Clear Sky Science · de
Roboter wieder auf Kurs bringen: Steuerung in unerwarteten Situationen mit Online‑Lernen rekonstituieren
Warum es wichtig ist, Roboter steuerbar zu halten
Roboter verlassen zunehmend die Fabrikhallen und bewegen sich in geschäftige, unvorhersehbare Umgebungen: Stadtstraßen, landwirtschaftliche Flächen, Katastrophengebiete und sogar Schifffahrtswege. In solchen Situationen kann eine plötzliche Windböe, eine Eisplatte oder ein beschädigtes Rad dazu führen, dass sich ein Roboter ganz anders verhält, als seine Entwickler es vorgesehen haben — und damit Menschen, Eigentum und Einsätze gefährden. Dieser Artikel stellt FLAIR vor, eine schnell lernende Zusatzschicht, die Robotern hilft, unter menschlicher Kontrolle zu bleiben, wenn das Unerwartete eintritt, ohne deren innere Steuerung vollständig neu entwerfen zu müssen. 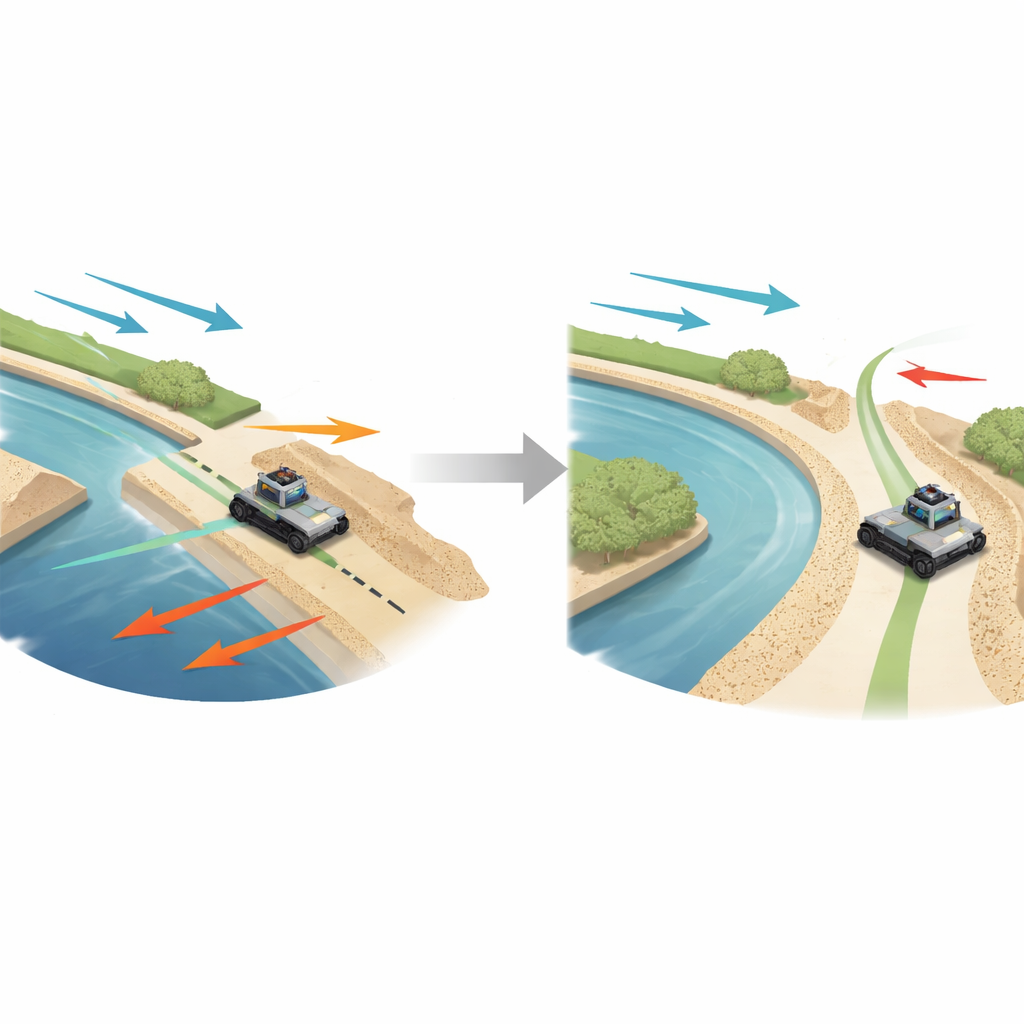
Roboter gegen die reale Welt
Die meisten Roboter und intelligenten Fahrzeuge sind für Bedingungen abgestimmt, die Ingenieure vorhersehen und kodieren können — trockene Böden in einem Lager, gut markierte Straßen, stabile Hardware. In der realen Welt dagegen geht vieles schief: Ladungsverschiebungen verändern das Gewicht, Gleise oder Ketten nutzen sich ab, der Untergrund wird rutschig, oder äußere Kräfte wie Seitenwind und Wasserströme treiben Fahrzeuge aus der Bahn. Dann kann ein Bediener den Joystick nach vorn bewegen und beobachten, wie die Maschine seitlich abdriftet. Die Autorinnen und Autoren definieren einen Roboter als „bedienbar“, wenn seine Reaktion dem entspricht, was eine Person vernünftigerweise erwartet; bei starken Störungen bricht diese Verbindung zusammen und es kommt zu Unfällen, etwa wenn ein Schiff sich quer über einen Kanal verkeilt. Die Herausforderung besteht darin, diese intuitive Verknüpfung zwischen Befehl und Bewegung schnell wiederherzustellen, auch wenn die Störung vorher nie antizipiert wurde.
