Clear Sky Science · fr
Remettre les robots sur la bonne voie en reconstituant le contrôle dans des situations imprévues grâce à l’apprentissage en ligne
Pourquoi il est crucial de garder les robots sous contrôle
Les robots quittent les ateliers et pénètrent dans des environnements encombrés et imprévisibles : rues urbaines, exploitations agricoles, zones sinistrées et même voies de navigation. Dans ces contextes, une rafale de vent, une plaque de verglas ou une roue endommagée peut amener un robot à se comporter d’une manière que ses concepteurs n’avaient pas prévue, mettant en danger des personnes, des biens et des missions. Cet article présente FLAIR, un module d’apprentissage rapide qui aide les robots à rester contrôlables par un humain lorsque l’imprévu survient, sans avoir à repenser intégralement leur architecture interne. 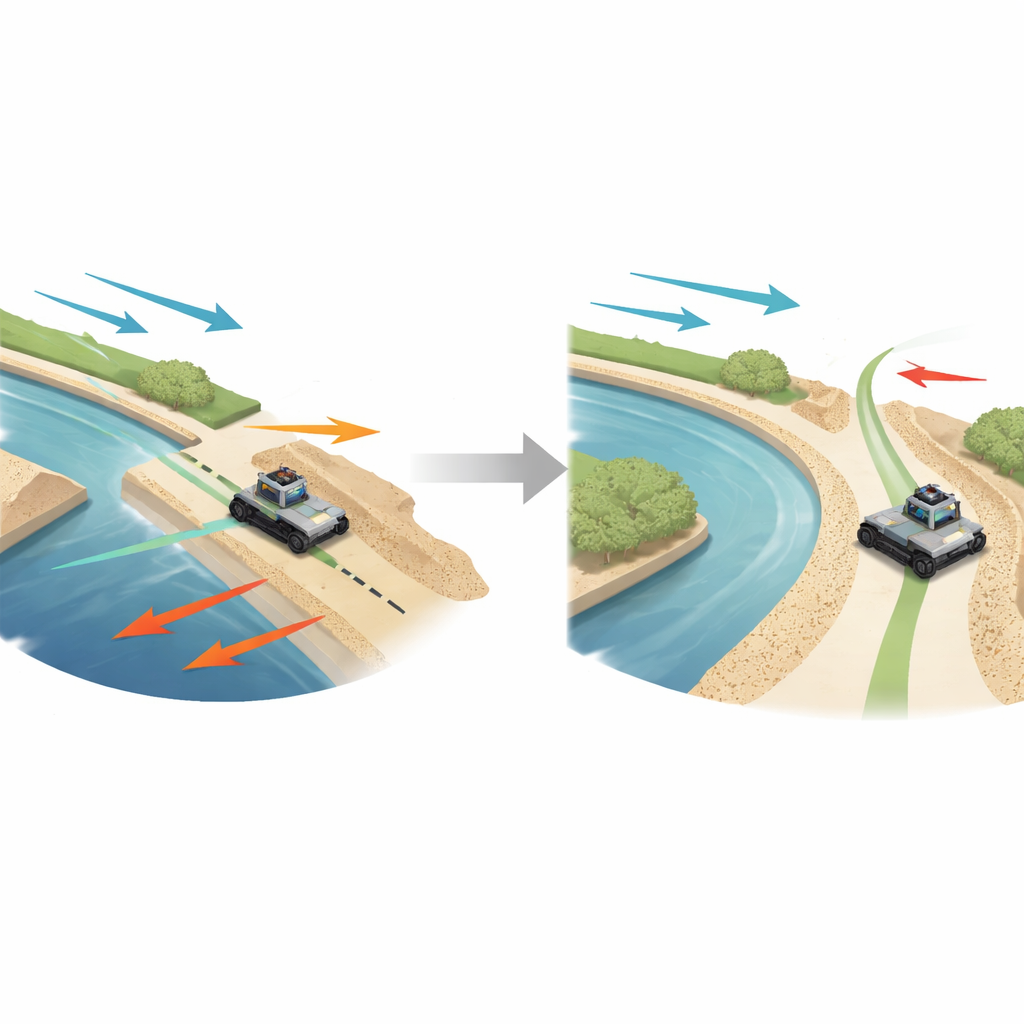
Les robots face au monde réel
La plupart des robots et des véhicules intelligents sont réglés pour des conditions que les ingénieurs peuvent prévoir et coder — sols secs dans un entrepôt, routes bien marquées, matériel stable. Dans le monde réel, cependant, les choses tournent mal : le chargement se déplace, les chenilles s’usent, le sol devient glissant, ou des forces comme des vents latéraux et des courants poussent les véhicules hors trajectoire. Quand cela arrive, un opérateur peut pousser le joystick vers l’avant et voir la machine dériver latéralement. Les auteurs définissent un robot comme « opérable » lorsque sa réponse correspond à ce qu’un humain attend raisonnablement ; sous de fortes perturbations, ce lien se rompt, entraînant des accidents, comme un navire qui cale dans un canal. Le défi est de restaurer rapidement ce lien intuitif entre commande et mouvement, même lorsque la perturbation n’a jamais été prévue à l’avance.
