Clear Sky Science · tr
Beklenmedik durumlarda çevrimiçi öğrenmeyle kontrolü yeniden kurarak robotları rayına oturtmak
Neden robotların kontrol altında tutulması önemli
Robotlar fabrika zeminlerini terk edip yoğun, öngörülemez ortamlara giriyor: şehir sokakları, çiftlikler, afet bölgeleri ve hatta deniz yolları. Bu ortamlarda ani bir rüzgar darbesi, bir buz tabakası ya da hasarlı bir tekerlek robotun tasarımcılarının planlamadığı biçimlerde davranmasına neden olabilir; bu da insanları, mülkü ve görevleri riske atar. Bu makale, beklenmeyen durumlarda robotların insan kontrollü kalmasına yardımcı olan ve iç işleyişlerini baştan tasarlamaya gerek bırakmayan hızlı öğrenen bir eklenti olan FLAIR’i tanıtıyor. 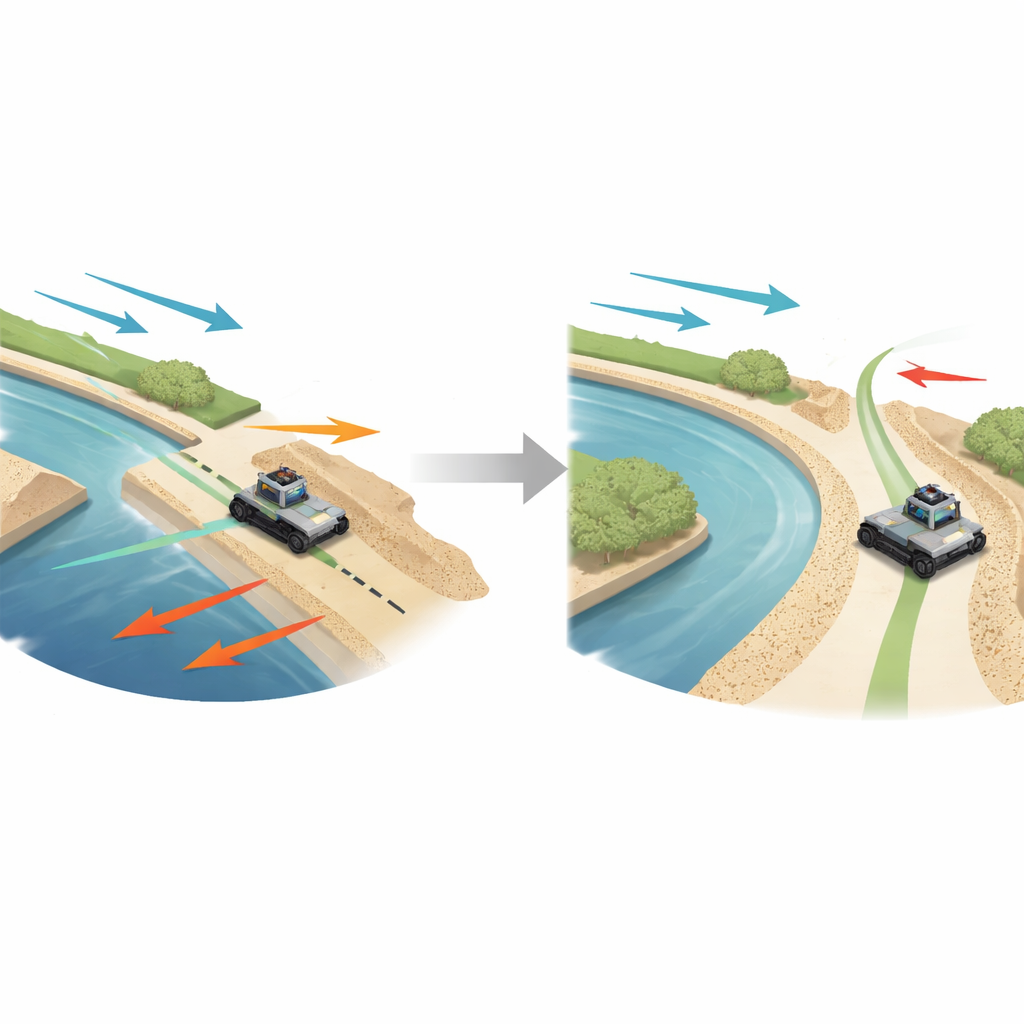
Robotlar ve gerçek dünya
Çoğu robot ve akıllı araç, mühendislerin öngörebildiği ve kodlayabildiği koşullara göre ayarlanır—bir depoda kuru zeminler, iyi işaretlenmiş yollar, stabil donanım. Gerçek dünyada ise işler yolunda gitmez: yük kaydığında ağırlık yer değiştirir, paletler aşınır, zemin kayganlaşır veya yan rüzgarlar ve su akıntıları gibi kuvvetler araçları rotasından alıkoyar. Böyle olduğunda bir operatör kolu ileriye itebilir fakat makine yanlara doğru kayabilir. Yazarlar bir robotu, tepkisi bir kişinin makul biçimde beklediğiyle örtüştüğünde “kullanılabilir” olarak tanımlıyor; güçlü bozulmalar altında bu bağ kopar ve bir geminin kanalı kapatacak şekilde takılmasından kazalara kadar sonuçlar doğurur. Zorluk, bozulmanın önceden beklenmemiş olsa bile bu sezgisel komut‑hareket bağını hızla yeniden kurmaktır.
