Clear Sky Science · he
להחזיר את הרובוטים למסלול על ידי שיקום הבקרה במצבים בלתי צפויים באמצעות למידה מקוונת
מדוע חשוב לשמור על שליטה ברובוטים
רובוטים עוברים מרצפות המפעלים למקומות צפופים ובלתי־צפויים: רחובות עירוניים, חוות, אזורי אסון ואפילו נתיבי שיט. בסביבות אלה, משב רוח פתאומי, שכבת קרח או גלגל פגוע יכולים להקפיץ את התנהגות הרובוט לשטח שמעולם לא נועד על ידיי המפתחים, ולסכן אנשים, רכוש ומשימות. מאמר זה מציג את FLAIR, תוספת מהירה מבוססת־למידה שמסייעת לשמור על שליטה אנושית כשהקורה בלתי צפוי, מבלי להידרש לשחזר או לעצב מחדש את מנגנוני הבקרה הפנימיים מהיסוד. 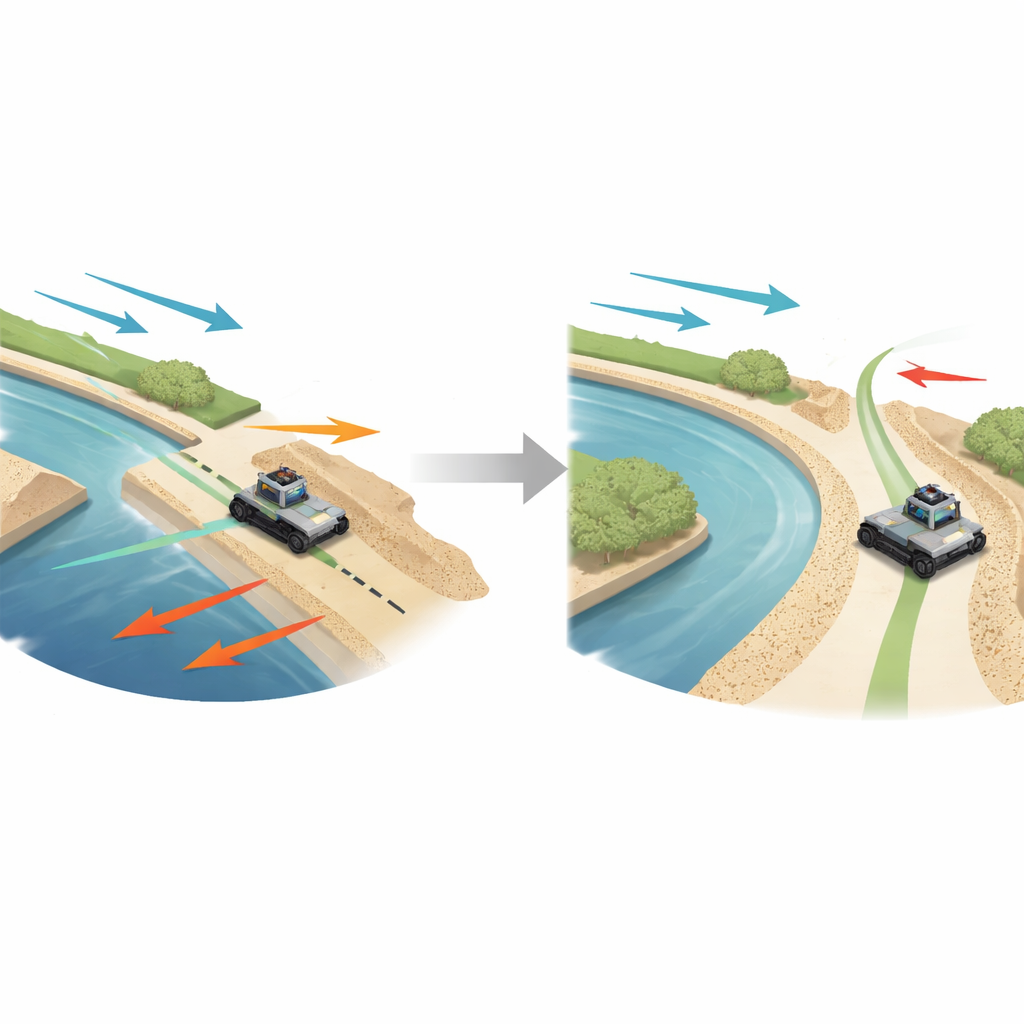
רובוטים מול העולם האמיתי
רוב רובוטים והרכבים החכמים מכוילים לתנאים שהמהנדסים יכולים לצפות ולתכנת—רצפות יבשות במחסן, כבישים מסומנים היטב, חומרה יציבה. אך בעולם האמיתי דברים משתבשים: משקלים משתנים כשהמטען זז, מסילות מתבלות, הקרקע הופכת חלקה, או שכוחות כמו רוחות צד ומי זרימה דוחפים את הכלים מהמסלול. כשזה קורה, מפעיל יכול להזיז ג'ויסטיק קדימה ולראות את המכונה סוטה הצידה. המחברים מגדירים רובוט כ"ניתן להפעלה" כאשר התגובה שלו תואמת למה שאדם מצפה באופן סביר; בהפרעות חזקות הקשר הזה נשבר, מה שעלול להוביל לתאונות כמו ספינה החוסמת תעלה. האתגר הוא לשחזר במהירות את הקשר האינטואיטיבי בין פקודה לתנועה, גם כאשר ההפרעה לא נצפתה מראש.
