Clear Sky Science · sv
Noggrannhet vid placering av tandimplantat med dynamisk eller statisk datorstött implantatkirurgi: en randomiserad kontrollerad klinisk prövning
Att få tandimplantat på rätt plats
När någon får ett tandimplantat måste metallskruven placeras med millimeternoggrannhet. Hamnar den för nära en nerv, sinus eller en intilliggande tand kan problem uppstå flera år senare. Idag förlitar sig tandläkare i allt större utsträckning på datorstyrning för att borra exakt på rätt ställe. Denna studie ställer en praktisk fråga som är viktig både för patienter och kliniker: placerar nyare kamerguiderade system implantat lika exakt som traditionella plastborrguider?
Två sätt att styra tandläkarens hand
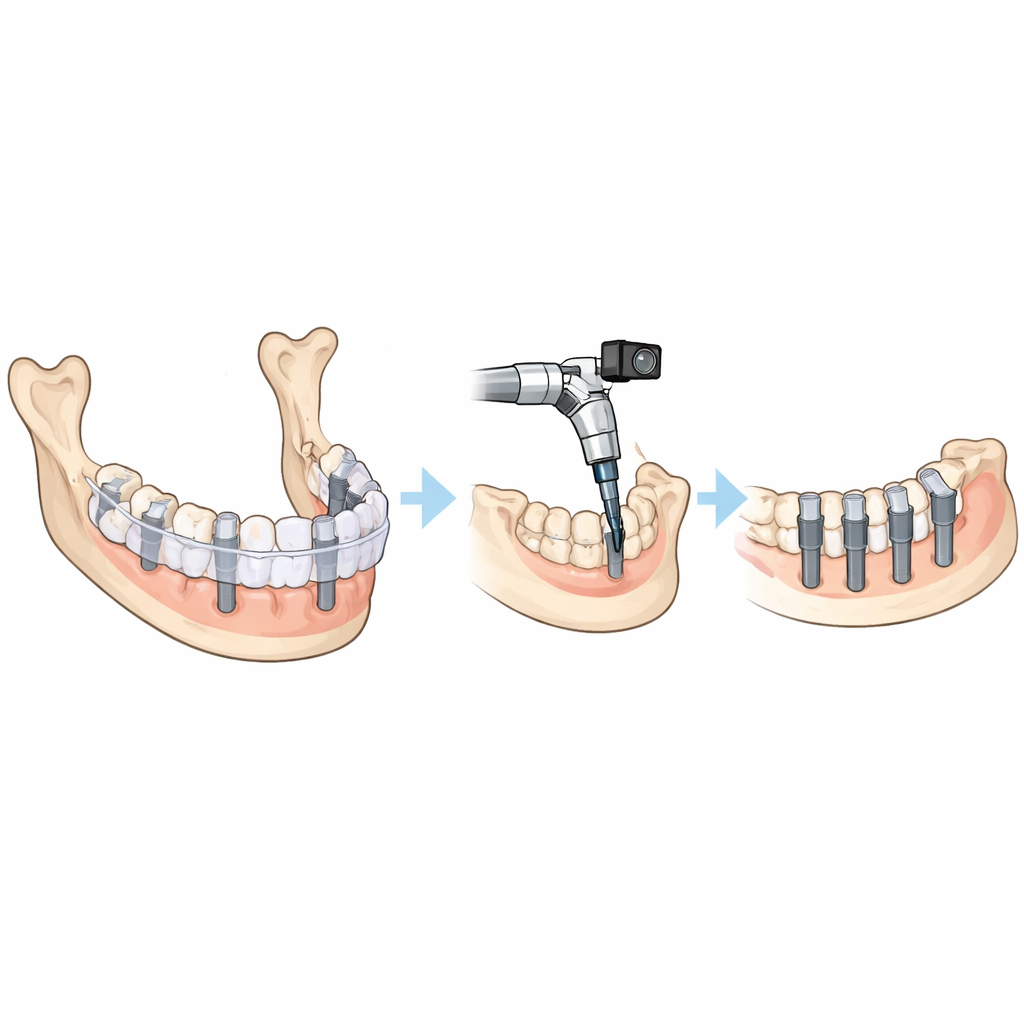
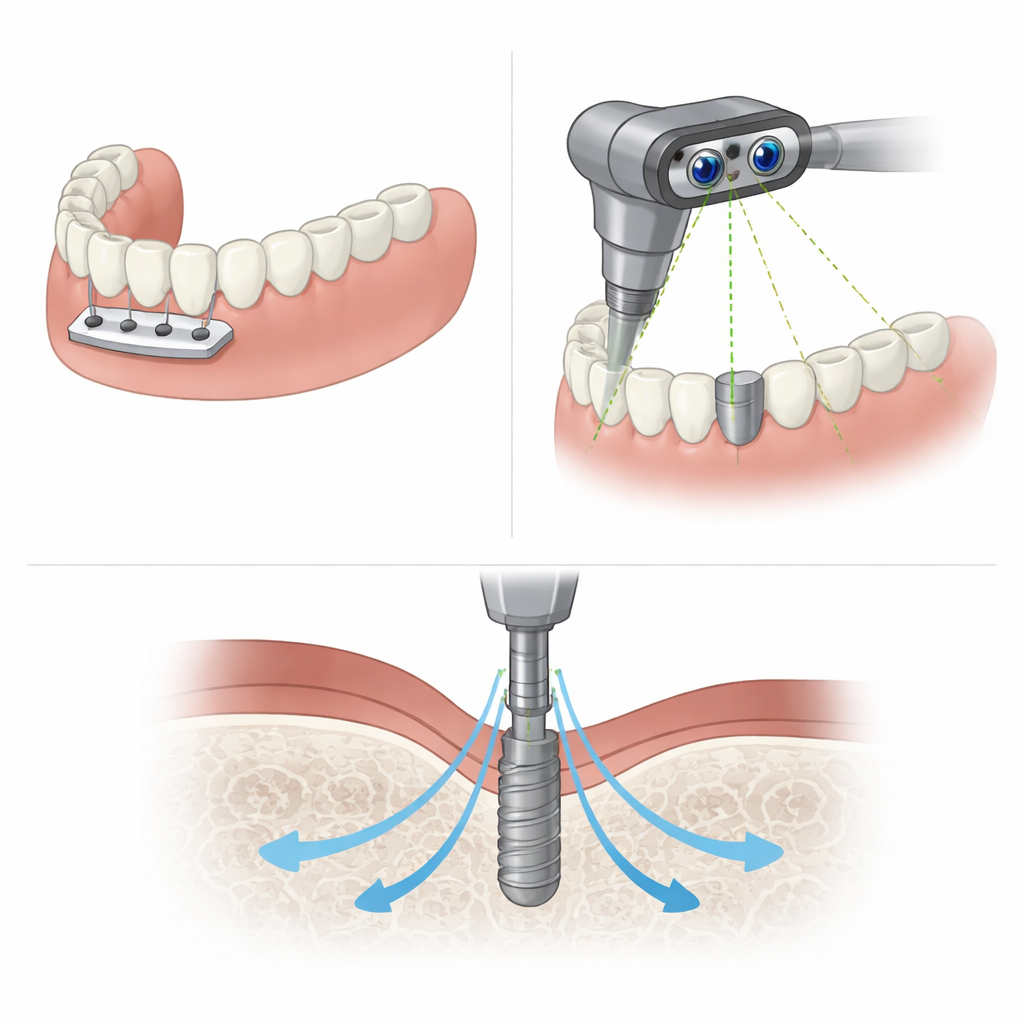
Studien jämför två huvudsakliga former av datorstödd implantatkirurgi. I den statiska metoden tillverkas en styv plastguide från en 3D-skanning och klickas på tänderna eller tandköttet. Den innehåller metallsjöar som styr borren längs en fast bana. I den dynamiska metoden planeras implantatet också i en 3D-skanning, men det finns ingen skrymmande guide i munnen. Istället fästs en liten referensplatta på tänderna och en miniatyr stereokamera monteras på borrhandstycket. När tandläkaren arbetar följer systemet borren i realtid mot patientens 3D-skanning och visar dess position på en skärm, vilket möjliggör kontinuerlig justering.
Hur prövningen genomfördes
Författarna genomförde en randomiserad klinisk prövning med 45 vuxna som behövde minst ett implantat, totalt 70 implantat. Varje patient fick en cone beam CT-skanning och implantaten positionerades virtuellt i planeringsprogrammet enligt den ideala framtida tandformen. Varje person tilldelades slumpmässigt antingen det kamerguidebaserade dynamiska systemet (DENACAM) eller statiska guider från en etablerad tillverkare. Samma erfarna kirurg placerade alla implantat och följde en identisk borrsekvens i båda grupperna, där det enda som skiljde var hur borren styrdes.
Mäta små skillnader efter läkning