Mevcut kontrolörlerin üstüne bir öğrenme katmanı
Robotun düşük seviyeli kontrolörünü her olası aksilik için yeniden tasarlamak yerine araştırmacılar FLAIR adlı yeni bir yüksek seviyeli katmanı ekliyor—FLAIR, Fast Learning‑Based Adaptation for Immediate Recovery’nin kısaltması. FLAIR, bir insan operatörün gönderdiği “ileri git” ya da “soldan dön” gibi aynı komutları dinler ve yerleşik sensörlerle robotun gerçekte nasıl hareket ettiğini izler. İstenen hareketle gerçek hareketi karşılaştırarak makineyi o anda rahatsız eden durumu, örneğin bir paletin tutuşunun azalması veya rüzgardan yana doğru itme gibi, kompakt bir matematiksel tanımla öğrenir. Her 225 milisaniyede bir bu dahili resmi günceller ve orijinal kontrolöre iletmeden önce komutları hafifçe ayarlar. Sistemi insanların anlayabileceği tutmak için FLAIR, genel bozulmayı opak derin ağlar yerine basit eğrilerle temsil eder ve şu anda mekânda nerelerin veya hangi yönlerin en tehlikeli olduğunu vurgulayabilir. 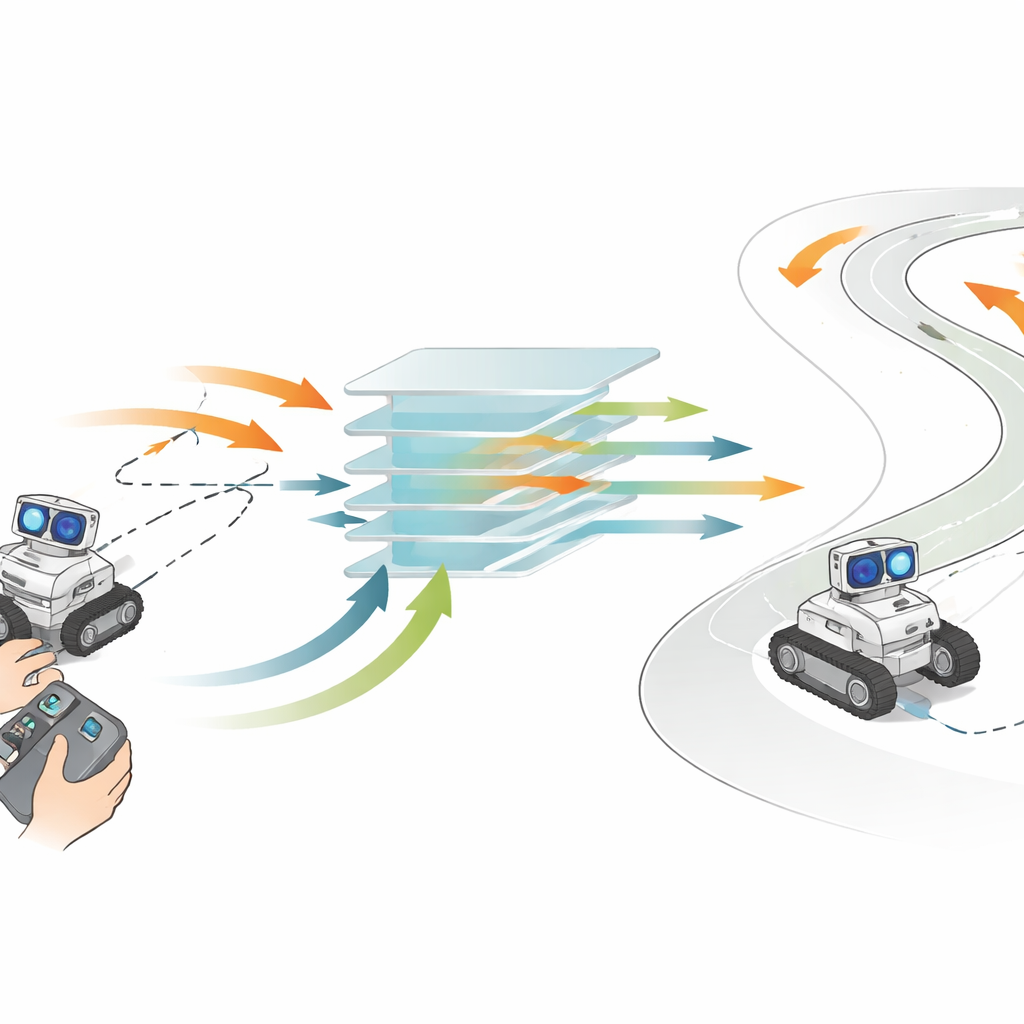
Rampalar, virajlar ve yapay fırtınalarda robotları test etmek
FLAIR’in yeteneklerini sınamak için ekip, paletli bir robotla kapalı devre test parkurlarında 700’den fazla deney gerçekleştirdi. Bir parkur sık S‑şeklinde virajlar içeriyordu; bir diğeri kaygan bir rampa ile robotu yana iten dış fanların bulunduğu sahte bir rüzgar bölümünü birleştirdi; üçüncüsü ise sensörleri sarsmak ve ek gürültü getirmek için tümsekler ve engeller ekledi. Araştırmacılar farklı sorun türlerini simüle ettiler: kalıcı zayıflamış bir palet gibi statik hasar, zamanla değişen dinamik hasar ve bozulmanın konuma veya yönelime bağlı olduğu durumlar—kanal duvarlarına doğru çeken Bernoulli etkileri gibi gerçek fenomenleri andıran. Otomatik bir sürücü FLAIR ile ve FLAIR olmadan aynı yolları izledi ve ekip robotun yolunun komutlarla ne kadar örtüştüğünü ve her turun tamamlanmasının ne kadar sürdüğünü karşılaştırdı.
Mevcut yöntemlerden daha hızlı kontrolü geri kazanmak
