Clear Sky Science · es
Volver a poner robots en rumbo reconstituyendo el control en situaciones inesperadas mediante aprendizaje en línea
Por qué importa mantener a los robots bajo control
Los robots están saliendo de las plantas y entrando en entornos concurridos e impredecibles: calles urbanas, granjas, zonas de desastre e incluso rutas marítimas. En estos escenarios, una ráfaga de viento, una placa de hielo o una rueda dañada pueden hacer que un robot actúe de formas que sus diseñadores nunca previeron, poniendo en riesgo a personas, bienes y misiones. Este artículo presenta FLAIR, un complemento de aprendizaje rápido que ayuda a que los robots permanezcan bajo control humano cuando ocurre lo inesperado, sin necesidad de rediseñar sus mecanismos internos desde cero. 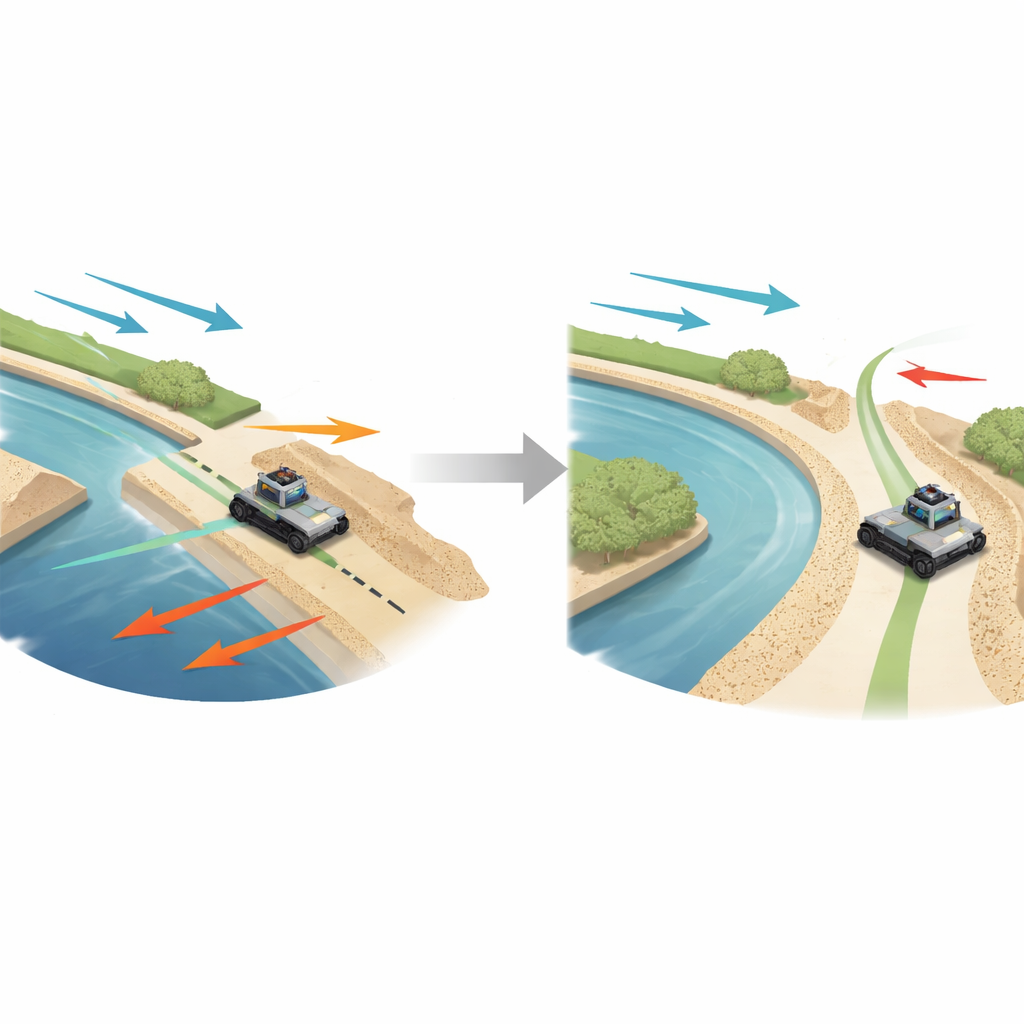
Robots frente al mundo real
La mayoría de los robots y vehículos inteligentes se ajustan para condiciones que los ingenieros pueden prever y codificar: suelos secos en un almacén, carreteras bien señalizadas, hardware estable. En el mundo real, sin embargo, las cosas fallan: el peso se desplaza cuando la carga se mueve, las orugas se desgastan, el terreno se vuelve resbaladizo o fuerzas como vientos laterales y corrientes de agua desvían los vehículos de su rumbo. Cuando esto sucede, un operador puede empujar una palanca hacia adelante y observar que la máquina deriva hacia un lado. Los autores definen un robot como “operable” cuando su respuesta coincide con lo que una persona espera razonablemente; bajo perturbaciones fuertes, ese vínculo se rompe, provocando accidentes como un barco que queda encajado cruzando un canal. El reto es restaurar rápidamente ese vínculo intuitivo entre comando y movimiento, incluso cuando la perturbación nunca fue anticipada de antemano.
