Clear Sky Science · en
Getting robots back on track by reconstituting control in unexpected situations with online learning
Why keeping robots in control matters
Robots are leaving factory floors and moving into busy, unpredictable places: city streets, farms, disaster zones and even shipping lanes. In these settings, a sudden gust of wind, a patch of ice or a damaged wheel can make a robot behave in ways its designers never planned for, putting people, property and missions at risk. This article introduces FLAIR, a fast-learning add‑on that helps robots stay under human control when the unexpected happens, without needing to redesign their inner workings from scratch. 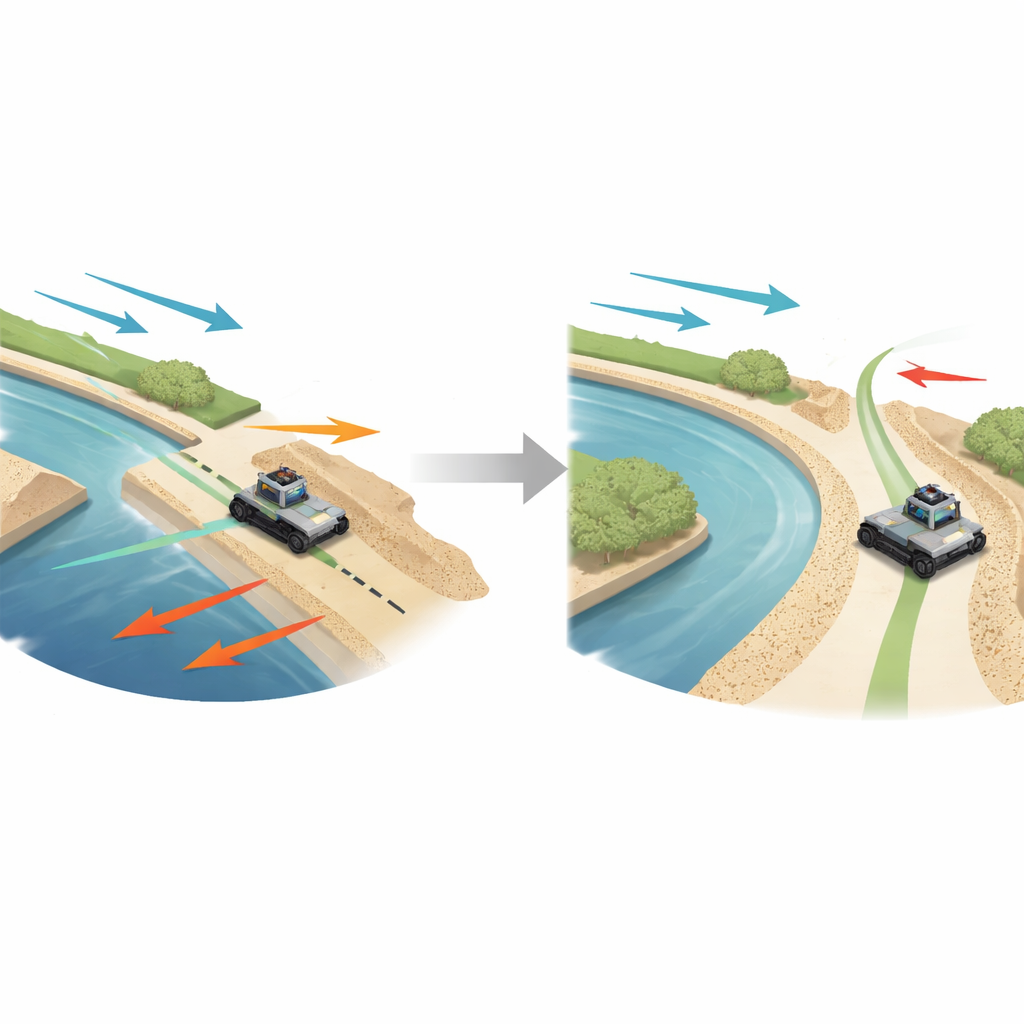
Robots versus the real world
Most robots and smart vehicles are tuned for conditions that engineers can foresee and encode—dry floors in a warehouse, well-marked roads, stable hardware. In the real world, though, things go wrong: weight shifts when cargo moves, tracks wear down, ground becomes slippery, or forces like side winds and water flows push vehicles off course. When this happens, an operator can move a joystick forward and watch the machine drift sideways instead. The authors define a robot as “operable” when its response matches what a person reasonably expects; under strong disturbances, that link breaks, leading to accidents such as a ship wedging itself across a canal. The challenge is to restore this intuitive link between command and motion quickly, even when the disturbance was never anticipated in advance.
