Clear Sky Science · ja
ダイナミックまたは静的コンピュータ支援インプラント手術による歯科インプラント位置の精度:無作為化対照臨床試験
歯科インプラントを正しい位置に置くこと
歯科インプラントでは、金属製のスクリューをミリ単位の精度で配置する必要があります。神経や上顎洞、隣接する歯に近づきすぎると、数年後に問題が生じることがあります。現在、歯科医はドリルを正確な位置に導くためにコンピュータ誘導をますます利用しています。本研究は患者と臨床医の双方にとって実用的な疑問を投げかけます:新しいカメラ誘導システムは従来のプラスチック製ドリルガイドと同程度にインプラントを正確に配置できるのか?
歯科医の手を導く二つの方法
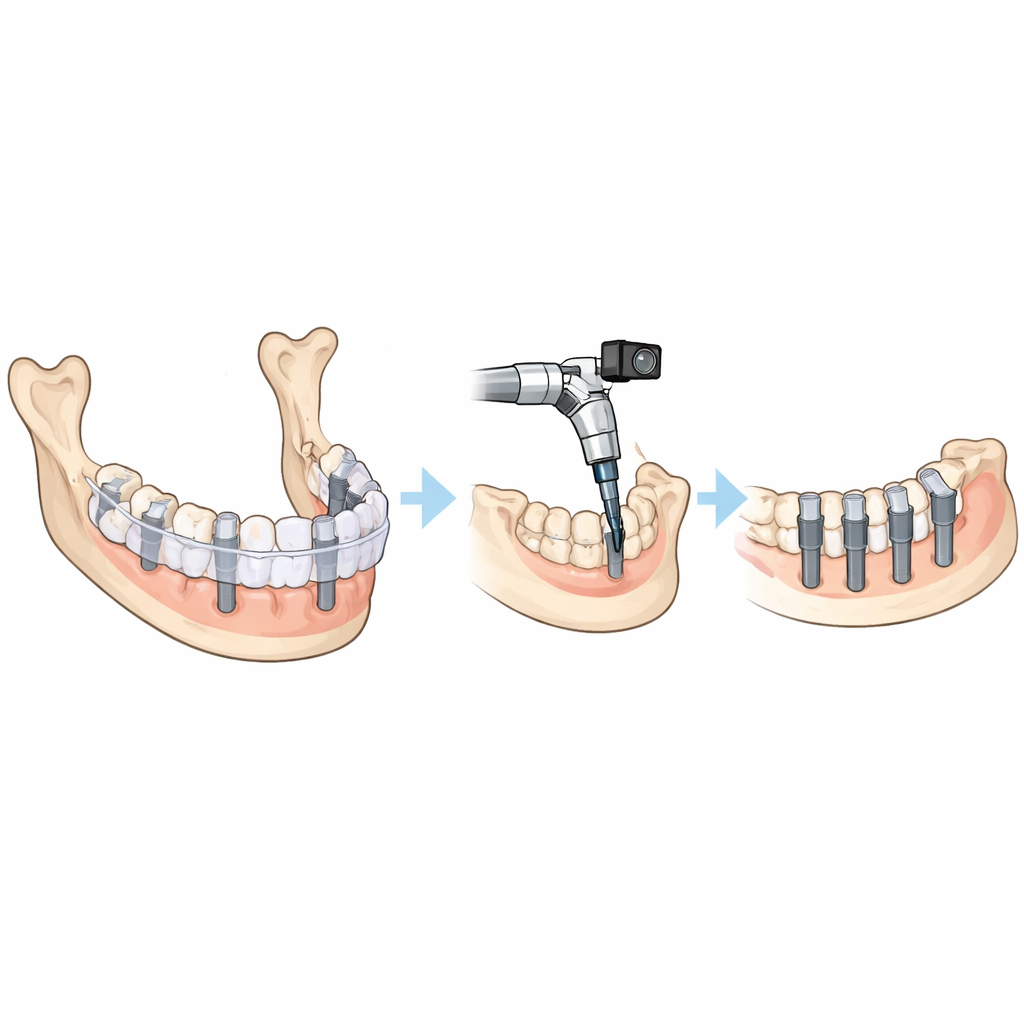
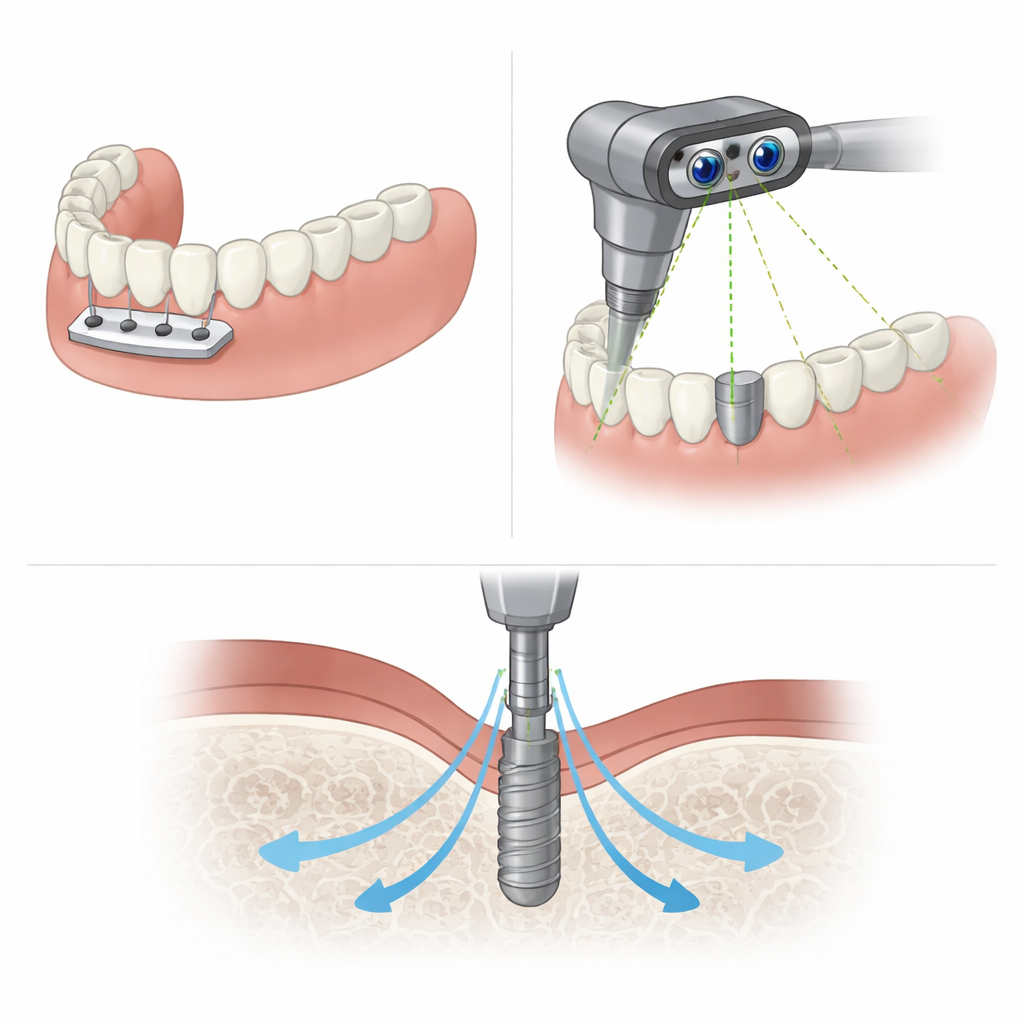
研究では、コンピュータ支援インプラント手術の主な2方式を比較しています。静的方式では、3Dスキャンから硬質プラスチック製のガイドが作られ、歯または歯肉に装着されます。ガイドにはドリルを固定経路に沿って誘導する金属製スリーブが入っています。一方、ダイナミック方式では、インプラントは同様に3Dスキャン上で計画されますが、口内にかさばるガイドはありません。代わりに小さな参照プレートを歯に取り付け、ドリルハンドピースに小型のステレオカメラを装着します。歯科医が作業する間、システムはドリルを患者の3Dスキャンに対してリアルタイムで追跡し、画面上に位置を表示して継続的な調整を可能にします。
試験の実施方法
著者らは、少なくとも1本のインプラントを必要とする45人の成人を対象に無作為化臨床試験を行い、合計70本のインプラントを評価しました。全患者がコーンビームCTスキャンを受け、インプラントは理想的な将来の歯の形状に沿ってプランニングソフト上で仮想的に配置されました。各被検者はランダムにカメラ誘導のダイナミックシステム(DENACAM)またはよく知られたメーカー製の静的ガイドのいずれかに割り当てられました。同じ経験豊富な外科医がすべてのインプラントを埋入し、両群でドリリングの手順は同一に保たれ、違いはドリルの誘導方法のみでした。
治癒後の微小な差を測定する
