Clear Sky Science · ar
إعادة توجيه الروبوتات عن طريق إعادة تشكيل التحكم في حالات غير متوقعة باستخدام التعلم عبر الإنترنت
لماذا الحفاظ على تحكم الروبوتات مهم
تخرج الروبوتات من أرضيات المصانع وتتحرك إلى أماكن مزدحمة وغير متوقعة: شوارع المدن، والمزارع، ومناطق الكوارث وحتى طرق الشحن. في هذه البيئات، قد يجعل هبوب مفاجئ للرياح أو بقعة جليد أو عجلة تالفة الروبوت يتصرف بطرق لم يخططها المصممون، مما يعرض الأشخاص والممتلكات والمهام للخطر. يقدم هذا المقال FLAIR، مكوّناً إضافياً سريع التعلم يساعد الروبوتات على البقاء تحت تحكم الإنسان عند وقوع المفاجآت، دون الحاجة لإعادة تصميم أجزائها الداخلية من الصفر. 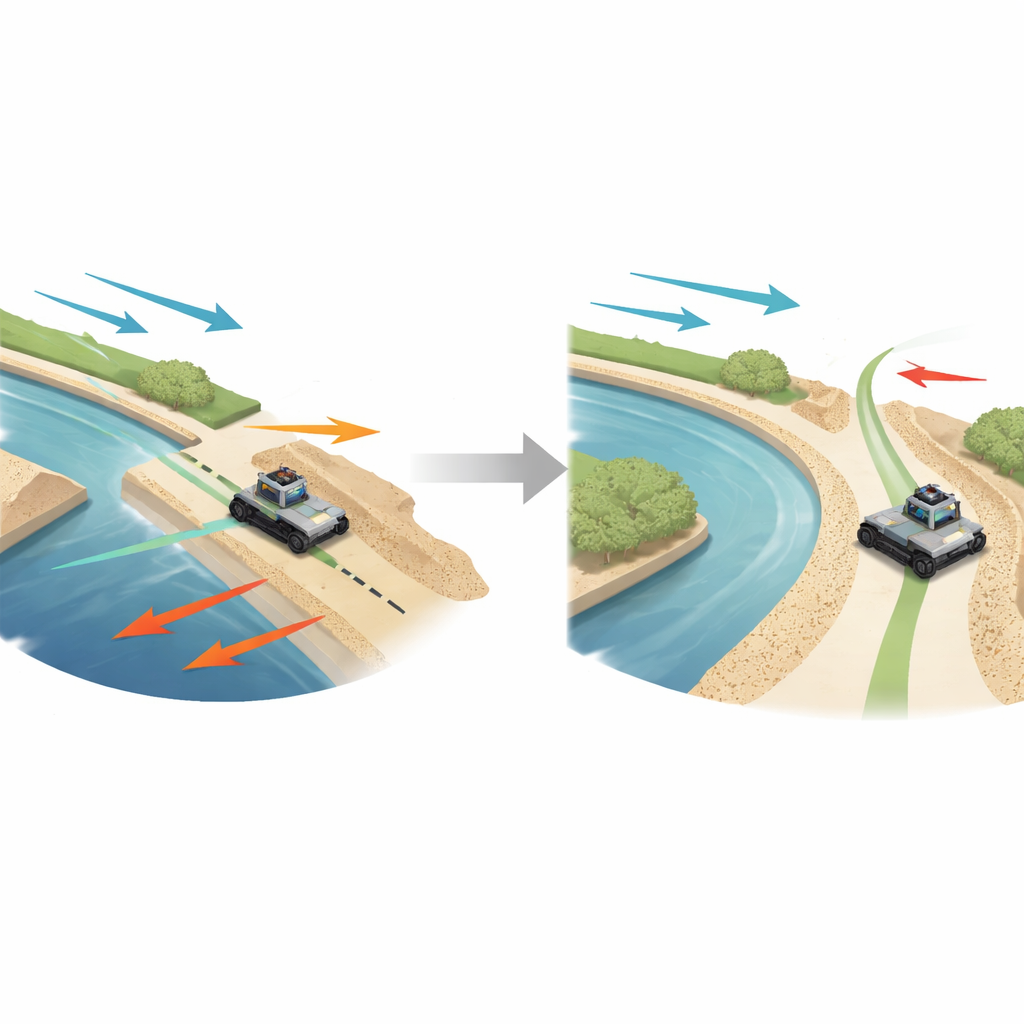
الروبوتات مقابل العالم الحقيقي
معظم الروبوتات والمركبات الذكية مُعدة لظروف يمكن للمهندسين التنبؤ بها وترميزها—أرضيات جافة في مستودع، طرق محددة جيداً، معدات مستقرة. لكن في العالم الحقيقي تسوء الأمور أحياناً: يتحول الوزن عند تحرك الحمولة، أو تتآكل المسارات، أو يصبح الأرض زلقة، أو تدفع قوى مثل الرياح الجانبية والمياه المركبات عن مسارها. عندما يحدث ذلك، قد يحرك المشغل ذراع التحكم للأمام ويشاهد الآلة تنجرف جانبياً بدلاً من الاستجابة المتوقعة. يعرّف المؤلفون الروبوت بأنه «قابل للتشغيل» عندما تتطابق استجابته مع ما يتوقعه الشخص بشكل معقول؛ تحت اضطرابات شديدة ينكسر هذا الارتباط، مما يؤدي إلى حوادث مثل جنوح سفينة عبر قناة. التحدي هو استعادة هذا الارتباط البديهي بين الأمر والحركة بسرعة، حتى عندما لم يتم التوقع للمصدر المسبب للمشكلة مسبقاً.
