Clear Sky Science · pl
Dokładność pozycjonowania implantów stomatologicznych przy użyciu dynamicznej lub statycznej chirurgii wspomaganej komputerowo: randomizowane, kontrolowane badanie kliniczne
Umieszczanie implantów stomatologicznych we właściwym miejscu
Gdy pacjent otrzymuje implant stomatologiczny, metalową śrubę trzeba umieścić z precyzją rzędu milimetrów. Jeśli znajdzie się zbyt blisko nerwu, zatoki lub sąsiedniego zęba, mogą pojawić się problemy nawet po wielu latach. Dziś stomatolodzy coraz częściej korzystają z prowadzenia komputerowego, które pomaga nawiercać dokładnie w wyznaczonym miejscu. W badaniu postawiono praktyczne pytanie istotne dla pacjentów i lekarzy: czy nowsze systemy prowadzone kamerą umieszczają implanty tak samo dokładnie jak tradycyjne plastikowe prowadnice do wiercenia?
Dwa sposoby prowadzenia ręki lekarza
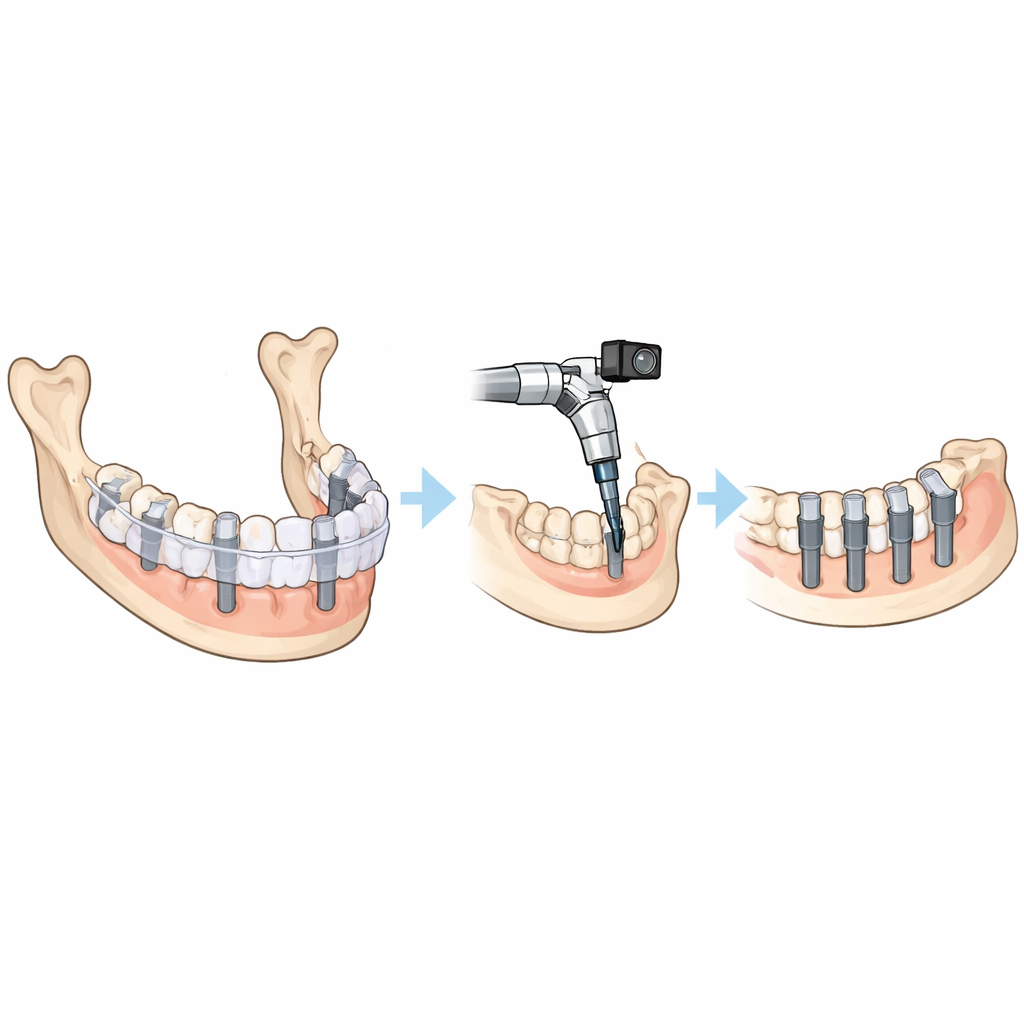
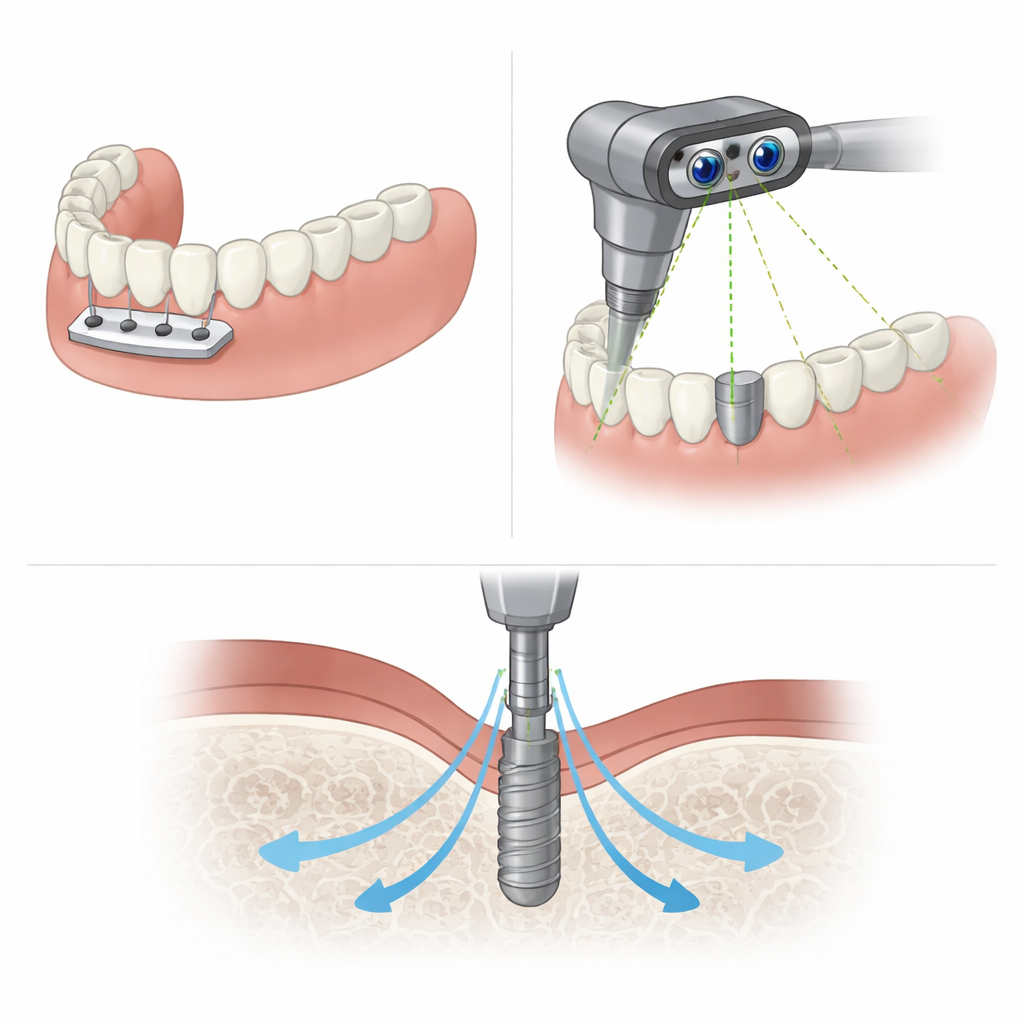
Badanie porównuje dwa główne style chirurgii wspomaganej komputerowo. W metodzie statycznej wykonuje się sztywny plastikowy szablon na podstawie skanu 3D i zakłada go na zęby lub dziąsła. Zawiera on metalowe tuleje, które kierują wiertło po ustalonej trajektorii. W metodzie dynamicznej plan implantu również powstaje na skanie 3D, ale w jamie ustnej nie ma obszernego szablonu. Zamiast tego do zębów przymocowuje się małą płytkę odniesienia, a na rękojeści wiertła montuje się miniaturową kamerę stereo. W trakcie pracy system śledzi pozycję wiertła w czasie rzeczywistym względem skanu 3D pacjenta i wyświetla ją na ekranie, co umożliwia ciągłe korygowanie.