約3か月の治癒後、チームはインプラントがまっすぐに見えるかどうかを目視で判断しただけではありません。正確な印象採得を行い、石膏模型を作製して3Dでスキャンすることで、各インプラントの最終位置を正確に記録しました。次にこの結果を元の計画にデジタルで重ね合わせ、インプラントの基底部、先端、および角度が目標からどれだけ逸脱しているかを算出しました。3D全体の差に加え、前後、頬舌方向、上下方向の単純なずれも解析しました。最後に、外科医が手術中に各方法を使う際の使い勝手(エルゴノミクス)も評価しました。
数値が示したもの
主な所見は、両方式とも類似した精度であったということです。平均して、ダイナミックカメラシステムで配置されたインプラントは計画から角度で約5度、位置ではおおむね1.8〜2.0ミリメートルの差がありました。静的ガイドによる結果はほぼ同等で、重要な解剖学的構造の周囲の一般に受け入れられている安全マージン内に収まっていました。統計解析でも、測定された距離や角度のいずれについても両技術間に有意な差は見られませんでした。外科医のエルゴノミクス評価も同様であり、小型化されたカメラシステムが従来のテンプレートベースの手法と同程度に実用的であることを示唆しています。
患者と歯科医にとっての意味
患者にとっての結論は安心できるものです:カメラ誘導方式とガイドプレート方式のどちらも、慎重に計画されたインプラント位置を臨床的に許容される小さな誤差で口腔内に再現することができます。新しいダイナミックシステムは、手術中にドリル経路を微調整する柔軟性を加える安全な代替手段であり、特に狭小部位や扱いづらい部位で有用かもしれません。どちらのアプローチを選ぶかは、個々の解剖、症例の複雑さ、歯科医の好みや経験に依存することが多く、精度の大きな差によって決まるものではないでしょう。
引用: Huth, K.C., Hrkal, J., Čičmanec, M. et al. Accuracy of dental implant positioning by dynamic or static computer-assisted implant surgery: a randomized controlled clinical trial. Sci Rep 16, 10997 (2026). https://doi.org/10.1038/s41598-026-45931-1
キーワード: 歯科インプラント, コンピュータ誘導手術, ダイナミックナビゲーション, サージカルガイド, インプラントの精度