طبقة تعلم فوق وحدات التحكم الحالية
بدلاً من إعادة تصميم وحدة التحكم منخفضة المستوى لكل حادث محتمل، يلحق الباحثون طبقة عليا جديدة تسمى FLAIR، اختصاراً لـ Fast Learning‑Based Adaptation for Immediate Recovery. تستمع FLAIR لنفس الأوامر التي يرسلها مشغل الإنسان—مثل «تقدّم» أو «انعطف يساراً»—وتراقب كيف يتحرك الروبوت فعلياً باستخدام حسّاساته الداخلية. من خلال مقارنة الحركة المقصودة بالحركة الفعلية، تتعلم وصفاً رياضياً مدمجاً لما يزعج الجهاز في الوقت الحالي، مثل تراجع القبضة على أحد المسارات أو دفعة جانبية من الرياح. كل 225 ملِّ ثانية، تحدّث هذه الصورة الداخلية وتعدّل الأوامر قليلاً قبل إرسالها إلى وحدة التحكم الأصلية. للحفاظ على قابلية الفهم لدى البشر، تمثل FLAIR الاضطراب العام بمنحنيات بسيطة بدلاً من الشبكات العميقة المظلمة، ويمكنها إبراز الأماكن أو الاتجاهات التي تشكل حالياً أخطاراً أكبر. 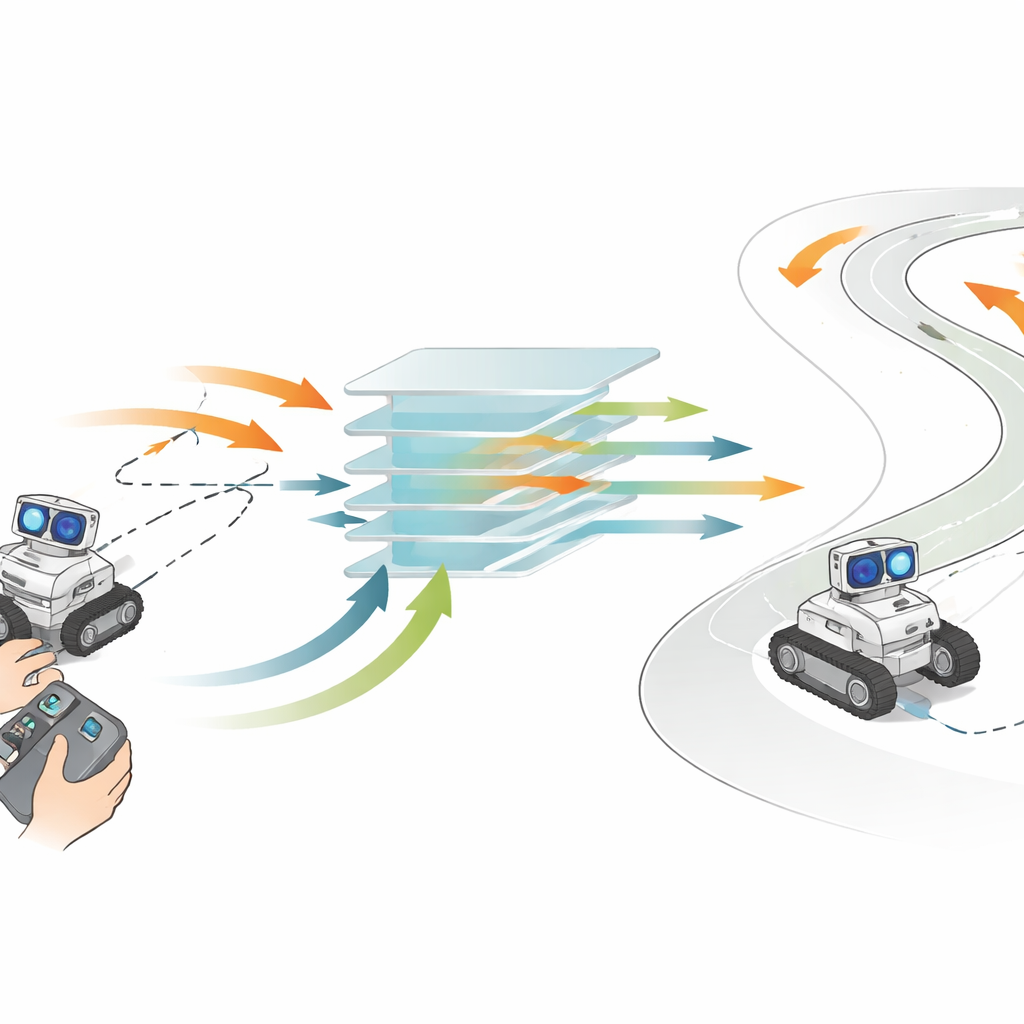
اختبار الروبوتات على منحدرات ومنحنيات وعواصف اصطناعية
لاختبار قدرات FLAIR، أجرى الفريق أكثر من 700 تجربة مع روبوت ذو مسارات على حلبات اختبار داخلية. تضمنت إحدى المسارات منحنيات ضيقة على شكل S؛ وجمعت أخرى بين منحدر زلق وقسم محاكٍ للرياح حيث دفعت مراوح خارجية الروبوت جانبياً؛ وأضاف قسم ثالث مطبات وعقبات ليهز الحساسات ويُدخل ضوضاء إضافية. قامت الفرق بمحاكاة أنواع مختلفة من المشاكل: تلف ثابت (مثل مسار أصبح أضعف بشكل دائم)، وتلف ديناميكي يتغير مع الزمن، وتأثيرات تعتمد على الحالة حيث يختلف الاضطراب باختلاف الموضع أو اتجاه المركبة، مما يعكس ظواهر حقيقية مثل قوى بيرنولي التي تجذب السفن نحو جوانب القنوات. قاد برنامج تالٍ الطرق نفسها مع وبدون FLAIR، وقارن الفريق مدى تطابق مسار الروبوت مع الأوامر ووقت استكمال كل دورة.