שכבת למידה מעל מפקחים קיימים
במקום לעצב מחדש את בקר הרמה־נמוכה של הרובוט לכל תקלה אפשרית, החוקרים מוסיפים שכבת על־ גבוהה חדשה הנקראת FLAIR, קיצור של Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR מאזין לאותן פקודות שהמפעיל האנושי שולח—כמו "לך קדימה" או "פנה שמאלה"—ומצפה כיצד הרובוט אכן נע באמצעות חיישנים על־לוח. על ידי השוואת התנועה המיועדת לזו הממשית, הוא לומד תיאור מתמטי קומפקטי של מה שמפריע למכונה כעת, כמו אחיזה מוחלשת במסילה אחת או דחיפה רוחית הצידה. כל 225 מילישניות הוא מעדכן את התמונה הפנימית הזאת ומתאים במעט את הפקודות לפני שליחתם לבקר המקורי. כדי לשמור על הבנתיות לבני אדם, FLAIR מייצג את ההפרעה הכללית בעקומות פשוטות במקום רשתות עמוקות אטומות, והוא יכול להדגיש היכן במרחב או באילו כיוונים כרגע הכי מסוכן. 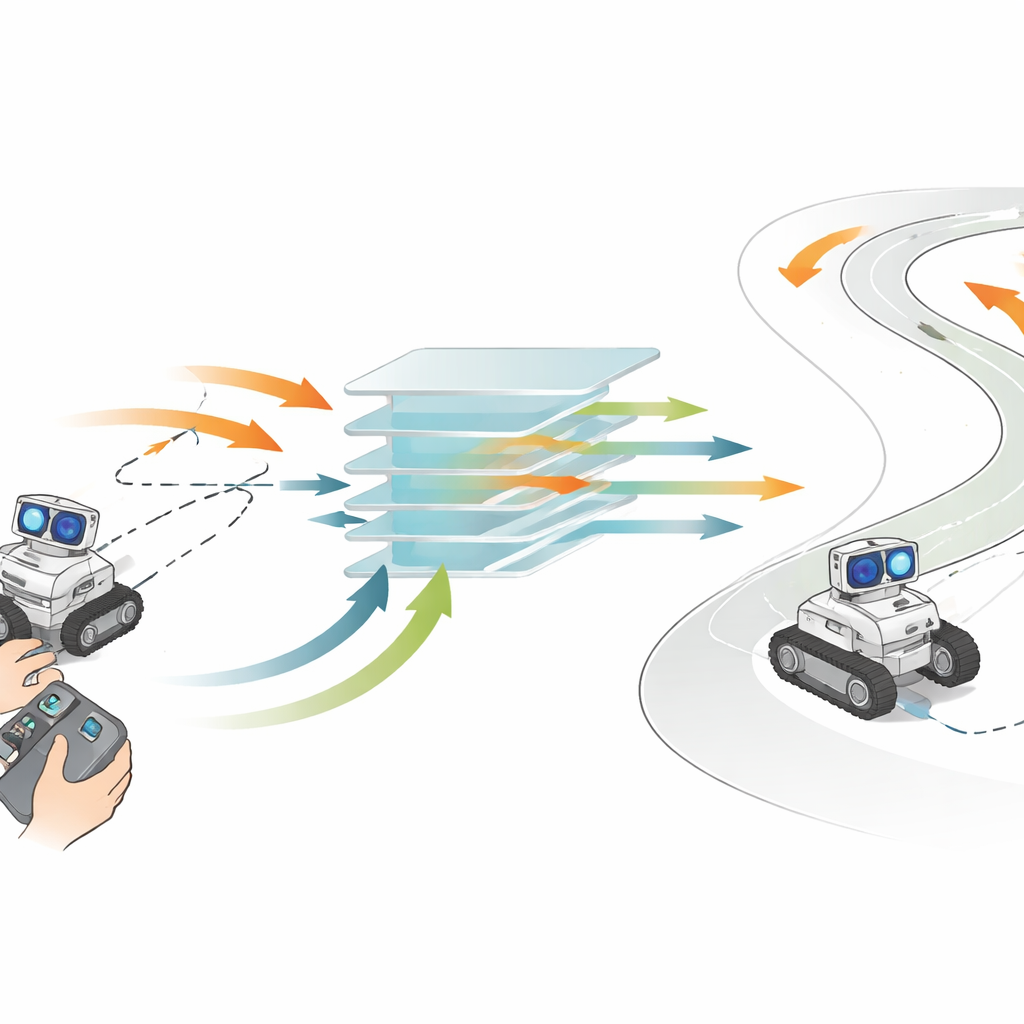
בדיקות על שיפועים, עקומות וסערות מלאכותיות
כדי לבחון את יכולות FLAIR, הצוות ערך למעלה מ‑700 ניסויים עם רובוט מסולל על מסלולי בדיקה פנימיים. מסלול אחד כלל עקומות צורת S צמודות; אחר שילב שיפוע חלק עם קטע רוח מדומה שבו מאווררים חיצוניים דחפו את הרובוט הצידה; שלישי הוסיף מהמורות ומכשולים כדי להזיז את החיישנים ולהכניס רעש נוסף. החוקרים סימולצו סוגים שונים של תקלות: נזק סטטי (כמו מסילה מוחלשת קבועה), נזק דינמי ששינה עם הזמן, ואפקטים תלויי־מצב שבהם ההפרעה תלויה במיקום או בכיוון, מה שמדמה תופעות אמיתיות כגון כוחות ברנולי המציתים סירות לקירות התעלה. נוהג אוטומטי עקב אחר אותם מסלולים עם ובלי FLAIR, והצוות השווה עד כמה מסלול הרובוט התאמה לפקודות וכמה זמן לקח להשלים כל סיבוב.
