Clear Sky Science · nl
Robots weer op koers krijgen door controle te herstellen in onverwachte situaties met online leren
Waarom het belangrijk is dat robots onder controle blijven
Robots verlaten de fabrieksvloer en komen terecht op drukke, onvoorspelbare locaties: stadsstraten, boerderijen, rampgebieden en zelfs scheepvaartroutes. In deze omgevingen kan een plotselinge windvlaag, een ijsplek of een beschadigd wiel een robot anders laten reageren dan zijn ontwerpers voorzien hadden, waardoor mensen, eigendommen en missies in gevaar komen. Dit artikel introduceert FLAIR, een snel lerende toevoeging die robots helpt onder menselijke controle te blijven als het onverwachte gebeurt, zonder dat hun interne besturing van bovenaf opnieuw ontworpen hoeft te worden. 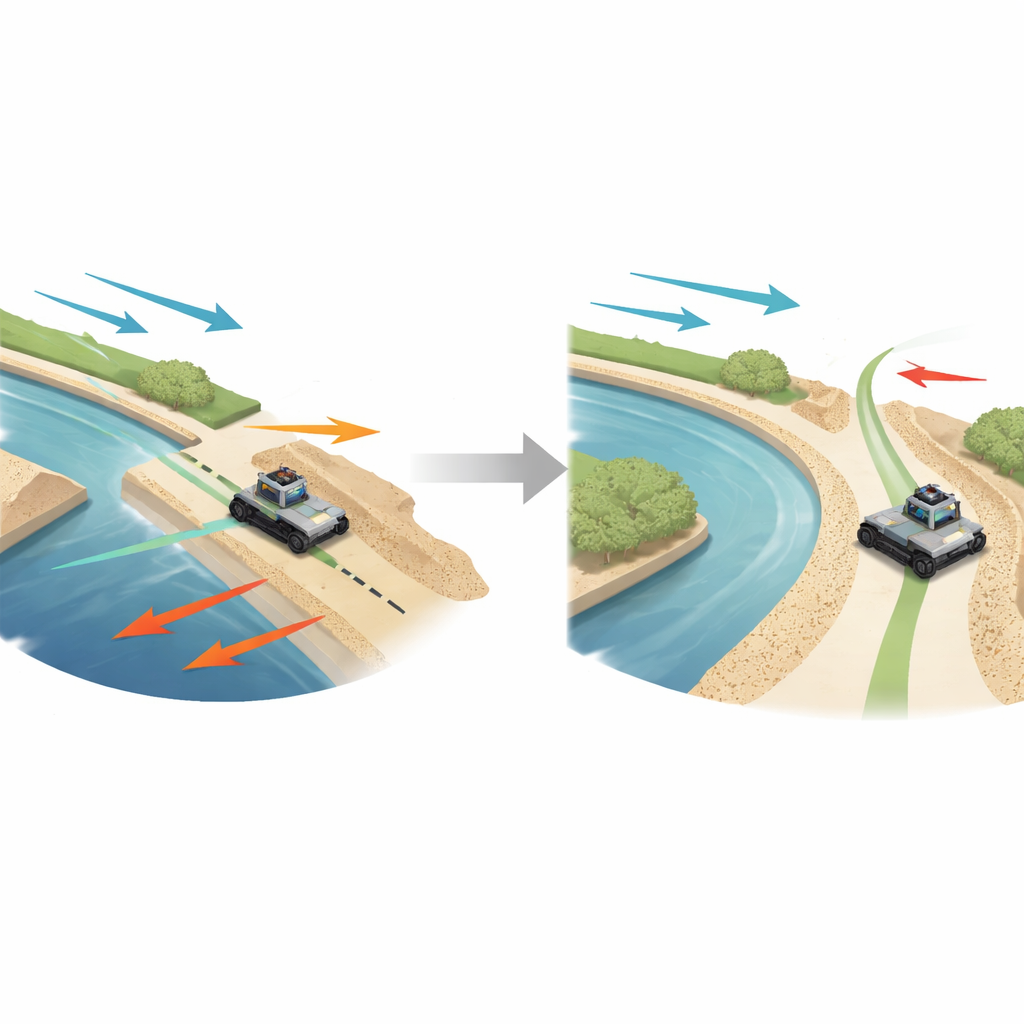
Robots versus de echte wereld
De meeste robots en slimme voertuigen zijn afgestemd op omstandigheden die ingenieurs kunnen voorzien en vastleggen—droge vloeren in een magazijn, duidelijk gemarkeerde wegen, stabiele hardware. In de echte wereld gaan dingen echter mis: gewicht verschuift als lading beweegt, rupsbanden slijten, ondergrond wordt glad, of krachten zoals zijwind en waterstromen duwen voertuigen van hun koers. Dan kan een operator de joystick naar voren duwen en zien dat de machine zijwaarts afdrijft. De auteurs definiëren een robot als “bedienbaar” wanneer zijn reactie overeenkomt met wat een mens redelijkerwijs verwacht; bij sterke verstoringen raakt die verbinding verbroken, wat leidt tot ongevallen zoals een schip dat zichzelf dwars over een kanaal vastzet. De uitdaging is om deze intuïtieve link tussen commando en beweging snel te herstellen, zelfs wanneer de verstoring van tevoren nooit was voorzien.
