Clear Sky Science · ja
オンライン学習で予期せぬ事態における制御を再構築しロボットを軌道に戻す
ロボットを制御下に置くことが重要な理由
ロボットは工場の床を離れ、都市の通り、農地、災害現場、さらには航路など、混雑し予測しにくい場所へ進出しています。こうした環境では、突風、氷の斑点、損傷した車輪などがロボットを設計者の想定外の挙動に導き、人や財産、任務を危険にさらすことがあります。本稿ではFLAIRという、高速に学習する付加レイヤーを紹介します。FLAIRは、内部構造を一からやり直すことなく、予期せぬ事態が起きたときでもロボットを人間の制御下に留める手助けをします。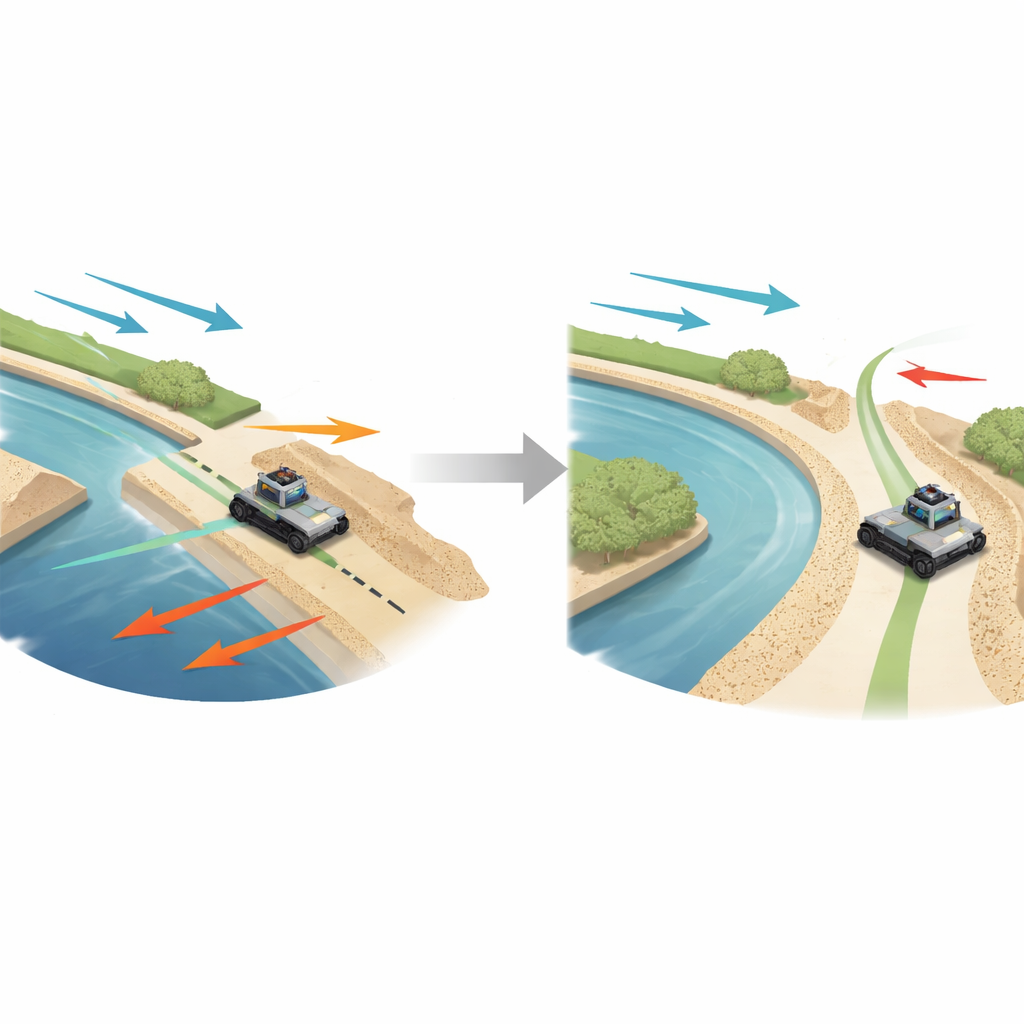
現実世界とロボットの対立
多くのロボットやスマート車両は、技術者が予見して扱える条件――倉庫の乾いた床、明瞭に区分された道路、安定したハードウェア――に合わせて調整されています。しかし現実世界では事態は悪化します。貨物の移動で重心が変わったり、履帯が摩耗したり、路面が滑りやすくなったり、横風や水流といった外力で車両が進路を逸らされることがあります。そうしたとき、操作者がジョイスティックを前に倒しても機体は横に流れていく――という事態が起こりえます。著者らは、操作者の期待とロボットの応答が一致している状態を「操縦可能」と定義しますが、強い擾乱下ではその関係が断絶し、船が運河をふさぐような事故につながることがあります。課題は、その直感的な「指示と運動」の結びつきを、事前に想定されていない擾乱が起きても素早く取り戻すことです。
既存コントローラの上に載せる学習レイヤー
すべての可能な事故に対してロボットの低レベルコントローラを作り直す代わりに、研究者らはFLAIR(Fast Learning‑Based Adaptation for Immediate Recovery)という新しい高レベル層を追加しました。FLAIRは操作者が送る「前進」や「左折」といった同じ指令を監視し、搭載センサーでロボットの実際の動きを観察します。