Jak przeprowadzono trial
Autorzy przeprowadzili randomizowane badanie kliniczne z udziałem 45 dorosłych osób wymagających co najmniej jednego implantu, łącznie 70 implantów. Każdy pacjent miał wykonany tomogram stożkowo-wiązowy (CBCT), a implanty były wirtualnie rozmieszczane w oprogramowaniu planistycznym zgodnie z idealnym kształtem przyszłego zęba. Każda osoba została losowo przydzielona albo do systemu dynamicznego prowadzonego kamerą (DENACAM), albo do statycznych szablonów wyprodukowanych przez uznanego producenta. Ten sam doświadczony chirurg wszczepił wszystkie implanty, stosując identyczną sekwencję wierceń w obu grupach, różniącą się jedynie sposobem prowadzenia wiertła.
Pomiary drobnych różnic po gojeniu
Po około trzech miesiącach gojenia zespół nie ograniczył się do oceny wzrokowej, czy implant jest prosty. Zamiast tego zarejestrowano dokładną końcową pozycję każdego implantu, wykonując precyzyjny wycisk, tworząc gipsowy model i skanując go w 3D. Następnie cyfrowo nałożono ten wynik na pierwotny plan i obliczono, o ile baza, koniec i kąt każdego implantu odbiegły od celu. Analizowano pełne różnice 3D oraz prostsze przesunięcia przód–tył, policzek–język i góra–dół. Na koniec chirurg ocenił, jak ergonomicznie odczuwał użycie każdej metody podczas zabiegu.
Co pokazały liczby
Główne ustalenie było takie, że obie metody były podobnie dokładne. Średnio implanty umieszczone za pomocą dynamicznego systemu kamer różniły się od planu o około 5 stopni w kącie i w przybliżeniu 1,8–2,0 milimetra w pozycji. Szablony statyczne dały niemal identyczne wyniki, z odchyleniami mieszczącymi się w powszechnie akceptowanych marginesach bezpieczeństwa wokół istotnych struktur anatomicznych. Testy statystyczne nie wykazały istotnej różnicy między obiema technikami dla żadnej z mierzonch odległości czy kątów. Oceny ergonomiczne chirurga były również zbliżone, co sugeruje, że zminiaturyzowany system kamerowy był równie praktyczny w użyciu jak ugruntowane podejście oparte na szablonach.
Co to oznacza dla pacjentów i stomatologów
Dla pacjentów przesłanie jest uspokajające: zarówno metoda prowadzona kamerą, jak i metoda ze szablonem mogą niezawodnie przenieść starannie zaplanowaną pozycję implantu do jamy ustnej z niewielkimi, klinicznie akceptowalnymi błędami. Nowszy system dynamiczny wydaje się bezpieczną alternatywą, która dodaje elastyczność umożliwiającą dopracowanie trajektorii wiertła podczas zabiegu, co może być szczególnie pomocne w ciasnych lub trudnych przestrzeniach. Wybór między tymi dwoma podejściami będzie prawdopodobnie zależał od indywidualnej anatomii, stopnia skomplikowania przypadku oraz preferencji i doświadczenia lekarza, a nie od dużych różnic w dokładności.
Cytowanie: Huth, K.C., Hrkal, J., Čičmanec, M. et al. Accuracy of dental implant positioning by dynamic or static computer-assisted implant surgery: a randomized controlled clinical trial. Sci Rep 16, 10997 (2026). https://doi.org/10.1038/s41598-026-45931-1
Słowa kluczowe: implanty zębowe, chirurgia prowadzona komputerowo, nawigacja dynamiczna, szablony chirurgiczne, dokładność implantów