Clear Sky Science · pt
Colocando robôs de volta nos trilhos ao reconstituir o controle em situações inesperadas com aprendizado online
Por que manter os robôs sob controle é importante
Robôs estão saindo das fábricas e indo para espaços movimentados e imprevisíveis: ruas da cidade, fazendas, zonas de desastre e até canais de navegação. Nesses ambientes, uma rajada de vento repentina, uma placa de gelo ou uma roda danificada podem fazer um robô se comportar de maneiras que seus projetistas não previram, colocando pessoas, bens e missões em risco. Este artigo apresenta o FLAIR, um complemento de aprendizado rápido que ajuda robôs a permanecerem sob controle humano quando o inesperado acontece, sem precisar redesenhar seus componentes internos do zero. 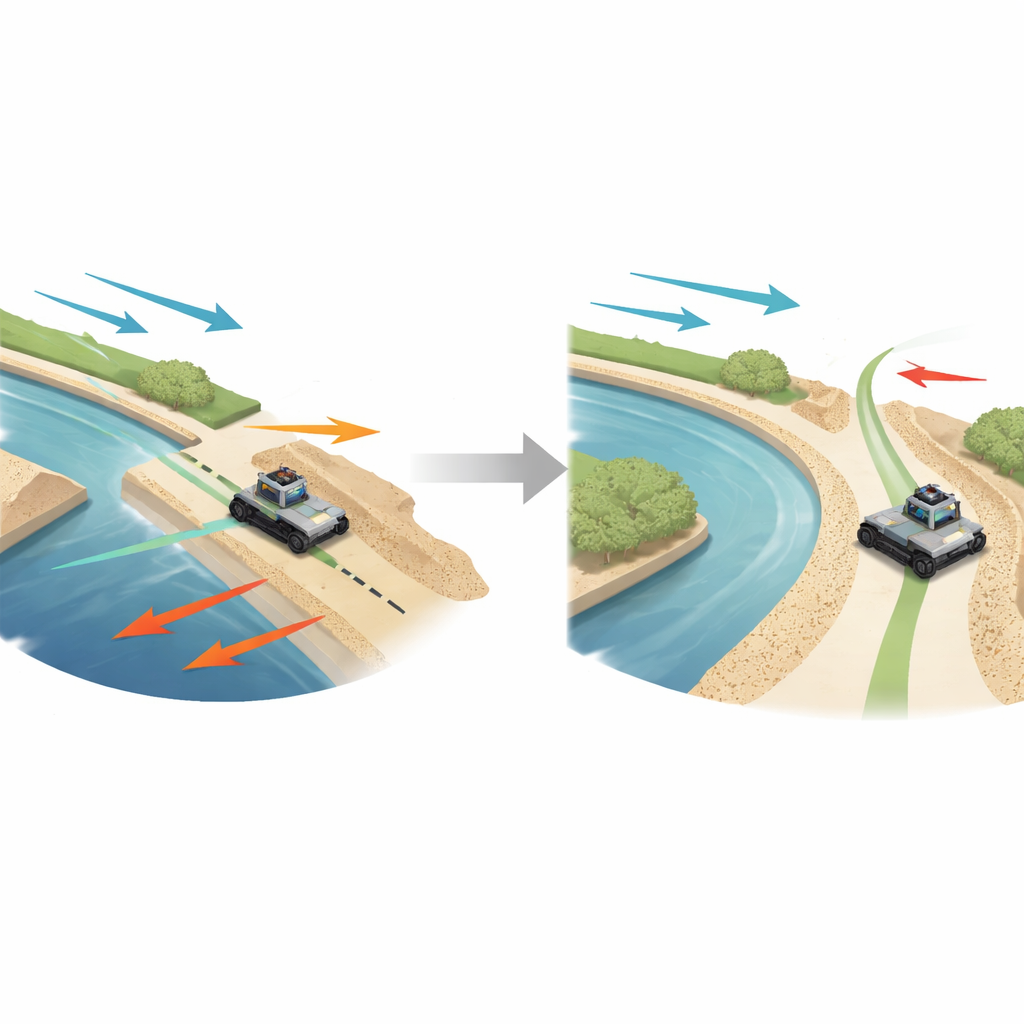
Robôs versus o mundo real
A maioria dos robôs e veículos inteligentes é ajustada para condições que os engenheiros conseguem prever e codificar—piso seco em um depósito, estradas bem sinalizadas, hardware estável. No mundo real, porém, as coisas dão errado: a carga se desloca, trilhos se desgastam, o solo fica escorregadio, ou forças como vento lateral e correntes empurram os veículos para fora do curso. Quando isso ocorre, um operador pode empurrar um joystick para frente e ver a máquina deslizar para o lado. Os autores definem um robô como “operável” quando sua resposta corresponde ao que uma pessoa espera razoavelmente; sob distúrbios fortes, esse vínculo se rompe, levando a acidentes, como um navio encravando-se através de um canal. O desafio é restaurar esse elo intuitivo entre comando e movimento rapidamente, mesmo quando o distúrbio nunca foi antecipado.
