Clear Sky Science · it
Rimettere i robot in carreggiata ricostituendo il controllo nelle situazioni impreviste con apprendimento online
Perché mantenere il controllo dei robot è importante
I robot stanno uscendo dai pavimenti delle fabbriche e si stanno spostando in ambienti affollati e imprevedibili: strade cittadine, fattorie, zone di disastro e persino vie di navigazione. In questi contesti, una raffica di vento improvvisa, una chiazza di ghiaccio o una ruota danneggiata possono far comportare un robot in modi che i suoi progettisti non avevano previsto, mettendo a rischio persone, proprietà e missioni. Questo articolo presenta FLAIR, un componente aggiuntivo di apprendimento rapido che aiuta i robot a rimanere sotto controllo umano quando accade l’imprevisto, senza dover ridisegnare da zero i loro meccanismi interni. 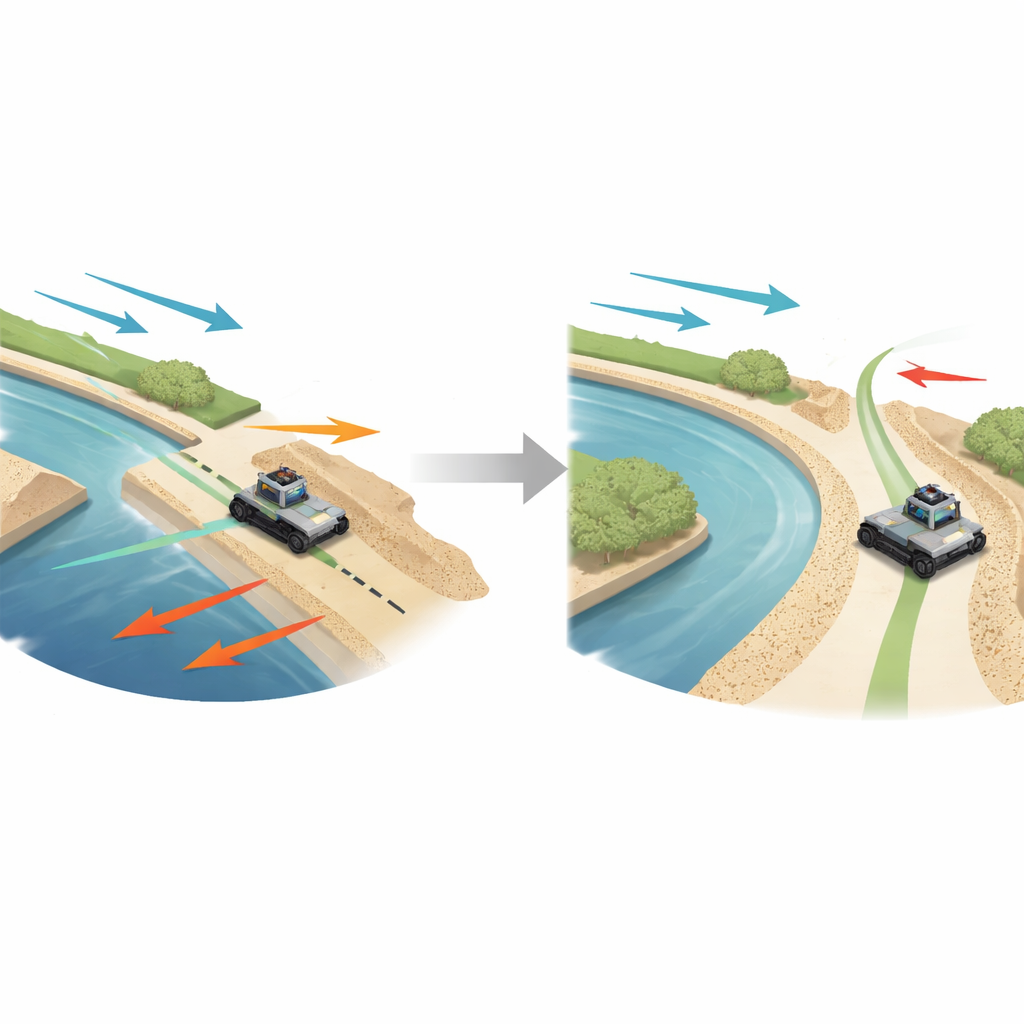
I robot contro il mondo reale
La maggior parte dei robot e dei veicoli intelligenti è tarata per condizioni che gli ingegneri possono prevedere e codificare: pavimenti asciutti in un magazzino, strade ben segnate, hardware stabile. Nel mondo reale, però, le cose vanno storte: il carico si sposta, le tracce si consumano, il terreno diventa scivoloso, o forze come venti laterali e flussi d’acqua deviano i veicoli dalla rotta. Quando ciò accade, un operatore può muovere il joystick in avanti e vedere la macchina scivolare lateralmente. Gli autori definiscono un robot «operabile» quando la sua risposta corrisponde a ciò che una persona si aspetta ragionevolmente; in presenza di forti perturbazioni quel legame si rompe, portando ad incidenti come una nave incagliata che sbarrichi un canale. La sfida è ripristinare rapidamente questo legame intuitivo tra comando e moto, anche quando la perturbazione non era stata prevista in anticipo.