Eine Lernschicht über bestehenden Reglern
Anstatt den niederfrequenten Controller des Roboters für jedes mögliche Missgeschick neu zu entwerfen, bauen die Forschenden eine neue hochrangige Schicht darauf auf, genannt FLAIR (Fast Learning‑Based Adaptation for Immediate Recovery). FLAIR horcht auf dieselben Befehle, die ein menschlicher Bediener sendet — etwa „vorwärts“ oder „links drehen“ — und beobachtet mithilfe der Bordsensoren, wie sich der Roboter tatsächlich bewegt. Durch den Vergleich von beabsichtigter und realer Bewegung lernt es eine kompakte mathematische Beschreibung dessen, was die Maschine gerade stört, etwa verminderter Halt einer Kette oder ein seitlicher Windstoß. Alle 225 Millisekunden aktualisiert es dieses interne Bild und passt die Befehle leicht an, bevor sie an den ursprünglichen Controller weitergereicht werden. Um das System für Menschen nachvollziehbar zu halten, repräsentiert FLAIR die Gesamtstörung mit einfachen Kurven statt mit undurchsichtigen tiefen Netzwerken und kann hervorheben, wo im Raum oder in welchen Richtungen aktuell besonderes Risiko besteht. 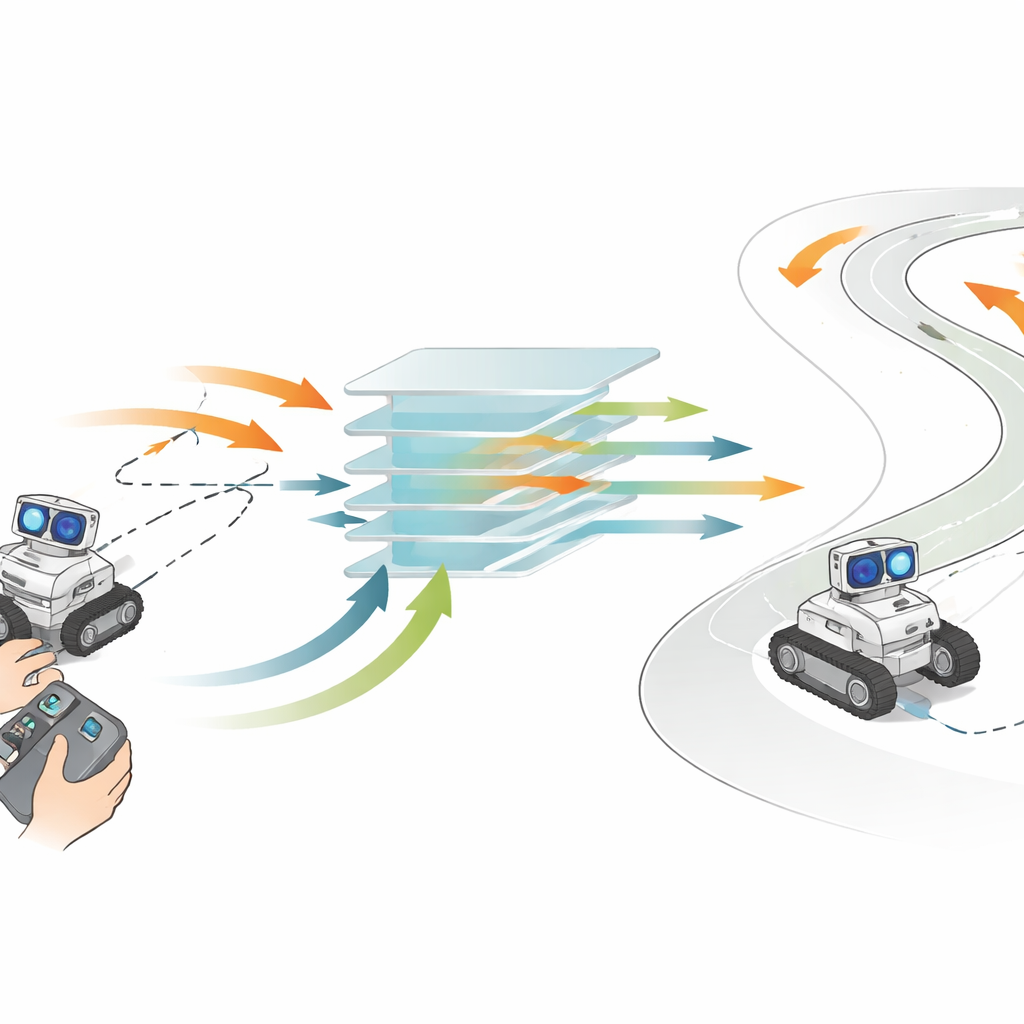
Roboter auf Rampen, Kurven und künstlichen Stürmen testen
Um FLAIRs Fähigkeiten zu prüfen, führte das Team mehr als 700 Experimente mit einem Kettenroboter auf Indoor‑Teststrecken durch. Ein Parcours beinhaltete enge S‑förmige Kurven; ein anderer kombinierte eine rutschige Rampe mit einem Mock‑Windbereich, in dem externe Ventilatoren den Roboter seitlich schoben; ein dritter fügte Unebenheiten und Hindernisse hinzu, um die Sensoren zu erschüttern und zusätzliches Rauschen zu erzeugen. Die Forschenden simulierten verschiedene Störungsarten: statische Schäden (wie eine dauerhaft geschwächte Kette), dynamische Schäden, die sich über die Zeit änderten, und zustandsabhängige Effekte, bei denen die Störung von Position oder Kurs abhing — analog zu realen Phänomenen wie den Bernoulli‑Kräften, die Schiffe an Kanalwände ziehen. Ein automatischer Fahrer fuhr die gleichen Strecken mit und ohne FLAIR, und das Team verglich, wie gut die Roboterbahn den Befehlen folgte und wie lange jede Runde dauerte.
Kontrolle schneller wiederherstellen als bestehende Methoden