A learning layer on top of existing controllers
Instead of redesigning the robot’s low‑level controller for every possible mishap, the researchers bolt on a new high‑level layer called FLAIR, short for Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR listens to the same commands that a human operator sends—such as “go forward” or “turn left”—and watches how the robot actually moves using onboard sensors. By comparing intended motion to real motion, it learns a compact mathematical description of whatever is currently disturbing the machine, such as reduced grip on one track or a sideways push from wind. Every 225 milliseconds, it updates this internal picture and slightly adjusts the commands before passing them along to the original controller. To keep the system understandable to humans, FLAIR represents the overall disturbance with simple curves rather than opaque deep networks, and it can highlight where in space or which directions are currently most hazardous. 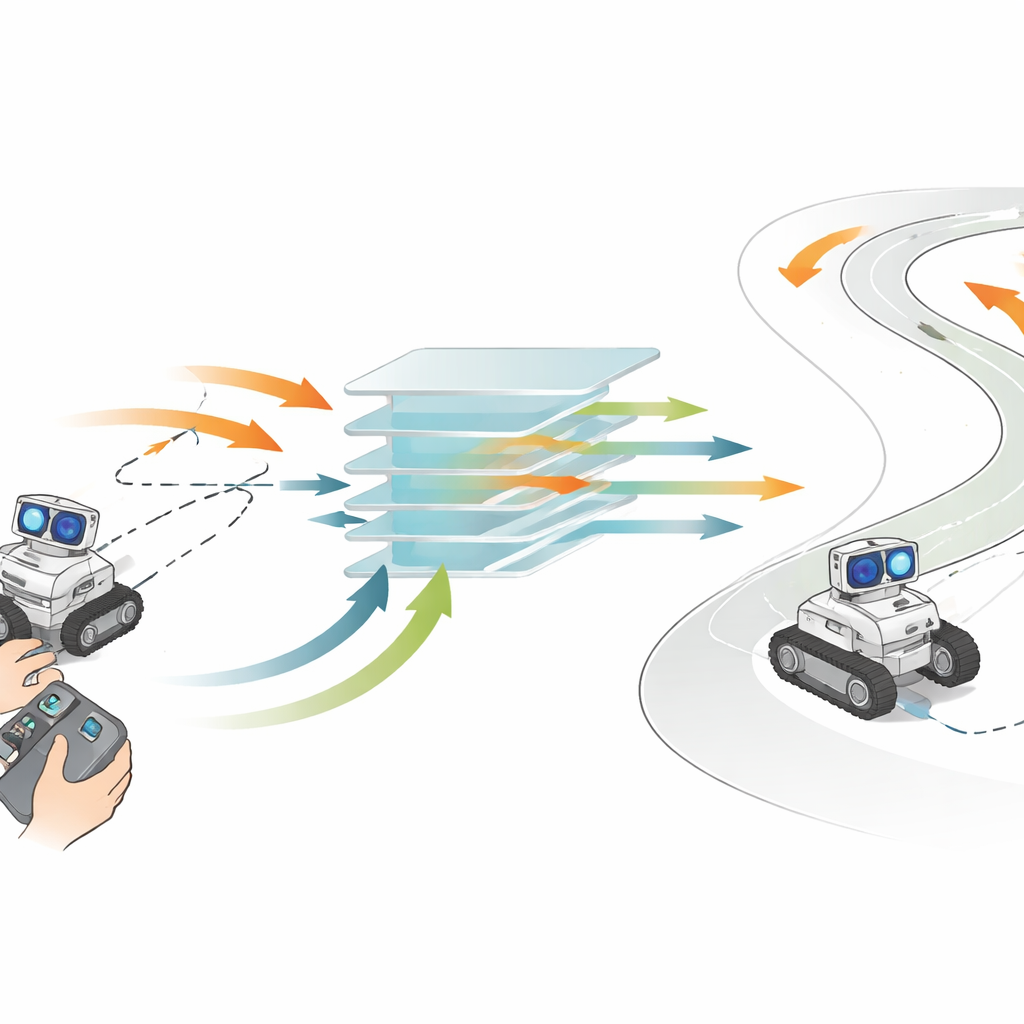
Testing robots on ramps, curves and artificial storms
To probe FLAIR’s abilities, the team ran more than 700 experiments with a tracked robot on indoor test circuits. One course featured tight S‑shaped curves; another combined a slippery ramp with a mock wind section where external fans pushed the robot sideways; a third added bumps and obstacles to shake the sensors and introduce extra noise. The researchers simulated different types of trouble: static damage (like a permanently weakened track), dynamic damage that changed over time, and state‑dependent effects where the disturbance depended on position or heading, echoing real phenomena such as the Bernoulli forces that tug ships toward canal walls. An automatic driver followed the same paths with and without FLAIR, and the team compared how closely the robot’s path matched the commands and how long it took to complete each circuit.
Recovering control faster than existing methods
Across all test sections, FLAIR cut the mismatch between commanded and actual motion by about three‑quarters and reduced lap times by roughly the same fraction, bringing performance close to that of an undisturbed robot. On a particularly challenging ramp with mixed slipping and hardware damage, it effectively restored full operability, while standard optimal and adaptive controllers could only halve the error at best. An online reinforcement‑learning baseline failed outright, becoming unsafe before it could adapt. FLAIR also proved robust when the disturbance changed mid‑run: it detected that its previous model no longer matched reality, cleared its memory and relearned a new description in seconds, keeping the robot steerable even as conditions shifted. The same strategy carried over to a simulated six‑legged robot with many joints, where FLAIR helped compensate for a weakened leg.
Seeing what the robot feels
Beyond keeping robots on track, FLAIR offers a window into their world. Because it models how disturbances vary with position and direction, it can show an operator where forces are strongest—near the edge of a canal, at a particular ramp angle or when facing into the wind. This “introspection” turns the system into a diagnostic tool, hinting at whether the issue is likely to be wear, terrain or an external push, and suggesting safer paths that avoid high‑risk regions. Importantly, the method relies only on the robot’s existing sensors and onboard computer, so it can run in the field without cloud connections or pre‑collected training data.
What this means for everyday robotics
The study demonstrates that a lightweight learning layer can make robots far more resilient to surprises, without perfect models of every possible disturbance. As long as the corrective forces remain within what the motors can physically supply, FLAIR can quickly relearn how to translate human commands into the right low‑level actions, even on rough terrain and under changing conditions. For non‑experts, this means future ground vehicles, delivery robots or exploratory machines could behave more like trustworthy tools—continuing to “do what you mean” when the environment misbehaves, and offering clues when limits are reached, instead of suddenly veering off course.
Citation: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Keywords: robot resilience, online learning control, autonomous vehicles, robot damage recovery, adaptive robotics