Uno strato di apprendimento sopra i controller esistenti
Invece di ridisegnare il controller di basso livello del robot per ogni possibile imprevisto, i ricercatori hanno aggiunto un nuovo strato di alto livello chiamato FLAIR, acronimo di Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR ascolta gli stessi comandi inviati da un operatore umano — come «vai avanti» o «gira a sinistra» — e osserva come il robot si muove effettivamente tramite sensori di bordo. Confrontando il moto voluto con quello reale, apprende una descrizione matematica compatta di ciò che sta attualmente disturbando la macchina, per esempio una ridotta aderenza su una traccia o una spinta laterale del vento. Ogni 225 millisecondi aggiorna questa rappresentazione interna e aggiusta lievemente i comandi prima di passarli al controller originale. Per mantenere il sistema comprensibile agli umani, FLAIR rappresenta la perturbazione globale con curve semplici anziché reti profonde opache, e può evidenziare dove nello spazio o in quali direzioni il rischio è attualmente maggiore. 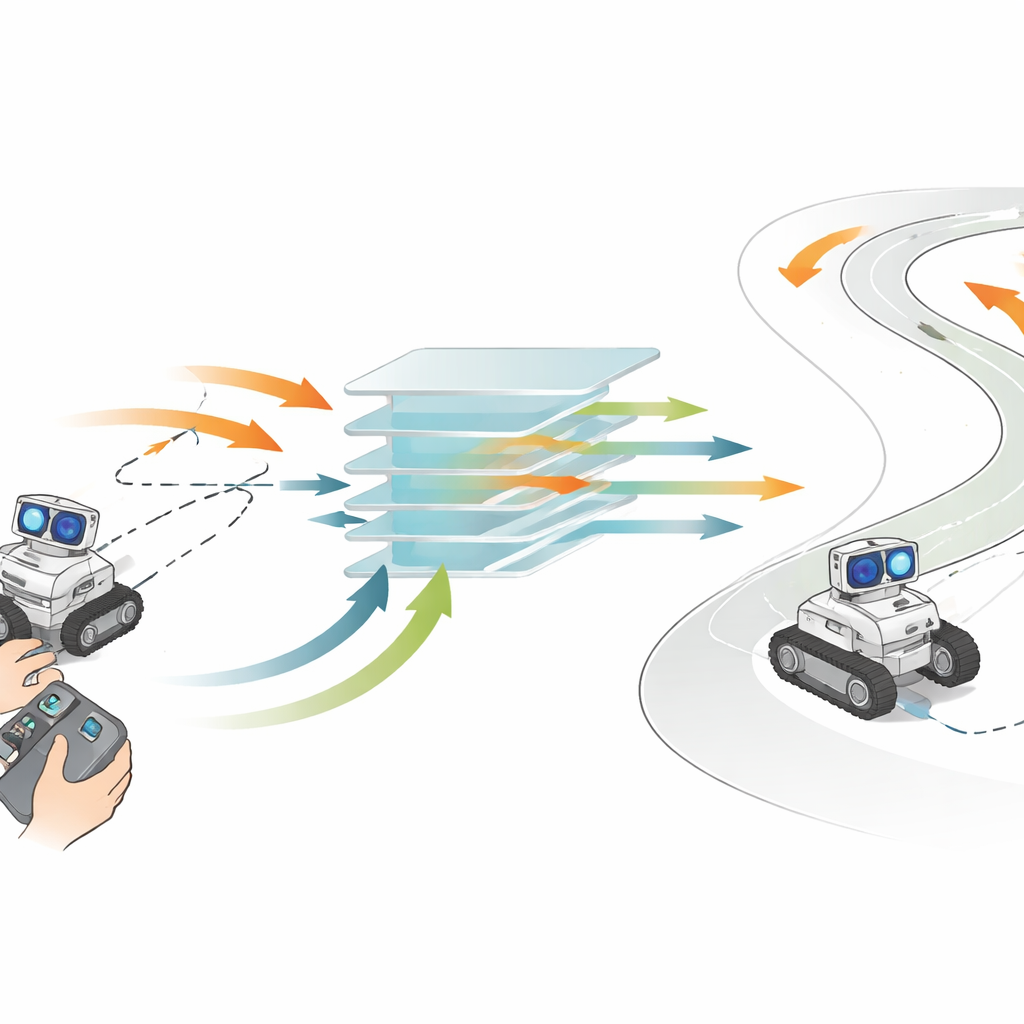
Test sui robot su rampe, curve e tempeste artificiali
Per sondare le capacità di FLAIR, il team ha condotto oltre 700 esperimenti con un robot cingolato su piste di prova indoor. Un percorso presentava curve a S strette; un altro combinava una rampa scivolosa con una sezione di vento simulato dove ventilatori esterni spingevano il robot lateralmente; un terzo aggiungeva dossi e ostacoli per scuotere i sensori e introdurre rumore extra. I ricercatori hanno simulato diversi tipi di guasto: danno statico (come una traccia permanentemente indebolita), danno dinamico che cambiava nel tempo, ed effetti dipendenti dallo stato in cui la perturbazione dipendeva da posizione o direzione, riecheggiando fenomeni reali come le forze di Bernoulli che attirano le navi verso le pareti di un canale. Un pilota automatico ha seguito gli stessi percorsi con e senza FLAIR, e il team ha confrontato quanto il percorso del robot corrispondesse ai comandi e quanto tempo servisse per completare ogni circuito.
Recuperare il controllo più rapidamente dei metodi esistenti
