Clear Sky Science · ar
دقة وضع زراعة الأسنان باستخدام الجراحة المساعدة بالكمبيوتر الديناميكية أو الثابتة: تجربة سريرية عشوائية مضبوطة
وضع زرعات الأسنان في المكان الصحيح
عند تلقي أحدهم لزرعة سن، يجب وضع المسمار المعدني بدقة تصل إلى مليمترات قليلة. إذا انتهى به الأمر بالقرب الشديد من عصب، أو الجيب الأنفي، أو السن المجاور، فقد تنشأ مشاكل بعد سنوات. اليوم يعتمد أطباء الأسنان بصورة متزايدة على التوجيه الحاسوبي لمساعدتهم في الحفر في الموقع الصحيح تمامًا. تسأل هذه الدراسة سؤالًا عمليًا يهم المرضى والأطباء على حد سواء: هل تقوم الأنظمة الحديثة الموجهة بالكاميرا بوضع الزرعات بدقة مماثلة للأدلة البلاستيكية التقليدية الخاصة بالحفر؟
طريقتان لتوجيه يد الطبيب
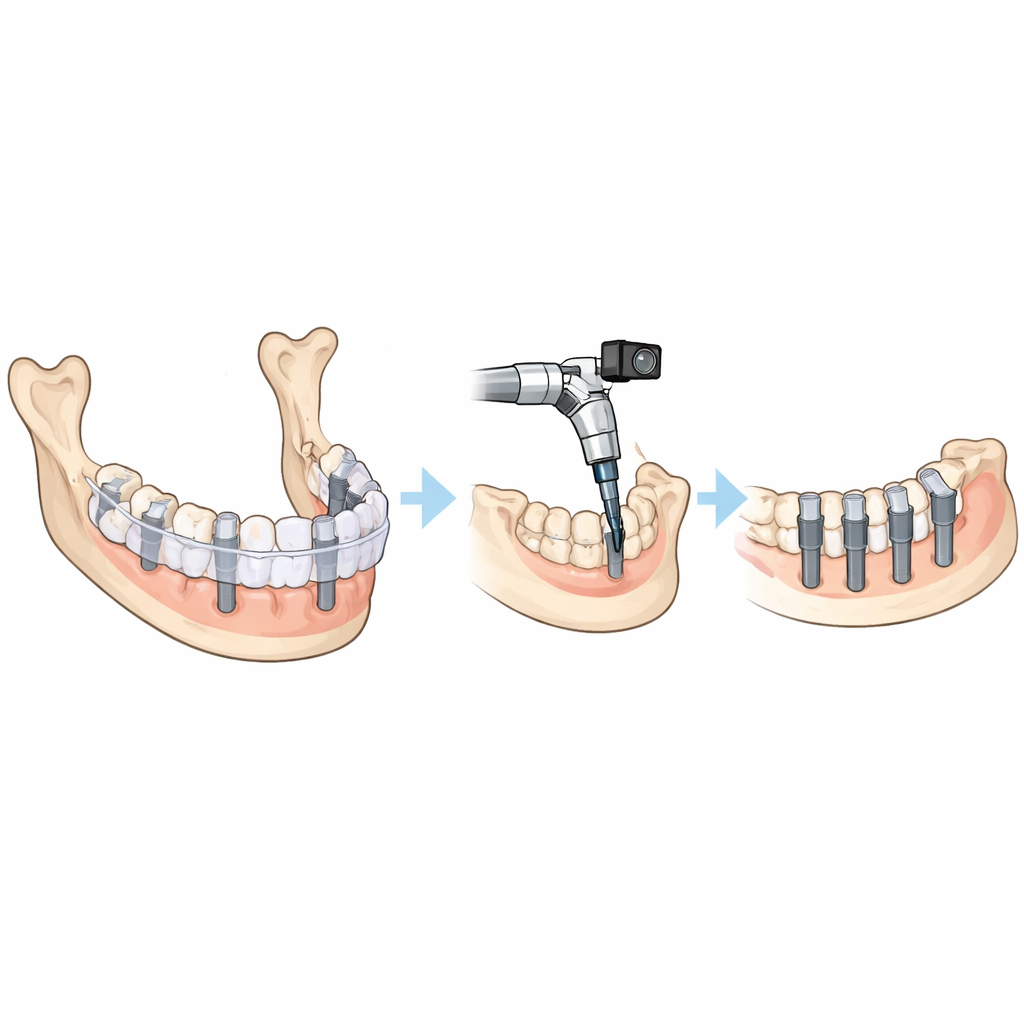
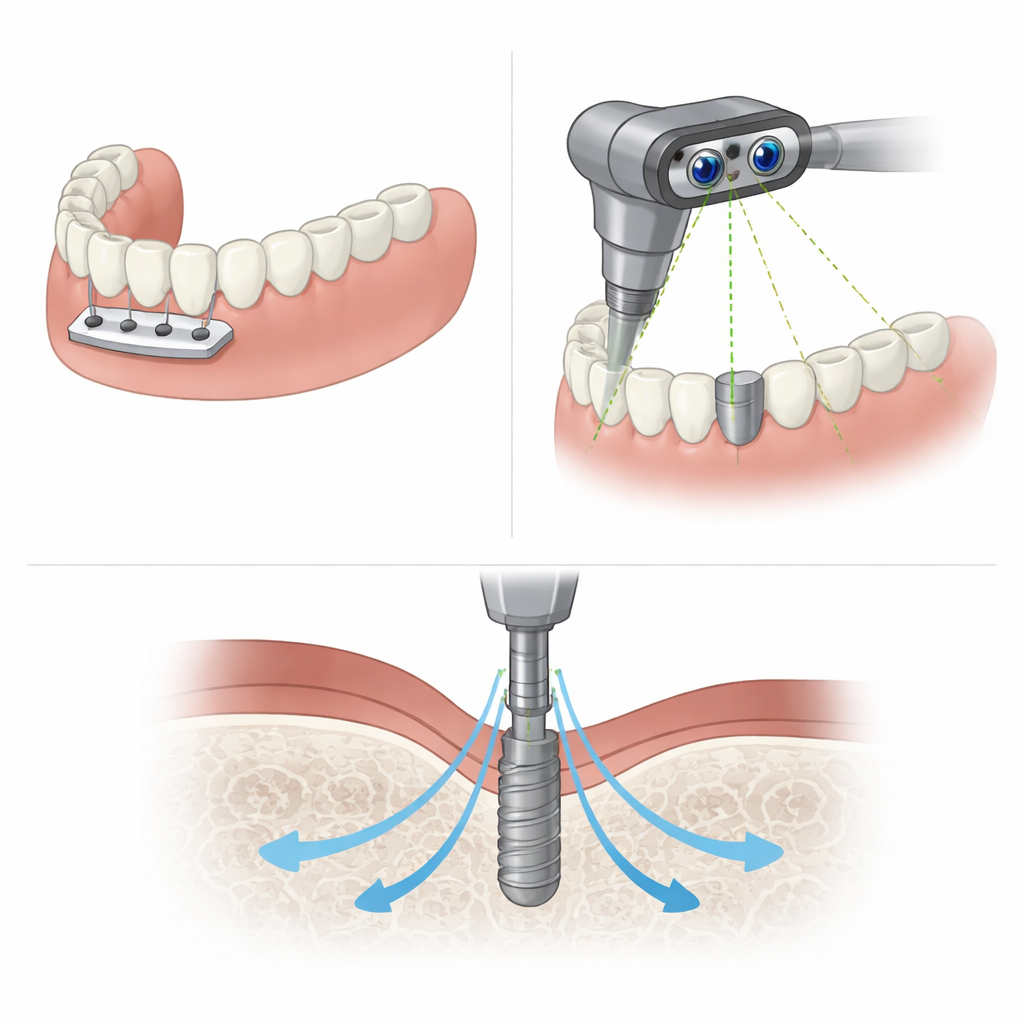
تقارن الدراسة بين نمطين رئيسيين للجراحة المساعدة بالحاسوب. في الطريقة الثابتة، يُنتَج دليل بلاستيكي صلب من مسح ثلاثي الأبعاد ويُثبت على الأسنان أو اللثة. يحتوي على أكمام معدنية توجه المثقاب على مسار ثابت. في الطريقة الديناميكية، تُخطط الزرعة أيضًا على المسح ثلاثي الأبعاد، لكن لا يوجد دليل ضخم في الفم. بدلاً من ذلك، يُثبت لوح مرجعي صغير على الأسنان وتُركب كاميرا ستيريو صغيرة على مقبض المثقاب. أثناء عمل الطبيب، يتتبع النظام وضع المثقاب في الوقت الحقيقي بالنسبة لمسح المريض ثلاثي الأبعاد ويعرض موضعه على الشاشة، مما يسمح بتعديلات مستمرة.