Une couche d’apprentissage ajoutée aux contrôleurs existants
Plutôt que de repenser le contrôleur bas niveau du robot pour chaque incident possible, les chercheurs ajoutent une nouvelle couche haute appelée FLAIR, pour Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR écoute les mêmes commandes qu’envoie un opérateur humain — par exemple « avance » ou « tourne à gauche » — et observe comment le robot se déplace réellement grâce aux capteurs embarqués. En comparant le mouvement voulu au mouvement réel, il apprend une description mathématique compacte de ce qui perturbe actuellement la machine, comme une adhérence réduite sur une chenille ou une poussée latérale du vent. Toutes les 225 millisecondes, il met à jour cette image interne et ajuste légèrement les commandes avant de les transmettre au contrôleur d’origine. Pour rester compréhensible par des humains, FLAIR représente la perturbation globale par des courbes simples plutôt que par des réseaux profonds opaques, et il peut indiquer où dans l’espace ou dans quelles directions le risque est actuellement le plus élevé. 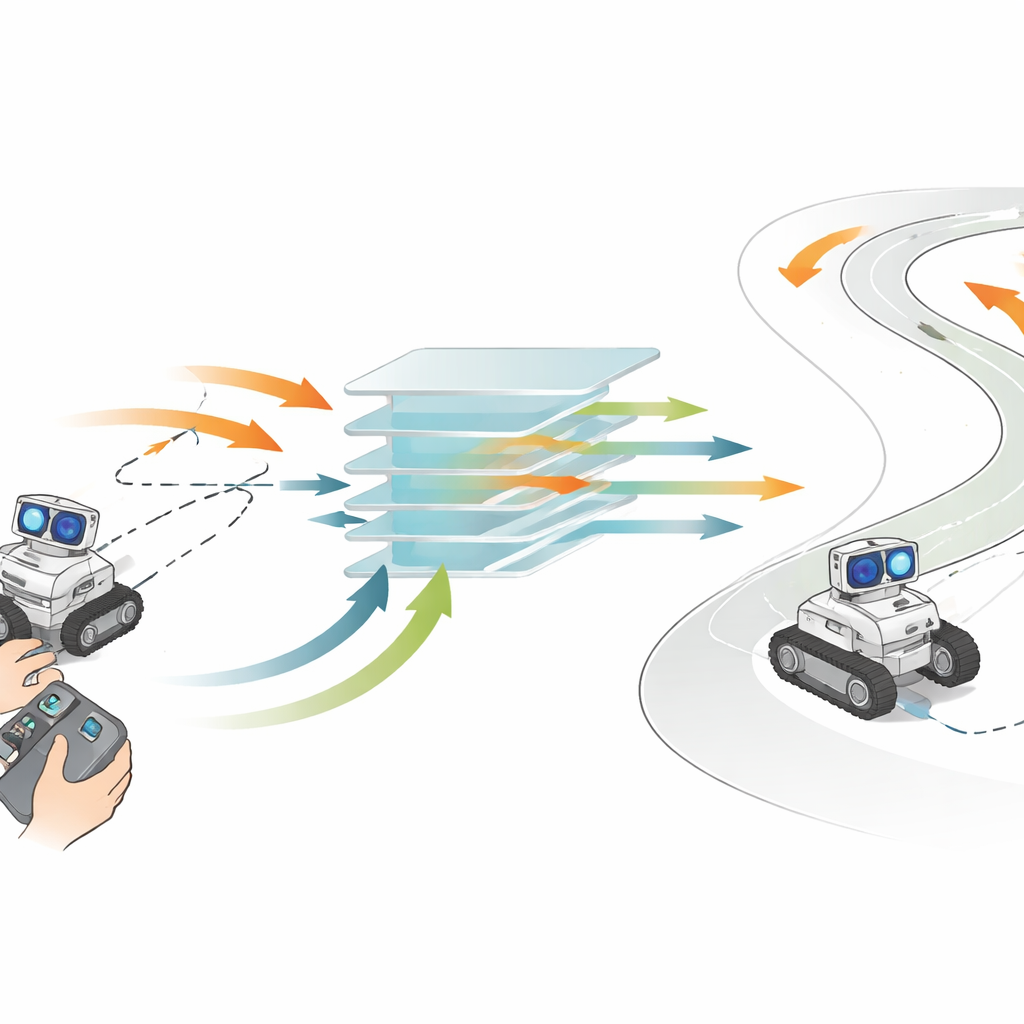
Tester les robots sur rampes, courbes et tempêtes artificielles
Pour évaluer les capacités de FLAIR, l’équipe a réalisé plus de 700 expériences avec un robot à chenilles sur des circuits d’essai intérieurs. Un parcours comportait des virages serrés en S ; un autre combinait une rampe glissante avec une section simulant du vent où des ventilateurs externes poussaient le robot latéralement ; un troisième ajoutait bosses et obstacles pour secouer les capteurs et introduire du bruit supplémentaire. Les chercheurs ont simulé différents types de problèmes : dommages statiques (comme une chenille affaiblie de façon permanente), dommages dynamiques évoluant dans le temps, et effets dépendant de l’état où la perturbation variait selon la position ou l’orientation, rappelant des phénomènes réels comme les forces de Bernoulli qui attirent les navires vers les parois d’un canal. Un pilote automatique a suivi les mêmes trajectoires avec et sans FLAIR, et l’équipe a comparé la proximité entre la trajectoire du robot et les commandes ainsi que le temps nécessaire pour compléter chaque circuit.
Rétablir le contrôle plus rapidement que les méthodes existantes