Una capa de aprendizaje encima de los controladores existentes
En lugar de rediseñar el controlador de bajo nivel del robot para cada posible contratiempo, los investigadores añaden una nueva capa de alto nivel llamada FLAIR, acrónimo de Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR escucha los mismos comandos que envía un operador humano—como “avanzar” o “girar a la izquierda”—y observa cómo se mueve realmente el robot mediante sensores a bordo. Al comparar el movimiento deseado con el movimiento real, aprende una descripción matemática compacta de lo que actualmente está perturbando la máquina, como una tracción reducida en una oruga o un empuje lateral del viento. Cada 225 milisegundos actualiza este mapa interno y ajusta ligeramente los comandos antes de enviarlos al controlador original. Para mantener el sistema comprensible para los humanos, FLAIR representa la perturbación global con curvas sencillas en lugar de redes profundas opacas, y puede resaltar dónde en el espacio o en qué direcciones hay más riesgo en ese momento. 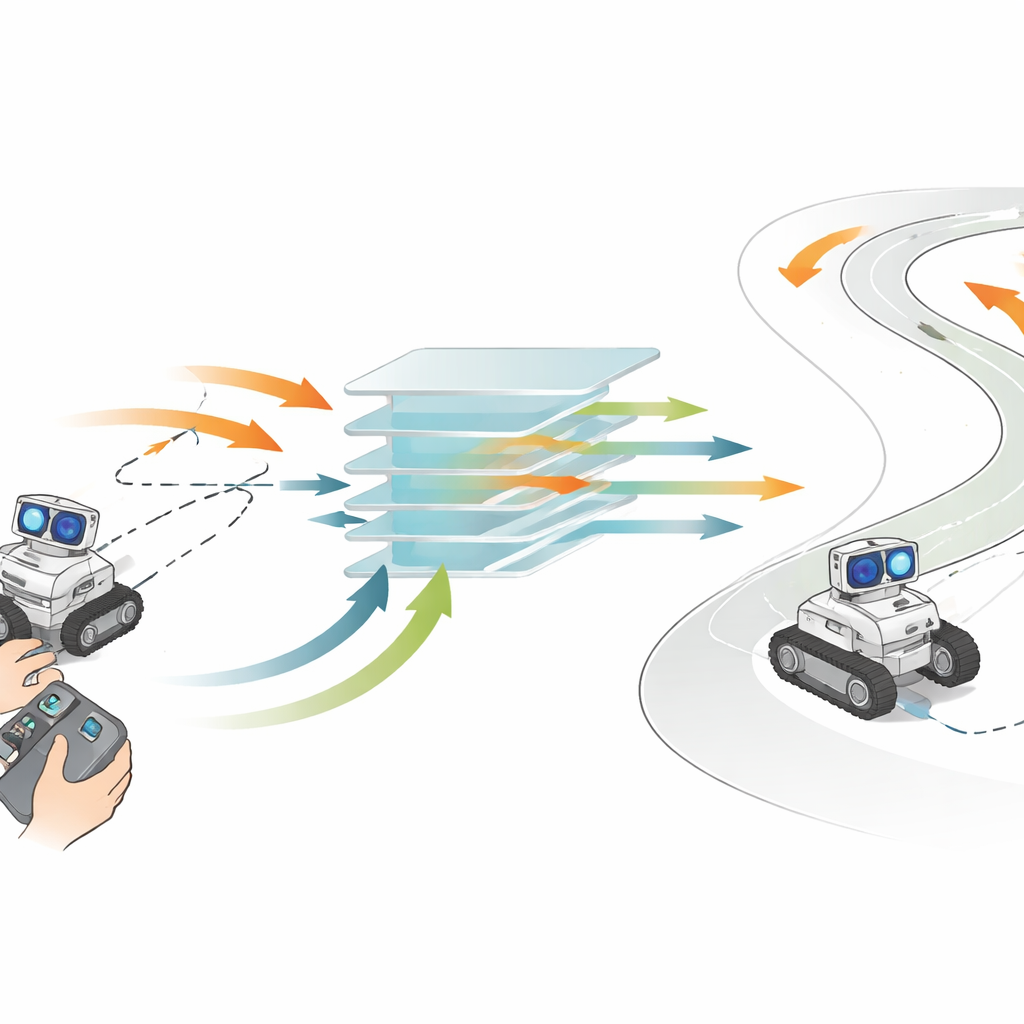
Probando robots en rampas, curvas y tormentas artificiales
Para evaluar las capacidades de FLAIR, el equipo realizó más de 700 experimentos con un robot de orugas en circuitos de prueba interiores. Un circuito presentaba curvas en S cerradas; otro combinaba una rampa resbaladiza con una sección de viento simulado donde ventiladores externos empujaban lateralmente al robot; un tercero añadía baches y obstáculos para sacudir los sensores e introducir ruido adicional. Los investigadores simularon distintos tipos de problemas: daños estáticos (como una oruga permanentemente debilitada), daños dinámicos que cambiaban con el tiempo y efectos dependientes del estado donde la perturbación dependía de la posición o la orientación, evocando fenómenos reales como las fuerzas de Bernoulli que atraen a los barcos hacia las paredes de un canal. Un conductor automático siguió los mismos trazados con y sin FLAIR, y el equipo comparó cuán estrechamente la trayectoria del robot coincidía con los comandos y cuánto tardaba en completar cada circuito.
Recuperando el control más rápido que los métodos existentes