שיחזור שליטה מהר יותר משיטות קיימות
בכל מקטעי הבדיקה, FLAIR קיטן את אי‑ההתאמה בין התנועה המבוקשת לזו הממשית בכ‑שלושת רבעים והקטין את זמני ההקפה בכ‑אותו יחס בערך, מה שהביא את הביצועים קרוב למה שהיה ברובוט ללא הפרעה. על שיפוע מאתגר במיוחד עם החלקה מעורבת ונזק חומרתי הוא בפועל שיקם את הניתנות להפעלה במלואה, בעוד שבקרים אופטימליים ואדפטיביים סטנדרטיים הצליחו לכל היותר לחצי את השגיאה. קו בסיס של למידת חיזוק מקוונת נכשל לחלוטין, והפך למסוכן עוד לפני שהספיק להסתגל. FLAIR הוכיח גם עמידות כאשר ההפרעה השתנתה באמצע ריצה: הוא זיהה שהמודל הקודם כבר לא תואם את המציאות, ניקה את זיכרונו ולמד מחדש תיאור חדש בתוך שניות, ושמר על יכולת ההיגוי של הרובוט כשהתנאים השתנו. האסטרטגיה חלה גם על רובוט מדומה בעל שישה רגליים ורב מפרקים, שבו FLAIR סייע לפצות על רגל מוחלשת.
להראות מה הרובוט "מרגיש"
מעבר לשמירה על מסלול, FLAIR מספק לצופה חלון אל עולמו של הרובוט. מאחר שהוא ממפה כיצד ההפרעות משתנות עם מיקום וכיוון, הוא יכול להראות למפעיל איפה הכוחות חזקים ביותר—ליד שפת התעלה, בזווית שיפוע מסוימת או מול הרוח. "אינטרוספקציה" זו הופכת את המערכת לכלי אבחון, המרמז אם הבעיה נובעת משחיקה, משטח או מדחיפה חיצונית, ומציע דרכי מסלול בטוחות שמתחמקות מאזורי סיכון גבוהים. חשוב לציין, השיטה נשענת רק על החיישנים הקיימים והמחשב על‑לוח של הרובוט, כך שהיא יכולה לפעול בשטח ללא חיבורי ענן או נתוני אימון שנאספו מראש.
מה זה אומר לעולם הרובוטיקה היומיומי
המחקר מדגים ששכבת למידה קלה משקל יכולה להפוך רובוטים לעמידים יותר להפתעות, מבלי צורך במודלים מדויקים של כל הפרעה אפשרית. כל עוד הכוחות התיקוניים נמצאים בתוך מה שהמנועים יכולים לספק פיזית, FLAIR יכול במהירות ללמוד מחדש איך לתרגם פקודות אנושיות לפעולות נמוכות‑רמה נכונות, גם בשטח קשה ותנאים משתנים. עבור אנשי מקצוע וחובבים כאחד, משמעות הדבר היא שרכבי קרקע עתידיים, רובוטי משלוחים או כלי חקר עשויים להתנהג יותר ככלים מהימנים—להמשיך "לעשות את מה שהתכוונת" כשהסביבה מתנהגת באופן בעייתי, ולספק רמזים כשהגבולות נתקלים, במקום להסתחרר ולהסיט פתאום מהמסלול.
ציטוט: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
מילות מפתח: חוסן רובוטי, בקרת למידה מקוונת, רכבים אוטונומיים, שיקום מפני נזק לרובוט, רובוטיקה אדפטיבית