Uma camada de aprendizado por cima dos controladores existentes
Em vez de redesenhar o controlador de baixo nível do robô para cada possível contratempo, os pesquisadores acoplam uma nova camada de alto nível chamada FLAIR, sigla para Fast Learning‑Based Adaptation for Immediate Recovery. O FLAIR escuta os mesmos comandos que um operador humano envia—como “siga em frente” ou “vire à esquerda”—e observa como o robô realmente se move usando sensores embarcados. Ao comparar o movimento pretendido com o movimento real, ele aprende uma descrição matemática compacta do que está perturbando a máquina no momento, como perda de aderência em uma esteira ou um empuxo lateral do vento. A cada 225 milissegundos, atualiza essa imagem interna e ajusta ligeiramente os comandos antes de passá‑los ao controlador original. Para manter o sistema compreensível para humanos, o FLAIR representa o distúrbio geral com curvas simples em vez de redes profundas opacas, e pode indicar onde no espaço ou em que direções há atualmente mais risco. 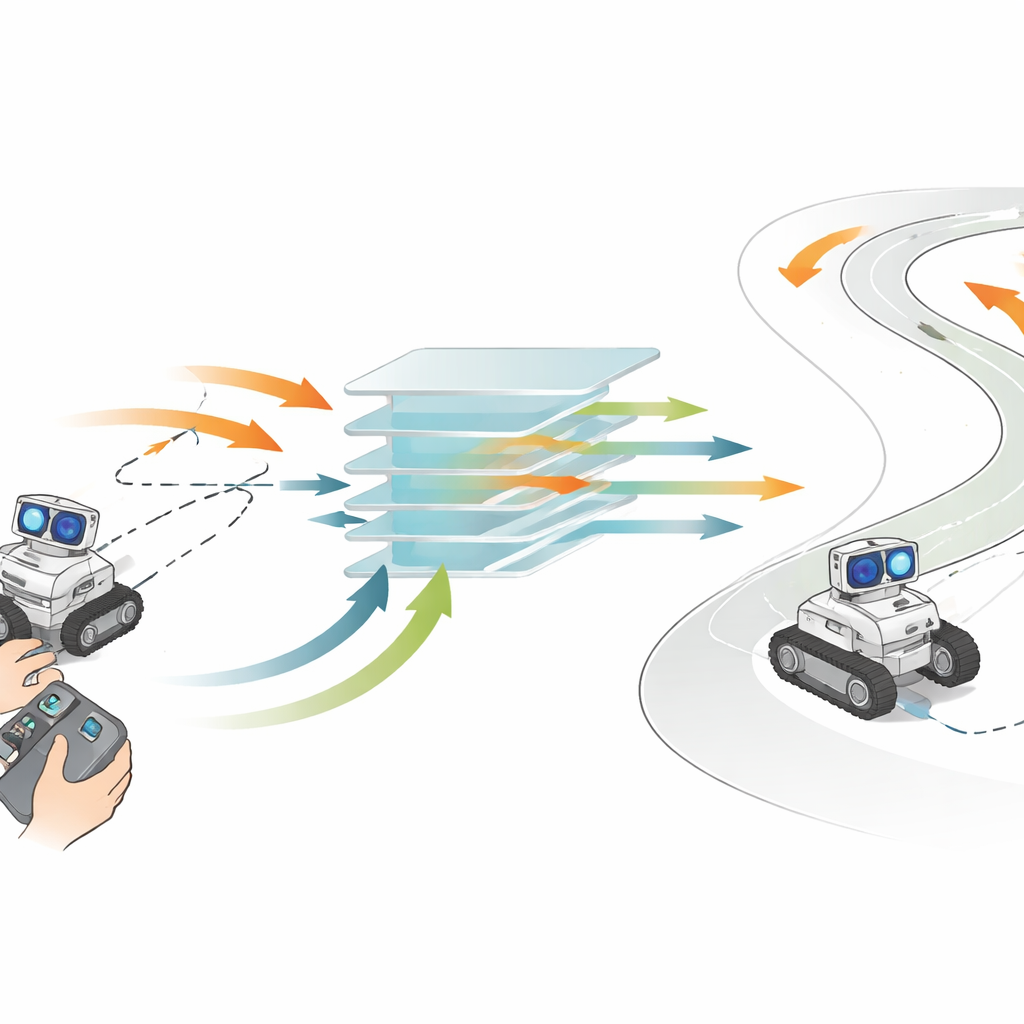
Testando robôs em rampas, curvas e tempestades artificiais
Para avaliar as capacidades do FLAIR, a equipe realizou mais de 700 experimentos com um robô com esteiras em circuitos de teste internos. Um percurso apresentava curvas em S apertadas; outro combinava uma rampa escorregadia com uma seção de vento simulado onde ventiladores externos empurravam o robô lateralmente; um terceiro adicionava ondulações e obstáculos para sacudir os sensores e introduzir ruído extra. Os pesquisadores simularam diferentes tipos de problema: dano estático (como uma esteira permanentemente enfraquecida), dano dinâmico que mudava ao longo do tempo, e efeitos dependentes do estado em que o distúrbio dependia da posição ou do rumo, ecoando fenômenos reais como as forças de Bernoulli que puxam navios para as paredes de um canal. Um piloto automático seguiu os mesmos trajetos com e sem FLAIR, e a equipe comparou quão de perto a trajetória do robô correspondia aos comandos e quanto tempo levou para completar cada circuito.
Recuperando o controle mais rápido do que métodos existentes