意図した動きと実際の動きを比較することで、片側の履帯のグリップ低下や横風といった、現在機体を乱している要因をコンパクトな数式で表現することを学習します。225ミリ秒ごとに内部のモデルを更新し、元のコントローラに渡す前の指令をわずかに補正します。人間にとって理解しやすくするために、FLAIRは不透明な深層ネットワークではなくシンプルな曲線で全体の擾乱を表現し、空間的にどの位置やどの方向が危険かを示すことができます。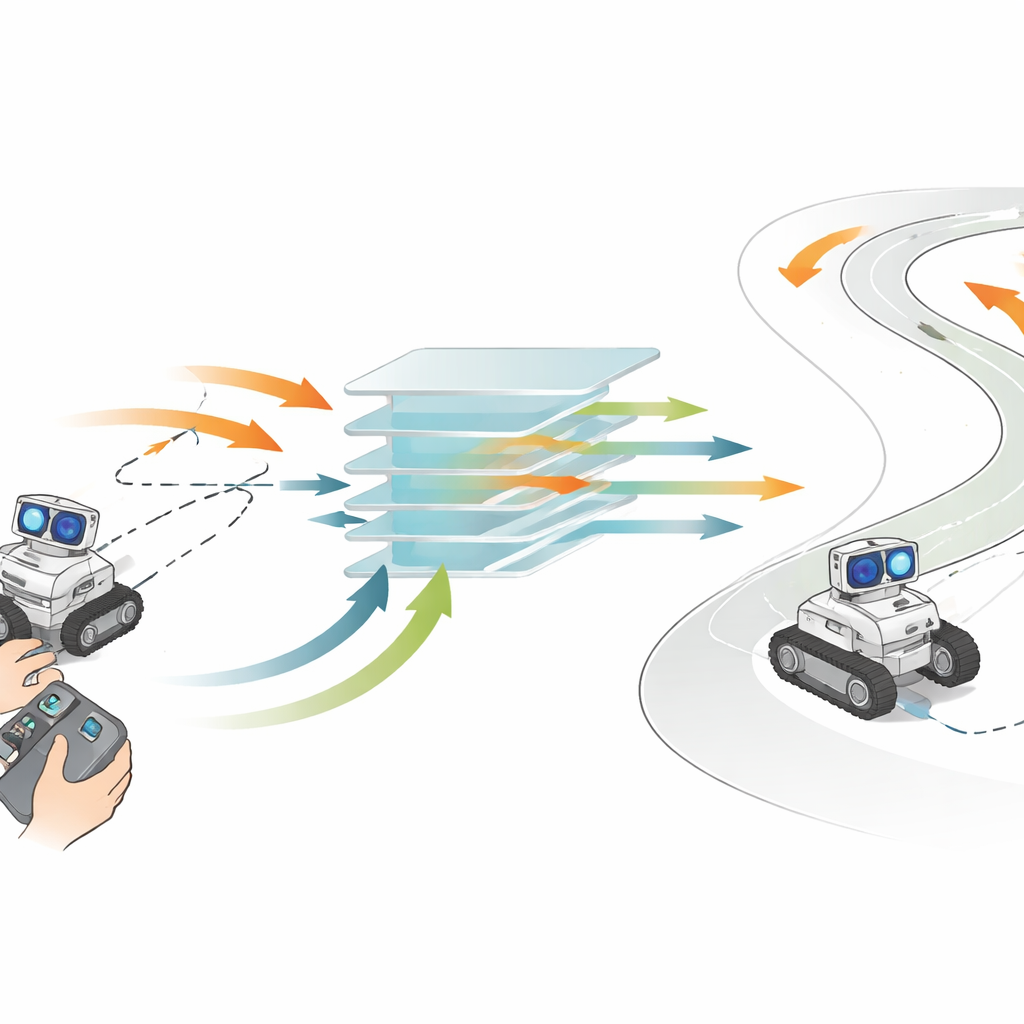
坂道、曲線、人工的な嵐での試験
FLAIRの能力を検証するため、チームは屋内テストコースで履帯式ロボットを用いて700回以上の実験を行いました。ひとつのコースはタイトなS字カーブを含み、別のコースは滑りやすい斜面と外部ファンによる横風区間を組み合わせ、三つ目はセンサーを揺さぶる段差や障害物を加えて追加のノイズを導入しました。研究者らは静的な損傷(恒久的に弱った履帯のようなもの)、時間とともに変化する動的な損傷、位置や方位に依存して擾乱が変わる状態依存的な効果(運河の壁に引き寄せるベルヌーイ力のような現象を想起させます)など、さまざまなトラブルをシミュレートしました。自動運転はFLAIRあり/なしで同一経路を走行し、指令と実際の軌跡の一致度や周回にかかった時間を比較しました。
既存手法より速く制御を回復
すべてのテスト区間で、FLAIRは指令と実際の動きの不一致を約4分の1に削減し、周回時間もほぼ同じ割合で短縮して、ほぼ無擾乱時と同等の性能に近づけました。特に滑りとハードウェア損傷が混在する難しい斜面では、FLAIRは実質的に完全な操縦可能性を回復しましたが、標準的な最適制御器や適応制御器はせいぜい誤差を半分にできるにとどまりました。オンライン強化学習のベースラインは適応する前に安全性を損ない失敗しました。FLAIRは擾乱が走行中に変化しても頑健であることが示されました:以前のモデルが現実に合わなくなると検出して記憶をクリアし、数秒で新しい記述を学び直して機体の操縦性を維持しました。同じ戦略は多関節を持つシミュレーションの六脚ロボットにも適用され、弱った脚の補償に役立ちました。