استعادة التحكم أسرع من الأساليب القائمة
عبر جميع أقسام الاختبار، قلّصت FLAIR التفاوت بين الحركة المأمورة والحركة الفعلية بحوالي ثلاثة أرباع وخفّضت أوقات اللفة تقريباً بنفس النسبة، مما قرب الأداء إلى مستوى روبوت غير متعرض للاضطراب. على منحدر صعب جمع الانزلاق وتلف الأجهزة، استعاد النظام فعلياً قابلية التشغيل الكاملة، بينما لم تتمكن وحدات التحكم المثلى والتكيفية القياسية إلا من تقليل الخطأ للنصف كأفضل تقدير. فشل خط أساس يعتمد على التعلم التعزيزي عبر الإنترنت فشلاً ذريعاً، فصار غير آمن قبل أن يتمكن من التكيف. كما ثبت أن FLAIR متين عندما تغير الاضطراب منتصف التجربة: اكتشف أن نموذجه السابق لم يعد يتوافق مع الواقع، مسح ذاكرته وأعاد تعلم وصف جديد في ثوانٍ، محافظاً على قابلية التوجيه حتى مع تغيّر الظروف. انتقلت نفس الاستراتيجية أيضاً إلى روبوت محاكٍ ذو ستة أرجل وبَنيات مفصلية عديدة، حيث ساعدت FLAIR على تعويض رجل أضعف.
رؤية ما يشعر به الروبوت
إلى جانب الحفاظ على المسار، توفر FLAIR نافذة إلى عالم الروبوتات. لأنها تُنمذج كيف تتغير الاضطرابات مع الموضع والاتجاه، يمكنها إظهار للمشغل أين تكون القوى أقوى—قرب حافة القناة، عند زاوية منحدر معينة أو عند مواجهة الريح. تحوّل هذه «الحدس الذاتي» النظام إلى أداة تشخيصية، وتلمّح إلى ما إذا كان السبب المرجح تآكلًا أو تضاريس أو دفعًا خارجيًا، وتقترح مسارات أكثر أماناً تتجنب المناطق عالية المخاطر. والأهم أنَّ الطريقة تعتمد فقط على حسّاسات الروبوت والحاسوب onboard الموجودين بالفعل، لذا يمكن تشغيلها ميدانياً بدون اتصالات سحابية أو بيانات تدريب مجمعة مسبقاً.
ماذا يعني هذا لروبوتات الحياة اليومية
تُظهر الدراسة أن طبقة تعلم خفيفة الوزن يمكن أن تجعل الروبوتات أكثر تحملًا للمفاجآت بكثير، من دون نماذج مثالية لكل اضطراب محتمل. طالما أن القوى التصحيحية تبقى ضمن ما يمكن للمحركات توفيره ماديًا، يمكن لـFLAIR أن تعيد تعلم كيفية ترجمة أوامر الإنسان إلى الأفعال منخفضة المستوى الصحيحة بسرعة، حتى على تضاريس وعرة وتحت ظروف متغيرة. للمستخدمين غير المتخصصين، يعني هذا أن مركبات برية مستقبلية أو روبوتات توصيل أو آلات استكشافية قد تتصرف بشكل أقرب للأدوات الموثوقة—تستمر في «فعل ما تقصده» عندما يسيء الحال للبيئة، وتقدّم دلائل عند بلوغ الحدود بدلاً من الانحراف المفاجئ عن المسار.
الاستشهاد: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
الكلمات المفتاحية: مرونة الروبوت, تحكم بالتعلم عبر الإنترنت, المركبات الذاتية, استعادة الروبوت بعد التلف, الروبوتات التكيفية