Een leertaak bovenop bestaande controllers
In plaats van de laag-niveau besturing van de robot voor elk mogelijk euvel te herontwerpen, zetten de onderzoekers een nieuwe hoog-niveau laag op, FLAIR, een afkorting voor Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR luistert naar dezelfde commando’s die een menselijke operator stuurt—zoals “ga vooruit” of “sla linksaf”—en vergelijkt met behulp van onboard sensoren hoe de robot daadwerkelijk beweegt. Door de bedoelde beweging met de werkelijke beweging te vergelijken, leert het een compacte wiskundige beschrijving van wat de machine op dat moment verstoort, zoals verminderde grip op één rupsband of een zijwaartse windstoot. Elke 225 milliseconden werkt het deze interne afbeelding bij en past het de commando’s licht aan voordat ze naar de oorspronkelijke controller gaan. Om het systeem voor mensen begrijpelijk te houden, representeert FLAIR de totale verstoring met eenvoudige krommen in plaats van ondoorzichtige deep‑netwerken, en het kan laten zien waar in de ruimte of in welke richtingen momenteel het grootste risico bestaat. 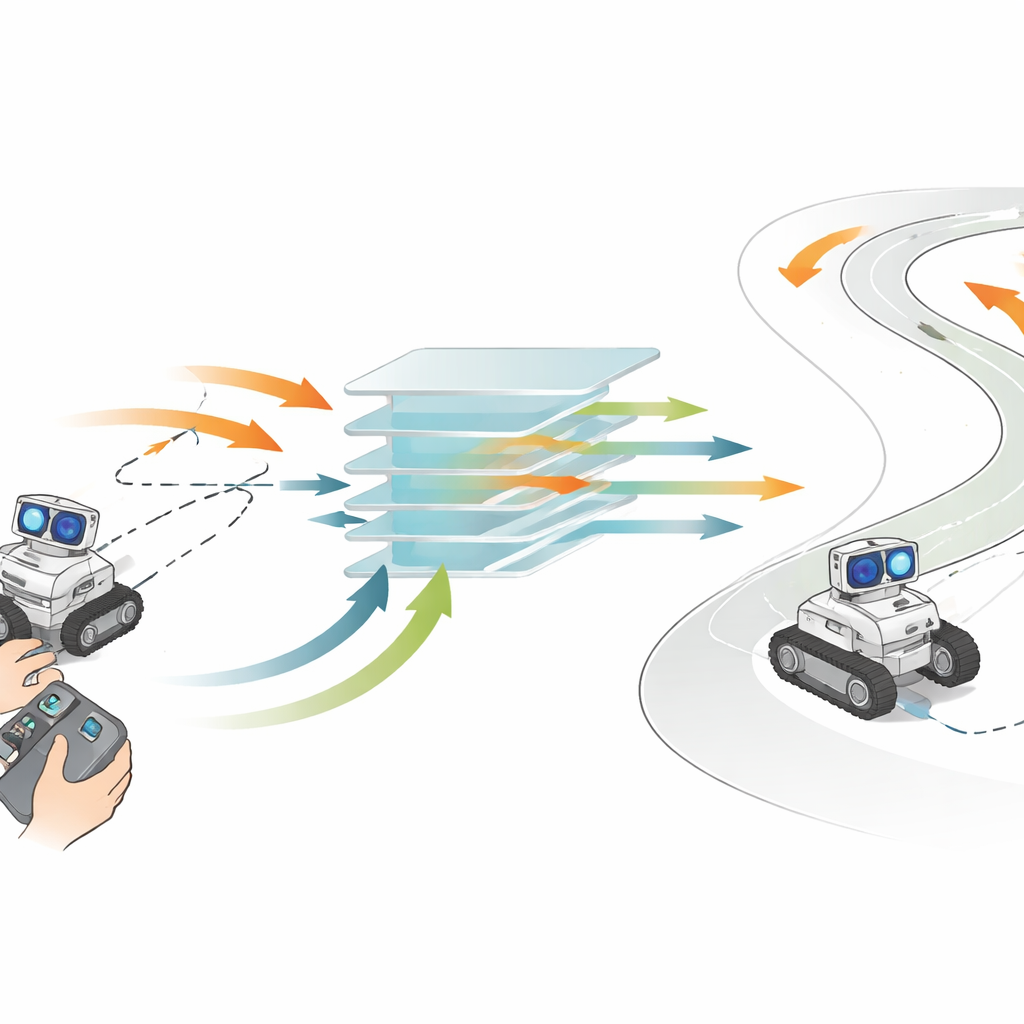
Robots testen op hellingen, bochten en kunstmatige stormen
Om FLAIR’s capaciteiten te onderzoeken, voerde het team meer dan 700 experimenten uit met een rupsrobot op binnen testcircuits. Het ene parcours had krappe S‑vormige bochten; een ander combineerde een gladde helling met een nagebouwde windzone waar externe ventilatoren de robot zijwaarts duwden; een derde voegde hobbels en obstakels toe om de sensoren te laten schudden en extra ruis in te brengen. De onderzoekers simuleerden verschillende soorten problemen: statische schade (zoals een blijvend verzwakte rups), dynamische schade die in de tijd veranderde, en toestand‑afhankelijke effecten waarbij de verstoring afhankelijk was van positie of koers, wat echte fenomenen weerspiegelt zoals Bernoulli‑krachten die schepen naar kanaalwanden trekken. Een automatische bestuurder volgde dezelfde paden met en zonder FLAIR, en het team vergeleek hoe nauwkeurig het pad van de robot overeenkwam met de commando’s en hoe lang het duurde om elk circuit te voltooien.
Sneller controle herstellen dan bestaande methoden