كيف أُجريت التجربة
أجرى المؤلفون تجربة سريرية عشوائية شملت 45 بالغًا كانوا بحاجة إلى زراعة واحدة على الأقل، ليصل العدد الإجمالي للزرعات إلى 70. خضع كل مريض لمسح مقطعي شعاعي مدور (cone beam CT)، وتم وضع الزرعات افتراضيًا في برنامج التخطيط وفقًا لشكل السن المستقبلي المثالي. تم توزيع كل شخص عشوائيًا إما إلى نظام ديناميكي موجه بالكاميرا (DENACAM) أو إلى أدلة ثابتة مصنوعة بواسطة شركة معروفة. نفس الجراح المتمرس وضع كل الزرعات وتبع تسلسلاً متطابقًا للحفر في المجموعتين، والاختلاف الوحيد كان في طريقة توجيه المثقاب.
قياس الفروقات الطفيفة بعد الشفاء
بعد حوالي ثلاثة أشهر من الشفاء، لم يكتفِ الفريق بتقييم ما إذا كانت الزرعات تبدو مستقيمة بالعين. بل سجلوا الموقع النهائي الدقيق لكل زرعة عن طريق أخذ انطباع دقيق، وصنع نموذج حجري، ومسحه ثلاثي الأبعاد. ثم قاموا بتراكب هذا الناتج رقميًا على الخطة الأصلية وحسبوا المسافة التي انحرفت بها قاعدة كل زرعة ورأسها وزاويتها عن الهدف. درسوا الاختلافات الثلاثية الأبعاد الكاملة وكذلك التحركات الأمامية–الخلفية، والخد–اللسان، والأعلى–الأسفل. أخيرًا، قيّم الجراح مدى راحة استخدام كل طريقة أثناء العملية.
ماذا أظهرت الأرقام
كانت النتيجة الرئيسية أن الطريقتين كانتا متشابهتين في الدقة. في المتوسط، اختلفت الزرعات الموضوعة بالنظام الديناميكي الموجه بالكاميرا عن الخطة بنحو 5 درجات في الزاوية وما يقارب 1.8–2.0 مليمتر في الموضع. وقد أعطت الأدلة الثابتة نتائج شبه متطابقة، مع انحرافات ضمن هوامش السلامة المقبولة عادة حول الهياكل التشريحية الهامة. لم تُظهِر الاختبارات الإحصائية فروقًا ذات معنى بين التقنيتين لأي من المسافات أو الزوايا المقاسة. كما كانت تقييمات راحة الجراح متقاربة، ما يوحي بأن نظام الكاميرا المصغر عملي بنفس درجة المنهج القائم على القالب التقليدي.
ماذا يعني هذا للمرضى وأطباء الأسنان
بالنسبة للمرضى، الرسالة مطمئنة: كلا الطريقتين، الموجهة بالكاميرا وعن طريق لوحة الدليل، يمكنهما نقل موقع الزرع المخطط له بعناية إلى الفم بأخطاء صغيرة ومقبولة سريريًا. يبدو أن النظام الديناميكي الأحدث بديل آمن ويضيف مرونة لتعديل مسار المثقاب أثناء الجراحة، وهو ما قد يكون مفيدًا خاصة في المساحات الضيقة أو المزعجة. سيعتمد الاختيار بين النهجين على الأرجح على تشريح المريض الفردي، وتعقيد الحالة، وتفضيل وخبرة الطبيب، بدلًا من اختلافات كبيرة في الدقة.
الاستشهاد: Huth, K.C., Hrkal, J., Čičmanec, M. et al. Accuracy of dental implant positioning by dynamic or static computer-assisted implant surgery: a randomized controlled clinical trial. Sci Rep 16, 10997 (2026). https://doi.org/10.1038/s41598-026-45931-1
الكلمات المفتاحية: زرعات الأسنان, جراحة موجهة بالحاسوب, التنقّل الديناميكي, الأدلة الجراحية, دقة الزرع