Clear Sky Science · fr
Algorithme de détection de cibles navires infrarouge PEW_YOLOv8 en environnements complexes
Surveiller les navires dans l’obscurité
Les voies de navigation modernes sont denses et animées, et de nombreux navires s’appuient désormais sur des caméras infrarouges pour surveiller la nuit et par mauvais temps. Mais transformer ces images thermiques floues en alertes fiables est plus difficile qu’il n’y paraît : les bateaux lointains peuvent n’être que de minuscules taches, le brouillard marin voile la scène, et des lumières vives ou des vagues peuvent tromper les logiciels. Cet article présente PEW_YOLOv8, une nouvelle méthode de vision par ordinateur conçue pour repérer les navires dans des vidéos infrarouges avec plus de précision, même lorsque la vue est trouble ou encombrée.
Pourquoi repérer les navires est si délicat
La détection de navires en infrarouge vise à trouver automatiquement les embarcations dans les images à partir de leurs signatures thermiques plutôt qu’en lumière visible. C’est intéressant parce que les caméras infrarouges fonctionnent de jour comme de nuit et dans de nombreuses conditions difficiles. Cependant, les images qu’elles produisent sont souvent pauvres en détails et en contraste. L’air humide en mer peut provoquer du brouillard et du flou, rendant les navires estompés ou délavés. Les petites embarcations éloignées peuvent occuper seulement quelques pixels, si bien que les algorithmes classiques les ignorent. Quand les vagues, les quais ou les lumières urbaines forment des arrière-plans chargés, les systèmes anciens peuvent confondre ces motifs avec des cibles réelles, augmentant les fausses alertes ou manquant des menaces.
Partir d’outils de vision rapides
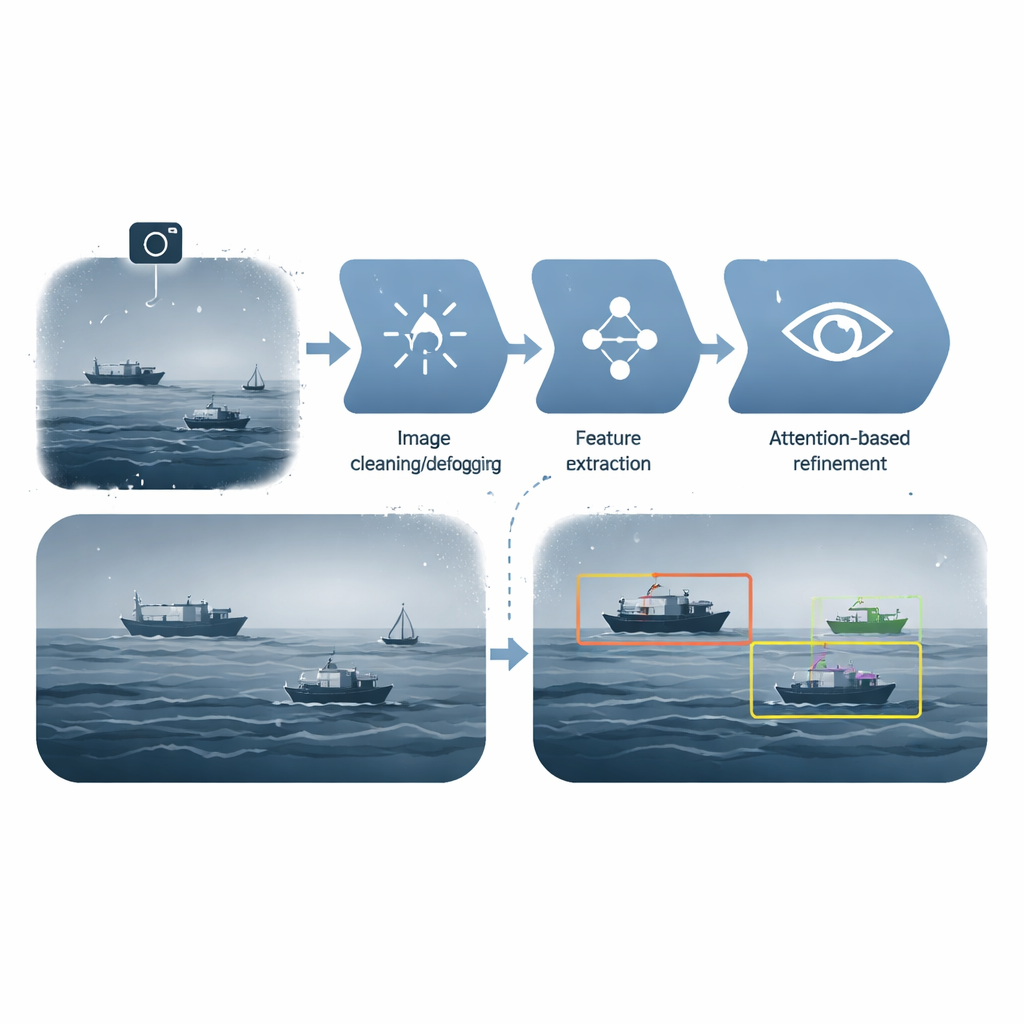
Les auteurs partent de YOLOv8, un système d’apprentissage profond largement utilisé qui peut identifier en temps réel de nombreux types d’objets. YOLOv8 est rapide, mais sur des images infrarouges brutes de navires il peine encore face aux scènes bruitées, aux cibles qui se chevauchent et aux embarcations minuscules. Pour y remédier, les chercheurs introduisent quatre améliorations clés qui forment ensemble PEW_YOLOv8. Chaque amélioration cible une faiblesse différente du pipeline original : nettoyer l’image d’entrée, extraire des détails plus riches, combiner intelligemment l’information à différentes échelles et juger les boîtes de détection avec plus de soin lorsque les navires se chevauchent ou que leurs contours sont flous.