Efter ungefär tre månaders läkning nöjde sig teamet inte med att bara bedöma om implantaten såg raka ut. Istället registrerade de den exakta slutliga positionen för varje implantat genom att ta ett precist avtryck, skapa en gipsmodell och skanna den i 3D. De lade sedan digitalt detta resultat över originalplanen och beräknade hur långt varje implantats bas, spets och vinkel avvek från målet. De undersökte fullständiga 3D-skillnader såväl som enklare fram–bak, kind–tunga och upp–ner förskjutningar. Slutligen bedömde kirurgen hur bekväm varje metod kändes att använda under ingreppet.
Vad siffrorna visade
Huvudfyndet var att båda metoderna var likvärdigt exakta. I genomsnitt avvek implantat placerade med det dynamiska kamerasystemet från planen med ungefär 5 grader i vinkel och cirka 1,8–2,0 millimeter i position. Statiska guider gav nästan identiska resultat, med avvikelser väl inom vanligt accepterade säkerhetsmarginaler runt viktiga anatomiska strukturer. Statistiska tester fann ingen meningsfull skillnad mellan de två teknikerna för någon av de uppmätta avstånden eller vinklarna. Kirurgens ergonomiska bedömningar var också lika, vilket tyder på att det miniaturiserade camerasystemet var lika användbart i praktiken som den etablerade guidebaserade metoden.
Vad detta betyder för patienter och tandläkare
För patienter är budskapet lugnande: både kamerguidad metod och guideplatta kan på ett tillförlitligt sätt överföra en noggrant planerad implantatposition till munnen med små, kliniskt acceptabla fel. Det nyare dynamiska systemet framstår som ett säkert alternativ som ger flexibilitet att finjustera borrbanan under operationen, vilket kan vara särskilt hjälpsamt i trånga eller besvärliga utrymmen. Valet mellan de två tillvägagångssätten kommer troligen att bero på individens anatomi, hur komplext fallet är, samt tandläkarens preferens och erfarenhet, snarare än på stora skillnader i noggrannhet.
Citering: Huth, K.C., Hrkal, J., Čičmanec, M. et al. Accuracy of dental implant positioning by dynamic or static computer-assisted implant surgery: a randomized controlled clinical trial. Sci Rep 16, 10997 (2026). https://doi.org/10.1038/s41598-026-45931-1
Nyckelord: tandimplantat, datorstyrd kirurgi, dynamisk navigering, kirurgiska guider, implantatnoggrannhet