Clear Sky Science · sv
Få robotar tillbaka på rätt spår genom att återskapa kontroll i oväntade situationer med onlineinlärning
Varför det är viktigt att hålla robotar under kontroll
Robotar lämnar fabriksgolven och rör sig in i livliga, oförutsägbara miljöer: stadsgator, jordbruk, områden med katastrofer och till och med farleder. I dessa miljöer kan en plötslig vindpust, ett isfläck eller ett skadat hjul få en robot att bete sig på sätt som ingen av dess konstruktörer hade förutsett, vilket äventyrar människor, egendom och uppdrag. Denna artikel introducerar FLAIR, ett snabbt lärande tillägg som hjälper robotar att förbli under mänsklig kontroll när det oväntade inträffar, utan att behöva bygga om deras inre styrsystem från grunden. 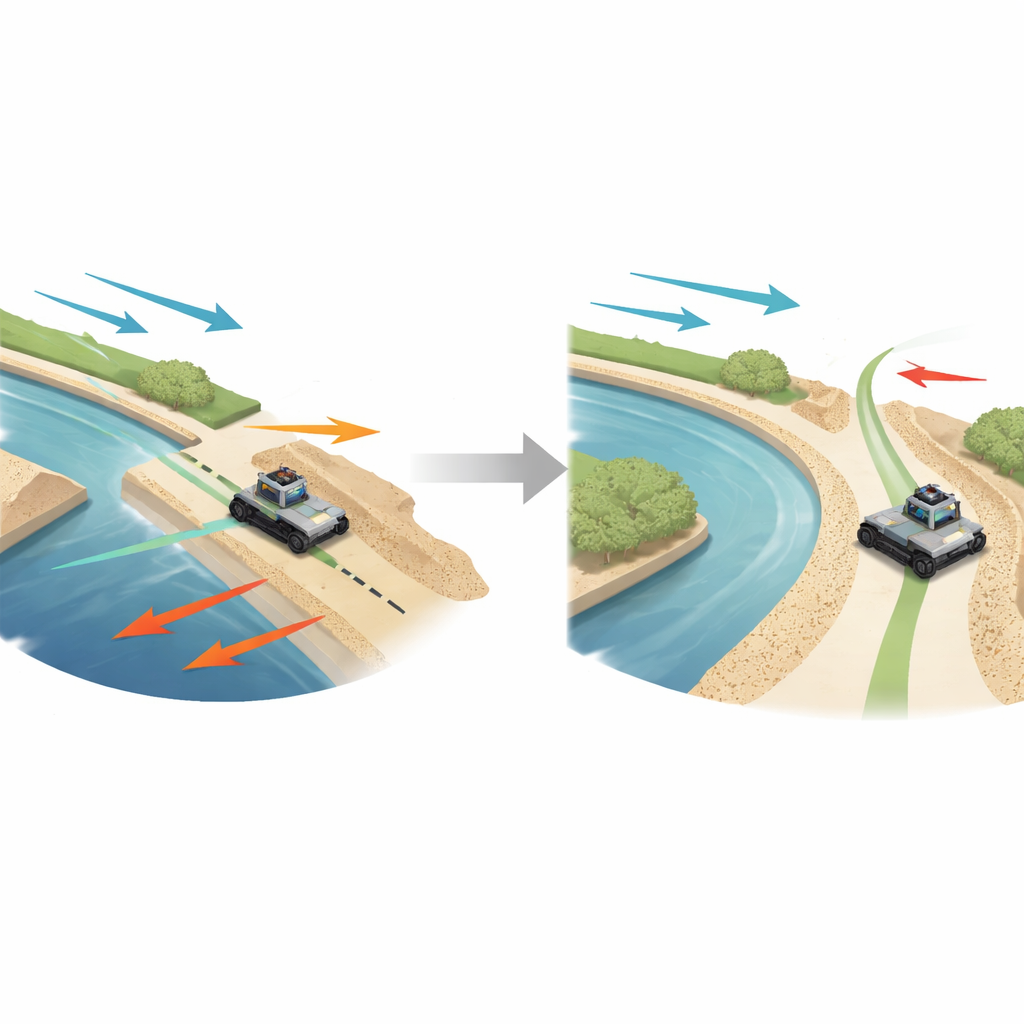
Robotar mot den verkliga världen
De flesta robotar och autonoma fordon är inställda för förhållanden som ingenjörer kan förutse och koda för—torra golv i ett lager, välmarkerade vägar, stabil hårdvara. I verkligheten går saker ofta fel: vikten kan förskjutas när lasten rör sig, band slits ner, marken blir hal eller krafter som sidovind och vattenströmar skjuter fordon ur kurs. När detta sker kan en operatör skjuta joysticken framåt och se maskinen driva åt sidan istället. Författarna definierar en robot som "manöverbar" när dess respons matchar vad en människa rimligen förväntar sig; under kraftiga störningar bryts den kopplingen, vilket kan leda till olyckor som ett fartyg som kilas tvärs över en kanal. Utmaningen är att snabbt återställa denna intuitiva länk mellan kommando och rörelse, även när störningen aldrig förutsetts.