Clarifier la vue et trouver les détails fins
La première amélioration est un module de défogage nommé FFA-Net. Avant que le détecteur principal n’analyse l’image, FFA-Net améliore le contraste et restaure les détails perdus en prêtant attention à la fois aux canaux d’information globaux et aux pixels individuels. En pratique, il dissipe la brume pour que le réseau en aval dispose de données plus nettes. Vient ensuite une « backbone » repensée pour l’extraction de caractéristiques, appelée PGIG-Backbone. Cette structure guide la circulation de l’information et comment les signaux internes du réseau sont mis à jour. En gérant soigneusement ces gradients et en fusionnant des signaux provenant de chemins multiples, elle devient meilleure pour représenter les petites cibles navires en basse résolution que les conceptions standard ont tendance à négliger.

Laisser le réseau se concentrer et mieux juger
Au-delà d’images plus claires et d’une backbone renforcée, PEW_YOLOv8 ajoute un module d’attention multi-échelle efficace au centre du réseau. Ce composant pèse différentes régions et couches des cartes de caractéristiques, renforçant les motifs qui ressemblent à des navires tout en atténuant le bruit d’arrière-plan tel que les vagues ou les quais. Enfin, les auteurs remplacent la manière habituelle de noter les boîtes englobantes par une méthode appelée Wise-IoU v3. Plutôt que d’être excessivement influencée par quelques exemples problématiques, cette fonction de perte ajuste la force d’apprentissage selon les cas, ce qui aide le système à gérer les navires qui se chevauchent et les contours incertains sans devenir instable.
Ce que montrent les tests
L’équipe évalue sa méthode sur un jeu de données industriel de navires infrarouges contenant 9 400 images issues de scènes réelles de défense côtière, couvrant mer ouverte, ports et eaux côtières, et sept types de navires, de la pirogue aux gros porte-conteneurs. Ils comparent PEW_YOLOv8 au YOLOv8 d’origine et à plusieurs autres détecteurs populaires. Chaque module ajouté — le défogage, la backbone améliorée, le mécanisme d’attention et la nouvelle fonction de perte — augmente la précision d’un montant mesurable. Combinées, ces modifications élèvent le score principal de détection à 92,2 %, une amélioration d’environ quatre points de pourcentage par rapport au YOLOv8 de base, tout en conservant une vitesse de traitement compatible avec la surveillance en temps réel.
Des alertes plus claires en haute mer
En termes simples, ce travail montre comment des améliorations soigneusement ciblées peuvent transformer des images infrarouges de navires bruitées en alertes automatiques beaucoup plus fiables. En nettoyant d’abord l’image, puis en extrayant des détails plus riches, en se concentrant sur les régions susceptibles de contenir des navires et en prenant des décisions plus intelligentes concernant les cibles qui se chevauchent, PEW_YOLOv8 détecte plus d’embarcations et commet moins d’erreurs que les systèmes précédents. Avec des raffinements supplémentaires pour les scènes très encombrées et un traitement encore plus rapide, des approches de ce type pourraient contribuer à rendre le trafic maritime plus sûr, notamment la nuit et par conditions difficiles où l’œil humain et les caméras traditionnelles sont les plus susceptibles d’échouer.
Citation: Dong, T., Zhu, M. & Tang, G. Infrared ship target detection algorithm PEW_YOLOv8 in complex environments. Sci Rep 16, 10240 (2026). https://doi.org/10.1038/s41598-026-40574-8
Mots-clés: détection de navires infrarouge, surveillance maritime, détection d'objets, apprentissage profond, YOLOv8