Over alle testsecties verminderde FLAIR de mismatch tussen gevraagde en daadwerkelijke beweging met ongeveer driekwart en verkortte de rondetijden grofweg in dezelfde mate, waardoor de prestatie dicht bij die van een ongestoorde robot kwam. Op een bijzonder uitdagende helling met gecombineerd slippen en hardware schade herstelde het effectief volledige bedienbaarheid, terwijl standaard optimale en adaptieve controllers hooguit de fout halveerden. Een online reinforcement‑learning baseline faalde volledig en werd onveilig voordat hij zich kon aanpassen. FLAIR bleek ook robuust wanneer de verstoring halverwege de rit veranderde: het detecteerde dat zijn vorige model niet meer met de realiteit overeenkwam, maakte zijn geheugen leeg en leerde in enkele seconden een nieuwe beschrijving, waardoor de robot bestuurbaar bleef ook bij veranderende omstandigheden. Dezelfde strategie werkte ook in simulatie op een zesbenige robot met veel gewrichten, waar FLAIR hielp compenseren voor een verzwakte poot.
Zien wat de robot voelt
Naast het op koers houden van robots biedt FLAIR ook een venster op hun beleving. Omdat het modelleert hoe verstoringen variëren met positie en richting, kan het een operator laten zien waar krachten het sterkst zijn—bijvoorbeeld nabij de rand van een kanaal, onder een bepaalde hellingshoek of bij tegenwind. Deze “introspectie” verandert het systeem in een diagnostisch hulpmiddel, dat aanwijzingen geeft of het probleem waarschijnlijk slijtage, terrein of een externe duw betreft, en veiligere routes suggereert die risicovolle gebieden vermijden. Belangrijk is dat de methode alleen steunt op de bestaande sensoren en boordcomputer van de robot, zodat hij in het veld kan draaien zonder cloudverbindingen of vooraf verzamelde trainingsdata.
Wat dit betekent voor alledaagse robotica
De studie toont aan dat een lichte leerlaag robots veel veerkrachtiger kan maken tegen verrassingen, zonder perfecte modellen van elke mogelijke verstoring. Zolang de corrigerende krachten binnen de fysieke mogelijkheden van de motoren blijven, kan FLAIR snel opnieuw leren hoe menselijke commando’s vertaald moeten worden naar de juiste laag‑niveaubedieningen, zelfs op ruw terrein en bij veranderende omstandigheden. Voor niet‑experts betekent dit dat toekomstige grondvoertuigen, bezorgrobots of verkenningsmachines zich meer als betrouwbare hulpmiddelen kunnen gedragen—doorgaan met “doen wat u bedoelt” wanneer de omgeving zich misdraagt, en aanwijzingen geven wanneer de grenzen worden bereikt, in plaats van plotseling van koers te raken.
Bronvermelding: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Trefwoorden: robot veerkracht, online leerbesturing, autonome voertuigen, robot schadeherstel, adaptieve robotica