Ett inlärningslager ovanpå befintliga styrenheter
I stället för att bygga om robotens lågnivåstyrning för varje tänkbart missöde sätter forskarna på ett nytt högre lager kallat FLAIR, en förkortning av Fast Learning‑Based Adaptation for Immediate Recovery. FLAIR lyssnar på samma kommandon som en mänsklig operatör skickar—som "gå framåt" eller "sväng vänster"—och observerar hur roboten faktiskt rör sig med hjälp av sensorer ombord. Genom att jämföra avsedd rörelse med verklig rörelse lär det sig en kompakt matematisk beskrivning av vad som för närvarande stör maskinen, till exempel minskat grepp på ett band eller ett sidotryck från vinden. Varje 225 millisekunder uppdaterar det den interna bilden och justerar försiktigt kommandona innan de skickas vidare till den ursprungliga styrenheten. För att hålla systemet begripligt för människor representerar FLAIR den övergripande störningen med enkla kurvor i stället för ogenomskinliga djupa nätverk, och det kan markera var i rummet eller vilka riktningar som för närvarande är mest farliga. 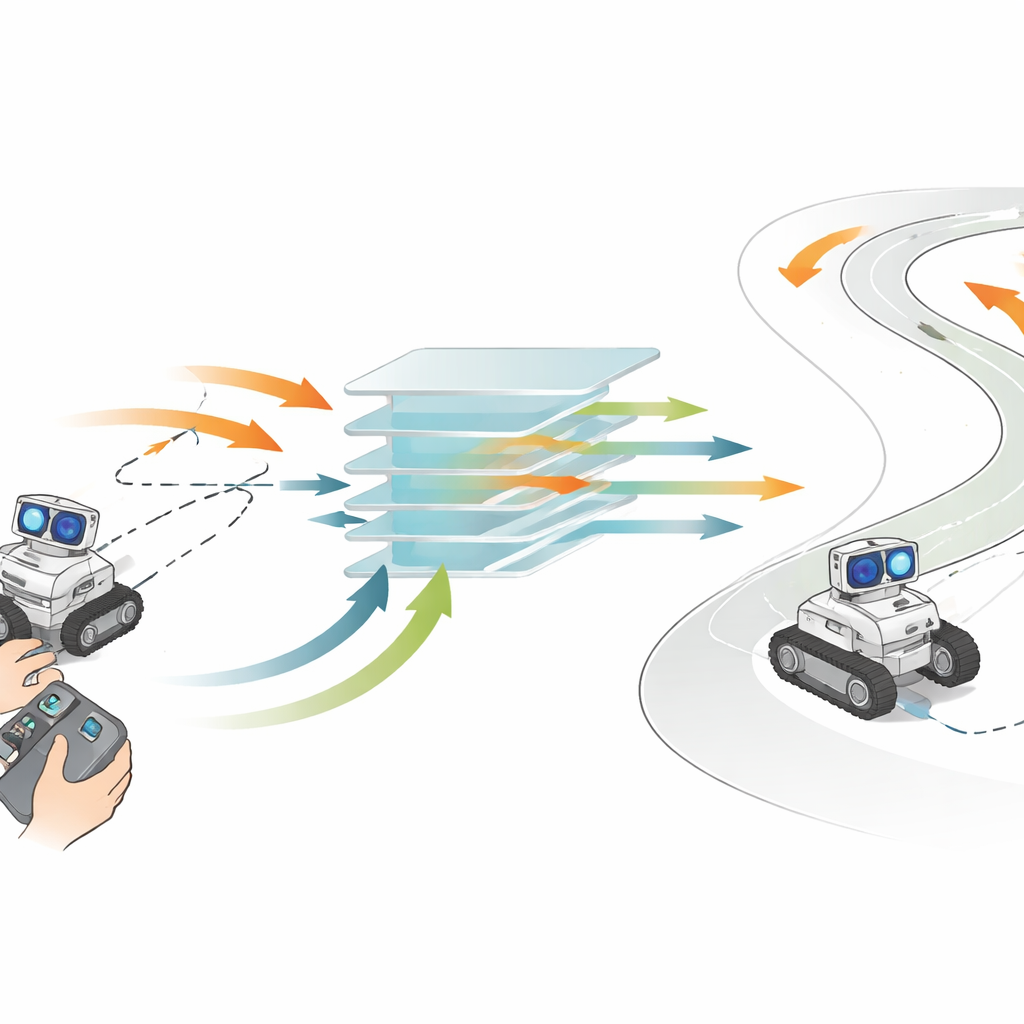
Testning av robotar på ramper, kurvor och konstgjorda stormar
För att undersöka FLAIRs förmågor genomförde teamet mer än 700 experiment med en banddriven robot på inomhusbana. En bana innehöll tajta S‑formade kurvor; en annan kombinerade en hal ramp med en simulerad vindsektion där externa fläktar tryckte roboten i sidled; en tredje lade till gupp och hinder för att skaka sensorerna och introducera extra brus. Forskarna simulerade olika typer av problem: statiska skador (som ett permanent försvagat band), dynamiska skador som ändrades över tid, och tillståndsberoende effekter där störningen berodde på position eller kurs, vilket efterliknar verkliga fenomen som Bernoulli‑krafter som drar fartyg mot kanalväggar. En automatisk förare följde samma banor med och utan FLAIR, och teamet jämförde hur väl robotens bana överensstämde med kommandona och hur lång tid det tog att fullfölja varje varv.
Återfå kontroll snabbare än befintliga metoder