En todas las secciones de prueba, FLAIR redujo la discrepancia entre el movimiento comandado y el real en aproximadamente tres cuartas partes y disminuyó los tiempos de vuelta en una fracción similar, acercando el rendimiento al de un robot sin perturbaciones. En una rampa particularmente desafiante con deslizamiento mixto y daño en el hardware, recuperó eficazmente la operabilidad total, mientras que los controladores óptimos y adaptativos estándar solo pudieron reducir el error hasta la mitad en el mejor de los casos. Una línea base de aprendizaje por refuerzo en línea fracasó por completo, volviéndose insegura antes de poder adaptarse. FLAIR también demostró robustez cuando la perturbación cambiaba durante la ejecución: detectó que su modelo anterior ya no concordaba con la realidad, borró su memoria y reaprendió una nueva descripción en segundos, manteniendo el robot gobernable mientras las condiciones variaban. La misma estrategia se aplicó a un robot simulado de seis patas con muchas articulaciones, donde FLAIR ayudó a compensar una pierna debilitada.
Ver lo que siente el robot
Más allá de mantener a los robots en ruta, FLAIR ofrece una ventana a su mundo. Como modela cómo varían las perturbaciones con la posición y la dirección, puede mostrar al operador dónde las fuerzas son más fuertes—cerca del borde de un canal, en un ángulo de rampa concreto o cuando se enfrenta al viento. Esta “introspección” convierte el sistema en una herramienta diagnóstica, señalando si el problema probablemente se debe a desgaste, terreno o un empuje externo, y sugiriendo rutas más seguras que eviten regiones de alto riesgo. Es importante destacar que el método se basa únicamente en los sensores y el ordenador a bordo del robot, por lo que puede funcionar en el campo sin conexiones a la nube ni datos de entrenamiento pre‑recogidos.
Qué significa esto para la robótica cotidiana
El estudio demuestra que una capa de aprendizaje ligera puede hacer que los robots sean mucho más resilientes ante sorpresas, sin modelos perfectos de cada posible perturbación. Mientras las fuerzas correctoras permanezcan dentro de lo que los motores pueden suministrar físicamente, FLAIR puede reaprender rápidamente cómo traducir los comandos humanos en las acciones de bajo nivel correctas, incluso en terreno accidentado y bajo condiciones cambiantes. Para los no expertos, esto significa que futuros vehículos terrestres, robots de reparto o máquinas exploratorias podrían comportarse más como herramientas de confianza: seguir haciendo “lo que quieres” cuando el entorno se comporta mal y ofrecer pistas cuando se alcanzan los límites, en lugar de desviarse de forma repentina.
Cita: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Palabras clave: resiliencia robótica, control por aprendizaje en línea, vehículos autónomos, recuperación de daños en robots, robótica adaptable