Sur l’ensemble des sections de test, FLAIR a réduit le décalage entre mouvement commandé et mouvement réel d’environ trois quarts et a diminué les temps de tour à peu près dans la même proportion, rapprochant les performances de celles d’un robot non perturbé. Sur une rampe particulièrement difficile combinant glissement et dommage matériel, il a efficacement rétabli une opérabilité complète, alors que des contrôleurs optimaux et adaptatifs classiques ne parvenaient au mieux qu’à diviser l’erreur par deux. Une ligne de base utilisant l’apprentissage par renforcement en ligne a échoué complètement, devenant dangereuse avant de pouvoir s’adapter. FLAIR s’est également montré robuste lorsque la perturbation changeait en cours d’essai : il détectait que son modèle précédent ne correspondait plus à la réalité, vidait sa mémoire et réapprenait une nouvelle description en quelques secondes, gardant le robot dirigeable malgré l’évolution des conditions. La même stratégie s’est avérée applicable à un robot simulé à six pattes et de nombreux articulations, où FLAIR a aidé à compenser une patte affaiblie.
Voir ce que le robot ressent
Au‑delà du maintien de la trajectoire, FLAIR offre une fenêtre sur le monde perçu par les robots. Parce qu’il modélise la façon dont les perturbations varient en fonction de la position et de la direction, il peut montrer à un opérateur où les forces sont les plus fortes — près du bord d’un canal, à un angle de rampe particulier ou lorsqu’on fait face au vent. Cette « introspection » transforme le système en un outil de diagnostic, donnant des indications sur la nature probable du problème — usure, terrain ou poussée externe — et suggérant des trajectoires plus sûres qui évitent les zones à haut risque. Fait important, la méthode s’appuie uniquement sur les capteurs et l’ordinateur embarqués du robot, elle peut donc fonctionner sur le terrain sans connexions cloud ou données d’entraînement pré‑collectées.
Ce que cela change pour la robotique de tous les jours
L’étude montre qu’une couche d’apprentissage légère peut rendre les robots beaucoup plus résilients face aux surprises, sans modèles parfaits de chaque perturbation possible. Tant que les forces correctrices restent dans les capacités physiques des moteurs, FLAIR peut rapidement réapprendre à traduire les commandes humaines en actions bas‑niveau appropriées, même sur un terrain accidenté et dans des conditions changeantes. Pour les non‑experts, cela signifie que les futurs véhicules terrestres, robots de livraison ou machines d’exploration pourraient se comporter davantage comme des outils fiables — continuant à « faire ce que vous voulez » quand l’environnement fait défaut, et fournissant des indices lorsque les limites sont atteintes, au lieu de dévier soudainement de leur trajectoire.
Citation: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Mots-clés: résilience des robots, contrôle par apprentissage en ligne, véhicules autonomes, récupération après dommage robotique, robotique adaptative