Clear Sky Science · ru
Возвращение роботов в управляемое состояние: воссоздание контроля в неожиданных ситуациях с помощью онлайн‑обучения
Почему важно сохранять контроль над роботами
Роботы покидают заводские цеха и переходят в оживлённые, непредсказуемые среды: городские улицы, фермы, зоны бедствий и даже судоходные пути. В таких условиях внезапный порыв ветра, участок льда или повреждённое колесо могут заставить робота вести себя так, как его разработчики не предусматривали, подвергая риску людей, имущество и задачи. В этой статье представлена система FLAIR — быстро обучаемый модуль, который помогает роботам оставаться управляемыми человеком при неожиданных ситуациях, не требуя полной переработки их внутренней логики. 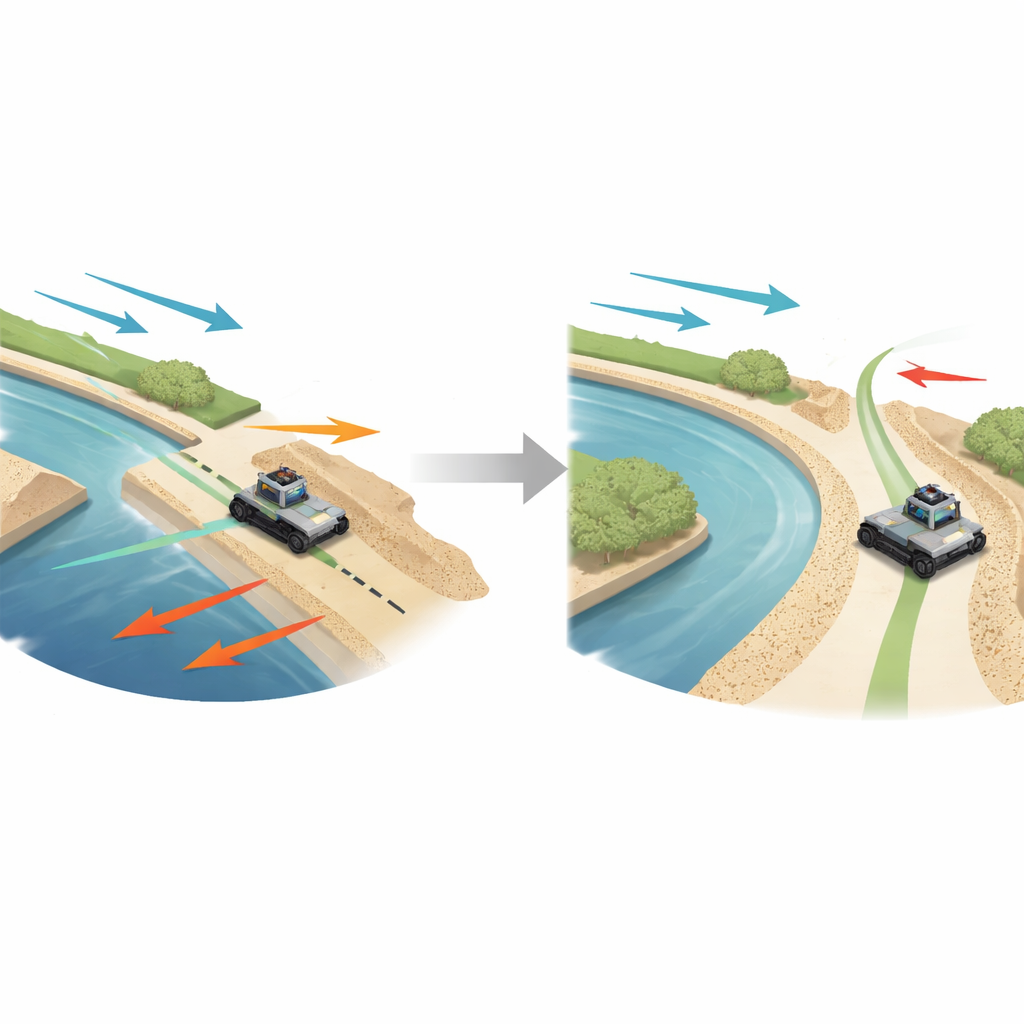
Роботы против реального мира
Большинство роботов и умных транспортных средств настроены на условия, которые инженеры могут предвидеть и закодировать — сухие полы на складе, хорошо размеченные дороги, исправное оборудование. В реальном мире же случаются сбои: груз смещается, гусеницы изнашиваются, поверхность становится скользкой, или боковые ветры и потоки воды сносят машину с курса. В таких случаях оператор может подать джойстиком команду «вперёд», а машина начать смещаться вбок. Авторы называют робота «рабочим» (operable), когда его отклик соответствует разумным ожиданиям человека; при сильных возмущениях эта связь разрывается, что ведёт к авариям, например к тому, что судно застревает поперёк канала. Задача — быстро восстановить интуитивную связь между командой и движением, даже если возмущение не было заранее предсказано.