Über alle Testabschnitte senkte FLAIR die Diskrepanz zwischen befohlener und tatsächlicher Bewegung um etwa drei Viertel und verkürzte die Rundenzeiten ungefähr im gleichen Umfang, wodurch die Leistung an die eines ungestörten Roboters heranreichte. Auf einer besonders herausfordernden Rampe mit kombiniertem Rutschen und Hardware‑Schaden stellte es die volle Bedienbarkeit effektiv wieder her, während herkömmliche optimale und adaptive Regler bestenfalls den Fehler halbieren konnten. Eine Online‑Reinforcement‑Learning‑Baseline scheiterte vollständig und wurde unsicher, bevor sie sich anpassen konnte. FLAIR zeigte sich zudem robust, wenn die Störung mitten im Lauf wechselte: Es erkannte, dass sein vorheriges Modell nicht mehr zur Realität passte, löschte seinen Speicher und erlernte in Sekunden eine neue Beschreibung, sodass der Roboter steuerbar blieb, selbst wenn sich die Bedingungen veränderten. Die gleiche Strategie funktionierte auch in einer Simulation eines sechsgliedrigen Roboters mit vielen Gelenken, wo FLAIR half, ein geschwächtes Bein zu kompensieren.
Sehen, was der Roboter fühlt
Über das Aufrechterhalten des Kurses hinaus bietet FLAIR Einblicke in die Wahrnehmung des Roboters. Weil es modelliert, wie Störungen mit Position und Richtung variieren, kann es dem Bediener zeigen, wo die Kräfte am stärksten sind — nahe der Kanalkante, in einem bestimmten Rampenwinkel oder beim Gegenwind. Diese „Introspektion“ macht das System zu einem Diagnosewerkzeug, das Hinweise darauf gibt, ob das Problem wahrscheinlich Verschleiß, Terrain oder ein äußerer Stoß ist, und es kann sicherere Wege vorschlagen, die risikoreiche Bereiche meiden. Wichtig ist, dass die Methode nur die vorhandenen Sensoren und den Bordcomputer des Roboters nutzt, sodass sie im Feld ohne Cloud‑Verbindung oder vorab gesammelte Trainingsdaten laufen kann.
Was das für den Alltag mit Robotern bedeutet
Die Studie zeigt, dass eine leichte Lernschicht Roboter deutlich widerstandsfähiger gegen Überraschungen machen kann, ohne perfekte Modelle jeder denkbaren Störung zu benötigen. Solange die korrigierenden Kräfte innerhalb dessen liegen, was die Motoren physisch liefern können, kann FLAIR schnell neu lernen, wie menschliche Befehle in die richtigen niederfrequenten Aktionen übersetzt werden — selbst in unwegsamem Gelände und unter wechselnden Bedingungen. Für Laien bedeutet das, dass künftige Bodenfahrzeuge, Lieferroboter oder Erkundungsmaschinen eher wie verlässliche Werkzeuge agieren könnten: Sie tun weiterhin, was gemeint ist, wenn die Umgebung verrücktspielt, und liefern Hinweise, wenn Grenzen erreicht sind, statt plötzlich aus der Bahn zu geraten.
Zitation: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Schlüsselwörter: Roboterresilienz, Online‑Lernsteuerung, autonome Fahrzeuge, Roboter‑Schadenswiederherstellung, adaptive Robotik