Em todas as seções de teste, o FLAIR reduziu a discrepância entre o movimento comandado e o real em cerca de três quartos e diminuiu os tempos de volta em aproximadamente a mesma fração, trazendo o desempenho perto do de um robô sem perturbação. Em uma rampa particularmente desafiadora com escorregamento misto e dano de hardware, ele restaurou efetivamente a operabilidade completa, enquanto controladores ótimos e adaptativos padrão só conseguiram reduzir o erro pela metade no melhor dos casos. Uma linha de base de aprendizado por reforço online falhou completamente, tornando‑se insegura antes de conseguir adaptar‑se. O FLAIR também se mostrou robusto quando o distúrbio mudou durante a corrida: detectou que seu modelo anterior já não corresponderia à realidade, limpou sua memória e reaprendeu uma nova descrição em segundos, mantendo o robô dirigível mesmo com condições variáveis. A mesma estratégia funcionou em um robô simulado de seis pernas com muitas articulações, onde o FLAIR ajudou a compensar uma perna enfraquecida.
Vendo o que o robô sente
Além de manter robôs no rumo, o FLAIR oferece uma janela para o mundo deles. Porque modela como os distúrbios variam com posição e direção, pode mostrar ao operador onde as forças são mais fortes—perto da borda de um canal, em um certo ângulo de rampa ou ao enfrentar o vento. Essa “introspecção” transforma o sistema em uma ferramenta de diagnóstico, sugerindo se o problema é provavelmente desgaste, terreno ou um empuxo externo, e indicando trajetos mais seguros que evitam regiões de alto risco. Importante: o método depende apenas dos sensores existentes do robô e do computador embarcado, de modo que pode rodar em campo sem conexões com a nuvem ou dados de treinamento pré‑coletados.
O que isso significa para a robótica do dia a dia
O estudo demonstra que uma camada de aprendizado leve pode tornar robôs muito mais resilientes a surpresas, sem modelos perfeitos de todos os possíveis distúrbios. Contanto que as forças corretivas permaneçam dentro do que os motores podem fisicamente fornecer, o FLAIR pode reaprender rapidamente como traduzir comandos humanos nas ações de baixo nível corretas, mesmo em terreno acidentado e sob condições mutantes. Para não especialistas, isso significa que futuros veículos terrestres, robôs de entrega ou máquinas de exploração podem se comportar mais como ferramentas confiáveis—continuando a “fazer o que você quer” quando o ambiente se comporta mal, e oferecendo pistas quando os limites são alcançados, em vez de, de repente, desviar do curso.
Citação: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Palavras-chave: resiliência robótica, controle por aprendizado online, veículos autônomos, recuperação de dano em robôs, robótica adaptativa