Tüm test bölümlerinde FLAIR, komutlanan ile gerçek hareket arasındaki uyumsuzluğu yaklaşık dörtte üç oranında azalttı ve tur sürelerini benzer oranda kısaltarak performansı rahatsız edilmemiş bir robota yakın hale getirdi. Özellikle kayma ve donanım hasarının karışık olduğu zorlu bir rampada, neredeyse tam kullanılabilirliği etkili biçimde geri getirdi; oysa standart optimal ve adaptif kontrolörler en iyi durumda hatayı yarıya indirebildi. Bir çevrimiçi pekiştirmeli öğrenme temel yöntemi tamamen başarısız oldu ve uyum sağlamadan önce güvensiz hale geldi. FLAIR ayrıca bozulma çalışmanın ortasında değiştiğinde de sağlam olduğunu gösterdi: önceki modelinin artık gerçekle uyuşmadığını tespit etti, belleğini temizledi ve saniyeler içinde yeni bir tanım öğrendi; böylece koşullar değişse bile robot yönlendirilebilir kaldı. Aynı strateji, FLAIR’in zayıflamış bir bacağa karşı telafiye yardımcı olduğu çok eklemli simüle altı ayaklı bir robota da aktarıldı.
Robotun hissettiklerini görmek
Robotları rayında tutmanın ötesinde FLAIR, onların dünyasına bir pencere açıyor. Bozulmaların konuma ve yöne göre nasıl değiştiğini modellediği için operatöre kuvvetlerin en güçlü olduğu yerleri—bir kanal kenarı, belirli bir rampa açısı veya rüzgara karşı yön—gösterebiliyor. Bu “içgörü” sistemi bir teşhis aracına dönüştürüyor; sorunun aşınma, zemin koşulları mı yoksa dış bir itme mi olduğuna dair ipuçları veriyor ve yüksek riskli bölgelerden kaçınan daha güvenli yollar öneriyor. Önemli olarak, yöntem yalnızca robotun mevcut sensörlerine ve gömülü bilgisayarına dayanıyor, bu yüzden saha koşullarında bulut bağlantısı veya önceden toplanmış eğitim verisi gerektirmeden çalışabiliyor.
Günlük robotik için anlamı
Çalışma, hafif bir öğrenme katmanının robotları sürprizlere karşı çok daha dayanıklı kılabileceğini gösteriyor; her olası bozulmanın mükemmel modellerine ihtiyaç duymadan. Düzeltici kuvvetler motorların fiziksel olarak sağlayabileceği sınırlar içinde kaldığı sürece, FLAIR insan komutlarını doğru düşük seviyeli eylemlere nasıl çevireceğini hızla yeniden öğrenebilir; bu, engebeli arazide ve değişen koşullarda bile geçerli. Uzman olmayanlar için bu, gelecekteki kara araçlarının, teslimat robotlarının veya keşif makinelerinin daha güvenilir araçlar gibi davranabileceği anlamına geliyor—çevre sorun çıkardığında bile “ne demek istediğini yapmaya” devam etmeleri ve sınırlar aşıldığında aniden rotadan sapmak yerine ipuçları sunmaları.
Atıf: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Anahtar kelimeler: robot dayanıklılığı, çevrimiçi öğrenme kontrolü, özerk araçlar, robot hasar kurtarma, adaptif robotik