Clear Sky Science · nl
Nauwkeurigheid van tandimplantaatpositionering met dynamische of statische computerondersteunde implantaatchirurgie: een gerandomiseerde gecontroleerde klinische studie
Tandimplantaten op de juiste plaats krijgen
Wanneer iemand een tandimplantaat krijgt, moet de metalen schroef met millimeternauwkeurigheid worden geplaatst. Als deze te dicht bij een zenuw, de sinus of een aangrenzende tand terechtkomt, kunnen er jaren later problemen optreden. Tegenwoordig vertrouwen tandartsen steeds vaker op computergeleiding om exact op de juiste plek te boren. Deze studie stelt een praktische vraag die zowel voor patiënten als klinici belangrijk is: plaatsen nieuwere, camera-gestuurde systemen implantaten even nauwkeurig als traditionele plastic boorsjablonen?
Twee manieren om de hand van de tandarts te geleiden
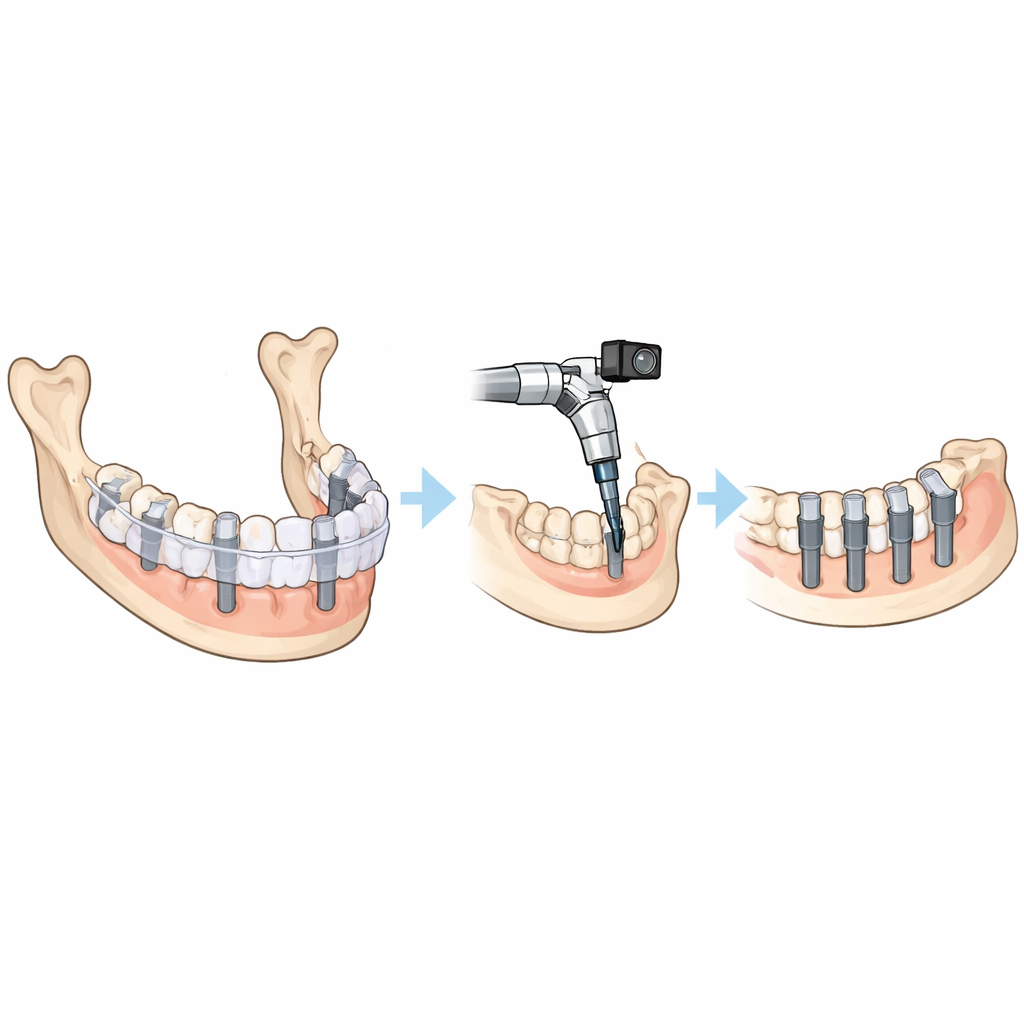
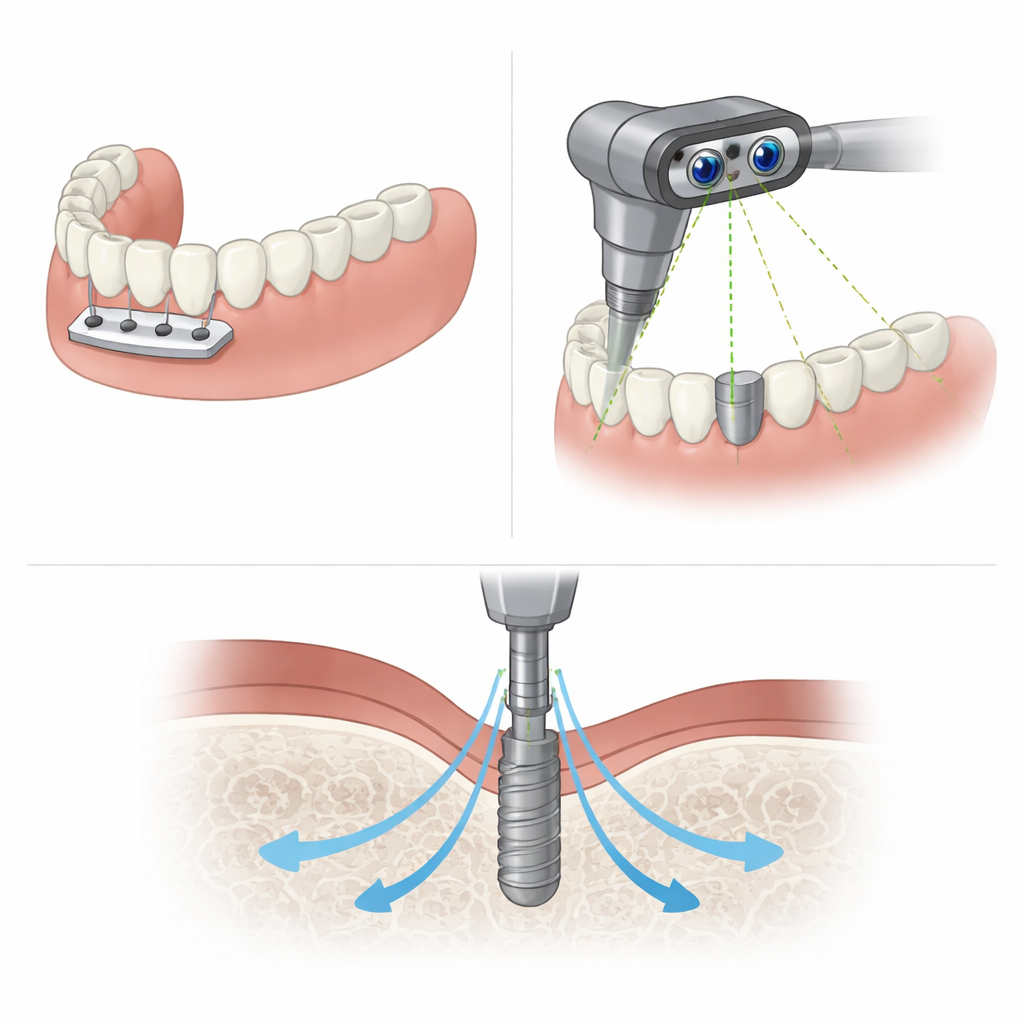
Het onderzoek vergelijkt twee hoofdtypen computerondersteunde implantaatchirurgie. Bij de statische methode wordt een stijve plastic guide geproduceerd op basis van een 3D-scan en op de tanden of het tandvlees geklikt. Deze bevat metalen hulzen die de boor langs een vaste baan sturen. Bij de dynamische methode wordt het implantaat ook op een 3D-scan gepland, maar zit er geen omvangrijke guide in de mond. In plaats daarvan wordt een kleine referentieplaat aan de tanden bevestigd en wordt er een miniatuurtje stereo-camera op het boorhandstuk gemonteerd. Terwijl de tandarts werkt, volgt het systeem de boor in realtime ten opzichte van de 3D-scan van de patiënt en toont de positie op een scherm, waardoor continue aanpassing mogelijk is.