Över alla testsektioner minskade FLAIR avvikelsen mellan kommenderad och faktisk rörelse med ungefär tre fjärdedelar och förkortade varvtiderna med ungefär samma andel, vilket förde prestandan nära den hos en ostörd robot. På en särskilt utmanande ramp med både slir och hårdvaruskada återställde det effektivt full manöverbarhet, medan standardmetoder som optimala och adaptiva regulatorer som bäst bara halverade felet. En onlinebaserad förstärkningsinlärningsbaseline misslyckades helt och blev osäker innan den hann anpassa sig. FLAIR visade sig också robust när störningen ändrades mitt under körningen: det upptäckte att den tidigare modellen inte längre stämde överens med verkligheten, rensade sitt minne och lärde in en ny beskrivning på sekunder, vilket höll roboten styrbar även när förhållandena skiftade. Samma strategi fungerade i en simulering av en sexbent robot med många leder, där FLAIR hjälpte till att kompensera för en försvagad fot.
Se vad roboten upplever
Utöver att hålla robotar på rätt spår erbjuder FLAIR en inblick i deras värld. Eftersom det modellerar hur störningar varierar med position och riktning kan det visa en operatör var krafterna är som starkast—nära kanten av en kanal, vid en viss rampvinkel eller när man står mot vinden. Denna "självinsikt" förvandlar systemet till ett diagnostiskt verktyg som antyder om problemet troligen beror på slitage, terräng eller en extern knuff, och föreslår säkrare rutter som undviker hög‑riskområden. Viktigt är att metoden endast förlitar sig på robotens befintliga sensorer och omborddator, så den kan köras ute i fält utan molnanslutningar eller förhandsinsamlad träningsdata.
Vad detta innebär för vardagsrobotik
Studien visar att ett lättviktigt inlärningslager kan göra robotar mycket mer motståndskraftiga mot överraskningar, utan perfekta modeller för varje tänkbar störning. Så länge de korrigerande krafterna ligger inom vad motorerna fysiskt kan leverera kan FLAIR snabbt lära om hur mänskliga kommandon ska översättas till rätt lågnivååtgärder, även i ojämn terräng och under föränderliga förhållanden. För icke‑experter betyder det att framtida markfordon, leveransrobotar eller utforskningsmaskiner kan bete sig mer som pålitliga verktyg—fortsätta att "göra det du menar" när omgivningen bråkar, och ge ledtrådar när gränserna nås, i stället för att plötsligt köra ur kurs.
Citering: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
Nyckelord: robotmotståndskraft, kontroll med onlineinlärning, autonoma fordon, robotåterhämtning vid skador, adaptiv robotik