Слой обучения поверх существующих контроллеров
Вместо того чтобы для каждого возможного инцидента перестраивать низкоуровневый контроллер робота, исследователи добавляют новый высокоуровневый слой под названием FLAIR (Fast Learning‑Based Adaptation for Immediate Recovery). FLAIR слушает те же команды, что и человек‑оператор — например «ехать вперёд» или «повернуть влево» — и отслеживает фактическое движение робота с помощью бортовых датчиков. Сравнивая намеренное движение с реальным, он учит компактное математическое описание текущего возмущения — например снижение сцепления одной гусеницы или боковой порыв ветра. Каждые 225 миллисекунд система обновляет эту внутреннюю модель и слегка корректирует команды перед передачей их в исходный контроллер. Чтобы сохранить понятность для человека, FLAIR описывает общее возмущение простыми кривыми, а не непрозрачными глубокими сетями, и может указывать, где в пространстве или в каких направлениях сейчас наиболее опасно. 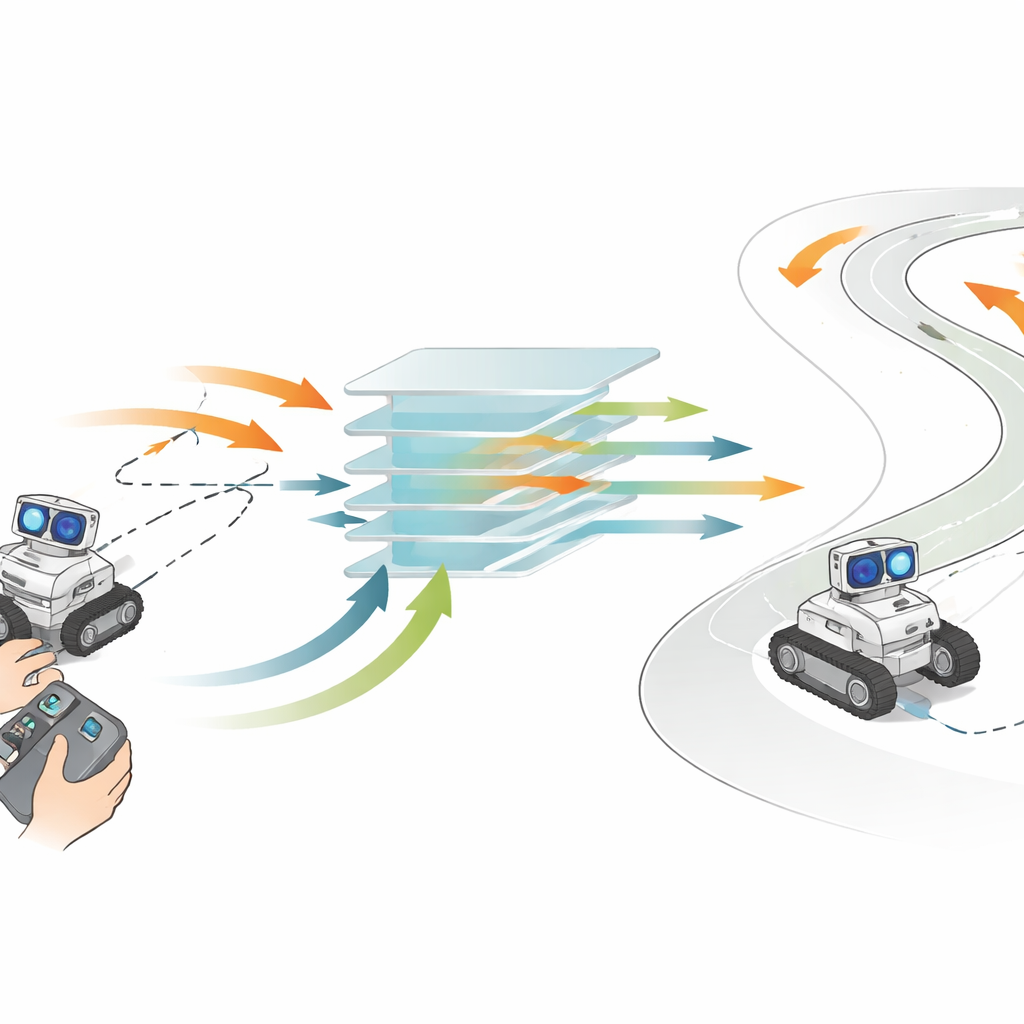
Тесты на уклонах, в поворотах и при искусственных бурях
Чтобы проверить возможности FLAIR, команда провела более 700 экспериментов с гусеничным роботом на внутренних испытательных трассах. Один маршрут включал плотные S‑образные повороты; другой сочетал скользящий склон с имитацией ветра, где внешние вентиляторы сносили робота в сторону; третий добавлял бугры и препятствия, чтобы встряхнуть датчики и увеличить шум. Исследователи смоделировали разные типы проблем: статические повреждения (например, постоянно ослабленная гусеница), динамические повреждения, изменяющиеся во времени, и зависимые от состояния эффекты, где возмущение меняется в зависимости от позиции или курса — что напоминает реальные явления, такие как силы Бернулли, тянущие суда к стенкам канала. Автоматический водитель проходил те же трассы с FLAIR и без него, а команда сравнивала, насколько путь робота соответствовал командам и сколько времени занимал круг.
Восстановление контроля быстрее существующих методов