Hoe de proef werd uitgevoerd
De auteurs voerden een gerandomiseerde klinische trial uit met 45 volwassenen die minstens één implantaat nodig hadden, in totaal 70 implantaten. Elke patiënt onderging een cone beam CT-scan en implantaten werden virtueel gepositioneerd in planningssoftware volgens de ideale toekomstige tandvorm. Iedere persoon werd willekeurig toegewezen aan ofwel het camera-gestuurde dynamische systeem (DENACAM) ofwel aan statische guides van een gevestigde fabrikant. Dezelfde ervaren chirurg plaatste alle implantaten en volgde in beide groepen een identieke boorsequentie, die alleen verschilden in de manier waarop de boor werd geleid.
Kleine verschillen meten na genezing
Na ongeveer drie maanden genezing keek het team niet simpelweg of de implantaten er recht uitzagen. In plaats daarvan registreerden ze de exacte uiteindelijke positie van elk implantaat door een nauwkeurige afdruk te nemen, een gipsmodel te maken en dat in 3D te scannen. Ze overlayden dit resultaat digitaal op het oorspronkelijke plan en berekenden hoe ver de basis, de tip en de hoek van elk implantaat van het doel afweken. Ze bekeken volledige 3D-verschillen evenals eenvoudigere voor–achter-, wang–tong- en boven–onderverschuivingen. Ten slotte beoordeelde de chirurg hoe comfortabel elke methode aanvoelde tijdens de operatie.
Wat de cijfers lieten zien
De belangrijkste bevinding was dat beide methoden vergelijkbaar nauwkeurig waren. Gemiddeld week bij het dynamische camerasysteem de hoek van het geplaatste implantaat ongeveer 5 graden af van het plan en de positie ongeveer 1,8–2,0 millimeter. Statische guides leverden vrijwel identieke resultaten op, met afwijkingen die ruim binnen de algemeen aanvaarde veiligheidsmarges rond belangrijke anatomische structuren lagen. Statistische toetsen vonden geen betekenisvol verschil tussen de twee technieken voor enige gemeten afstanden of hoeken. De ergonomische beoordelingen van de chirurg waren eveneens gelijk, wat suggereert dat het miniatuurcamerasysteem in de praktijk net zo goed bruikbaar was als de gevestigde sjabloon-gebaseerde aanpak.
Wat dit betekent voor patiënten en tandartsen
Voor patiënten is de boodschap geruststellend: zowel de camera-gestuurde als de guide-plate-methode kunnen een zorgvuldig geplande implantaatpositie betrouwbaar naar de mond overbrengen met kleine, klinisch aanvaardbare fouten. Het nieuwere dynamische systeem lijkt een veilig alternatief dat de flexibiliteit biedt om het boorpad tijdens de operatie bij te stellen, wat vooral nuttig kan zijn in krappe of lastige situaties. De keuze tussen de twee benaderingen zal waarschijnlijk afhangen van de individuele anatomie, de complexiteit van het geval en de voorkeur en ervaring van de tandarts, eerder dan van grote verschillen in nauwkeurigheid.
Bronvermelding: Huth, K.C., Hrkal, J., Čičmanec, M. et al. Accuracy of dental implant positioning by dynamic or static computer-assisted implant surgery: a randomized controlled clinical trial. Sci Rep 16, 10997 (2026). https://doi.org/10.1038/s41598-026-45931-1
Trefwoorden: tandimplantaten, computergeleide chirurgie, dynamische navigatie, chirurgische guides, implantaatnauwkeurigheid