ロボットが感じているものを見る
軌道を保つこと以上に、FLAIRはロボットの「感じている世界」を可視化する窓にもなります。擾乱が位置や方向とともにどのように変化するかをモデル化することで、操作者に対してどこで力が強いか――運河の縁付近、特定の斜面角度、あるいは風向きに向かうとき――を示すことができます。この「内省」は診断ツールとして機能し、問題が摩耗、地形、それとも外部からの押しによるものかを示唆し、高リスク領域を避けるより安全な経路を提案します。重要なのは、この手法がロボットの既存のセンサーと搭載コンピュータだけに依存するため、クラウド接続や事前収集したトレーニングデータなしに現場で動作できることです。
日常のロボティクスにとっての意義
本研究は、軽量な学習レイヤーがすべての可能な擾乱の完璧なモデルを持たなくても、ロボットを驚きに対してはるかに頑健にできることを示しています。補正力がモーターの物理的供給能力の範囲内であれば、FLAIRは人間の指示を適切な低レベルの動作に素早く再学習し、荒れた地形や変化する条件下でも有効に働きます。非専門家にとっては、将来の地上車両、配達ロボット、探査機がより信頼できる道具のように振る舞い、環境が乱れても「あなたの意図を実行し続ける」ことが期待でき、限界に達したときには突如進路を逸らすのではなくその徴候を示してくれることを意味します。
引用: Allard, M., Flageat, M., Lim, B. et al. Getting robots back on track by reconstituting control in unexpected situations with online learning. Nat Commun 17, 3715 (2026). https://doi.org/10.1038/s41467-026-70256-y
キーワード: ロボットの回復力, オンライン学習制御, 自律走行車, ロボットの損傷回復, 適応ロボティクス