Во всех тестах FLAIR сократил несоответствие между командой и реальным движением примерно на три четверти и уменьшил время прохождения круга примерно в той же пропорции, доведя показатели близко к тем, что наблюдаются у не нарушенного робота. На особенно сложном склоне со смешанным проскальзыванием и повреждением оборудования он фактически восстановил полную управляемость, тогда как стандартные оптимальные и адаптивные контроллеры могли лишь наполовину снизить ошибку в лучшем случае. Базовый подход с онлайн‑обучением через подкрепление полностью провалился, став небезопасным прежде, чем успел адаптироваться. FLAIR также показал устойчивость при изменении возмущения в ходе прогона: он замечал, что прежняя модель больше не соответствует реальности, очищал память и за секунды переобучался, поддерживая управляемость робота даже при смене условий. Та же стратегия сработала и в симуляции шестиногого робота с множеством суставов, где FLAIR помог компенсировать ослабленную ногу.
Видеть, что «чувствует» робот
Помимо сохранения курса, FLAIR открывает окно в мир машины. Поскольку он моделирует, как возмущения зависят от положения и направления, он может показать оператору, где силы наиболее сильны — у края канала, под определённым углом склона или при встречном ветре. Такая «интроспекция» превращает систему в диагностический инструмент, подсказывая, связано ли дело с износом, рельефом или внешним толчком, и предлагая более безопасные пути, избегающие зон высокого риска. Важно, что метод опирается только на существующие датчики и бортовой компьютер робота, поэтому он может работать в полевых условиях без облачных связей или заранее собранных обучающих данных.
Что это значит для повседневной робототехники
Исследование демонстрирует, что лёгкий слой обучения способен заметно повысить устойчивость роботов к неожиданностям, без идеальных моделей всех возможных возмущений. Пока корректирующие силы остаются в пределах возможностей моторов, FLAIR может быстро переучиться переводить команды человека в правильные низкоуровневые действия, даже на пересечённой местности и в меняющихся условиях. Для неспециалистов это означает, что будущие наземные машины, роботы‑доставщики или исследовательские аппараты смогут вести себя более предсказуемо и надёжно — «делать то, что вы имели в виду», когда среда нарушает правила, и подсказывать, когда достигнуты их пределы, вместо внезапного ухода с курса.
Цитирование: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Ключевые слова: устойчивость роботов, онлайн‑обучение для управления, автономные транспортные средства, восстановление после повреждений робота, адаптивная робототехника