Su tutte le sezioni di prova, FLAIR ha ridotto la discrepanza tra moto comandato e moto reale di circa i tre quarti e ha diminuito i tempi sul giro di una frazione simile, portando le prestazioni vicine a quelle di un robot non disturbato. Su una rampa particolarmente impegnativa con scivolamento misto e danni all’hardware, ha effettivamente ripristinato la piena operabilità, mentre controller ottimali e adattativi standard al massimo hanno dimezzato l’errore. Un baselines di apprendimento per rinforzo online è invece fallito apertamente, diventando non sicuro prima di potersi adattare. FLAIR si è dimostrato robusto anche quando la perturbazione è cambiata a metà corsa: ha rilevato che il suo modello precedente non corrispondeva più alla realtà, ha svuotato la memoria e ha riapprreso una nuova descrizione in pochi secondi, mantenendo il robot governabile anche al variare delle condizioni. La stessa strategia è stata applicata a un robot simulato a sei zampe con molte articolazioni, dove FLAIR ha aiutato a compensare una zampa indebolita.
Vedere ciò che il robot percepisce
Oltre a mantenere i robot in carreggiata, FLAIR offre una finestra sul loro mondo. Poiché modella come le perturbazioni variano con posizione e direzione, può mostrare all’operatore dove le forze sono più forti — vicino al bordo di un canale, a un certo angolo di rampa o quando il robot è rivolto controvento. Questa «introspezione» trasforma il sistema in uno strumento diagnostico, suggerendo se il problema è probabilmente usura, terreno o una spinta esterna, e indicando percorsi più sicuri che evitino regioni ad alto rischio. È importante che il metodo si affidi solo ai sensori esistenti del robot e al suo computer di bordo, quindi può funzionare sul campo senza connessioni cloud o dati di addestramento pre‑raccolti.
Cosa significa per la robotica di tutti i giorni
Lo studio dimostra che uno strato di apprendimento leggero può rendere i robot molto più resilienti alle sorprese, senza modelli perfetti di ogni possibile perturbazione. Finché le forze correttive rimangono entro ciò che i motori possono fornire fisicamente, FLAIR può riapprendere rapidamente come tradurre i comandi umani nelle giuste azioni di basso livello, anche su terreni accidentati e in condizioni variabili. Per i non esperti, questo significa che futuri veicoli terrestri, robot per consegne o macchine esplorative potrebbero comportarsi più come strumenti fidati — continuando a «fare quello che intendi» quando l’ambiente si comporta male, e offrendo indizi quando si raggiungono i limiti, invece di deviare improvvisamente dalla rotta.
Citazione: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Parole chiave: resilienza dei robot, controllo con apprendimento online, veicoli autonomi, recupero da danni nei robot, robotica adattativa