממעיט ברעש רקע כגון גלים או רציפונים. לבסוף, המחברים מחליפים את דרך הניקוד המקובלת של תיבות ההגבלה בשיטה שנקראת Wise-IoU v3. במקום להיות מושפעת יתר על המידה ממעט דוגמות בעייתיות, פונקציית האיבוד הזו מתאימה את עוצמת הלמידה עבור מקרים שונים, דבר שעוזר למערכת להתמודד עם כלי שיט חופפים וגבולות לא ברורים מבלי להפוך לאי-יציבה.
מה מראים המבחנים
הצוות מעריך את שיטתו על מאגר תעשייתי של תמונות אינפרא-אדום לגילוי כלי שיט המכיל 9,400 תמונות מסצנות הגנה חופיות אמיתיות, כולל ים פתוח, נמלים ומי חוף, ושבעה סוגי כלי שיט מסוגים שונים מצינורות ועד מכליות מכולות גדולות. הם משווים את PEW_YOLOv8 ל-YOLOv8 המקורי ולכמה מגששי עצמים פופולריים אחרים. כל מודול שהתווסף — נגד הערפיח, החוליה המשופרת, מנגנון התשומת לב ופונקציית האיבוד החדשה — מעלה את הדיוק בכמות נמדדת. כשהשינויים משולבים, הם מגדילים את ציון הזיהוי הראשי ל-92.2 אחוז, שיפור של כמעט ארבע נקודות אחוז על פני YOLOv8 הבסיסי, תוך שמירה על מהירות עיבוד המתאימה לניטור בזמן אמת.
אזהרות ברורות יותר בים הפתוח
באופן פשוט, עבודה זו מראה כיצד שדרוגים מותאמים בקפידה יכולים להפוך תמונות אינפרא-אדום רועשות של כלי שיט לאזהרות אוטומטיות אמינות הרבה יותר. על ידי ניקוי התמונה קודם כל, חילוץ פרטים עשירים יותר, מיקוד באזורים סבירים לכלי שיט וקבלת החלטות חכמה יותר לגבי מטרות חופפות, PEW_YOLOv8 רואה יותר כלי שיט ומבצע פחות טעויות מאשר מערכות מוקדמות. עם שיפורים נוספים לסצנות צפופות במיוחד ועיבוד מהיר עוד יותר, גישות כאלו עשויות לתרום לבטיחות התנועה הימית, במיוחד בלילה ובתנאים גסים שבהם העיניים האנושיות והמצלמות המסורתיות עלולות להיכשל.
ציטוט: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
מילות מפתח: גילוי כלי שיט באינפרא-אדום, השגחה ימית, זיהוי עצמים, למידה עמוקה, YOLOv8