Clear Sky Science · ru
Точность позиционирования зубных имплантатов при динамической и статической компьютерной навигации: рандомизированное клиническое исследование
Установка зубных имплантатов в нужное место
Когда пациенту устанавливают зубной имплантат, металлический винт должен быть размещён с точностью до миллиметра. Если он окажется слишком близко к нерву, гайморовой пазухе или соседнему зубу, это может привести к проблемам через годы. Сегодня стоматологи всё чаще используют компьютерное сопровождение, чтобы просверлить отверстие точно в нужной точке. В этом исследовании поставлен практический вопрос, важный и для пациентов, и для клиницистов: обеспечивают ли новые системы с визуальным отслеживанием такую же точность имплантации, как традиционные пластиковые направляющие?
Два способа направлять руку стоматолога
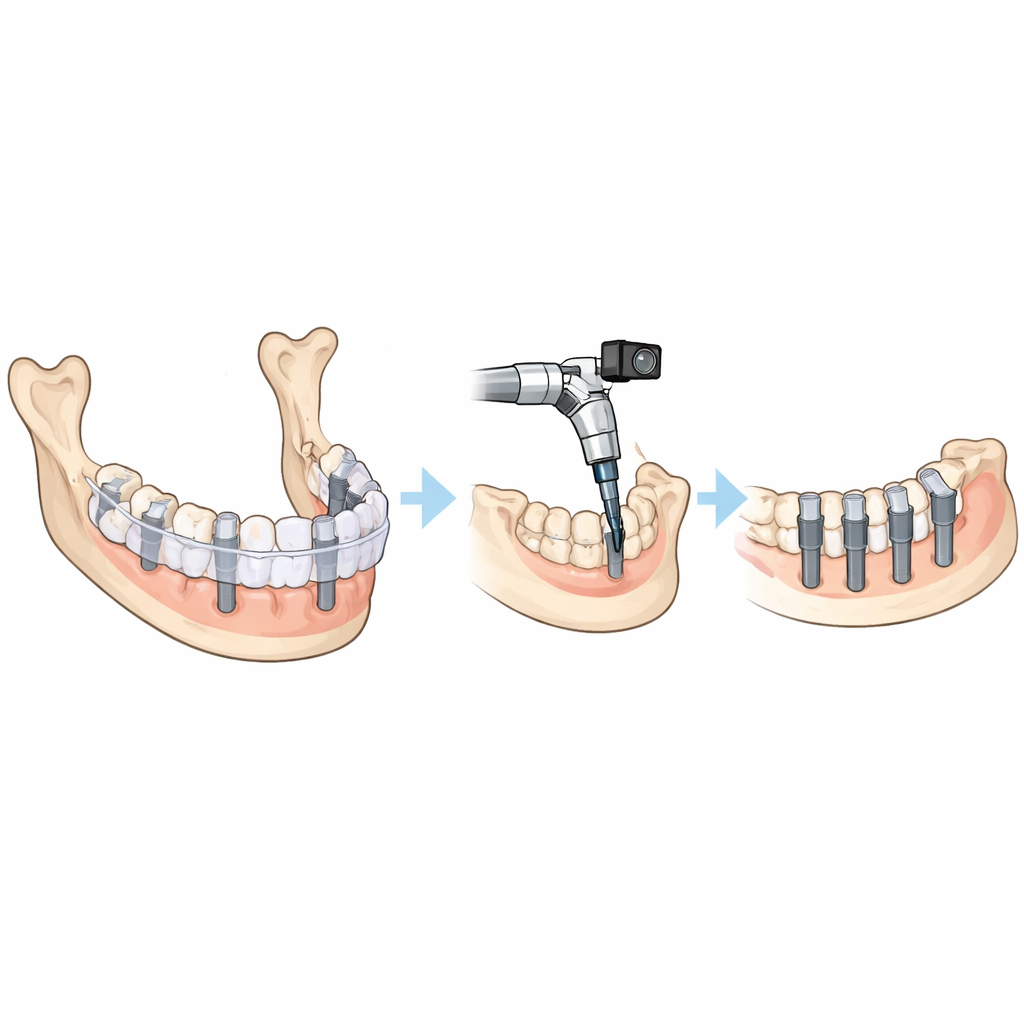
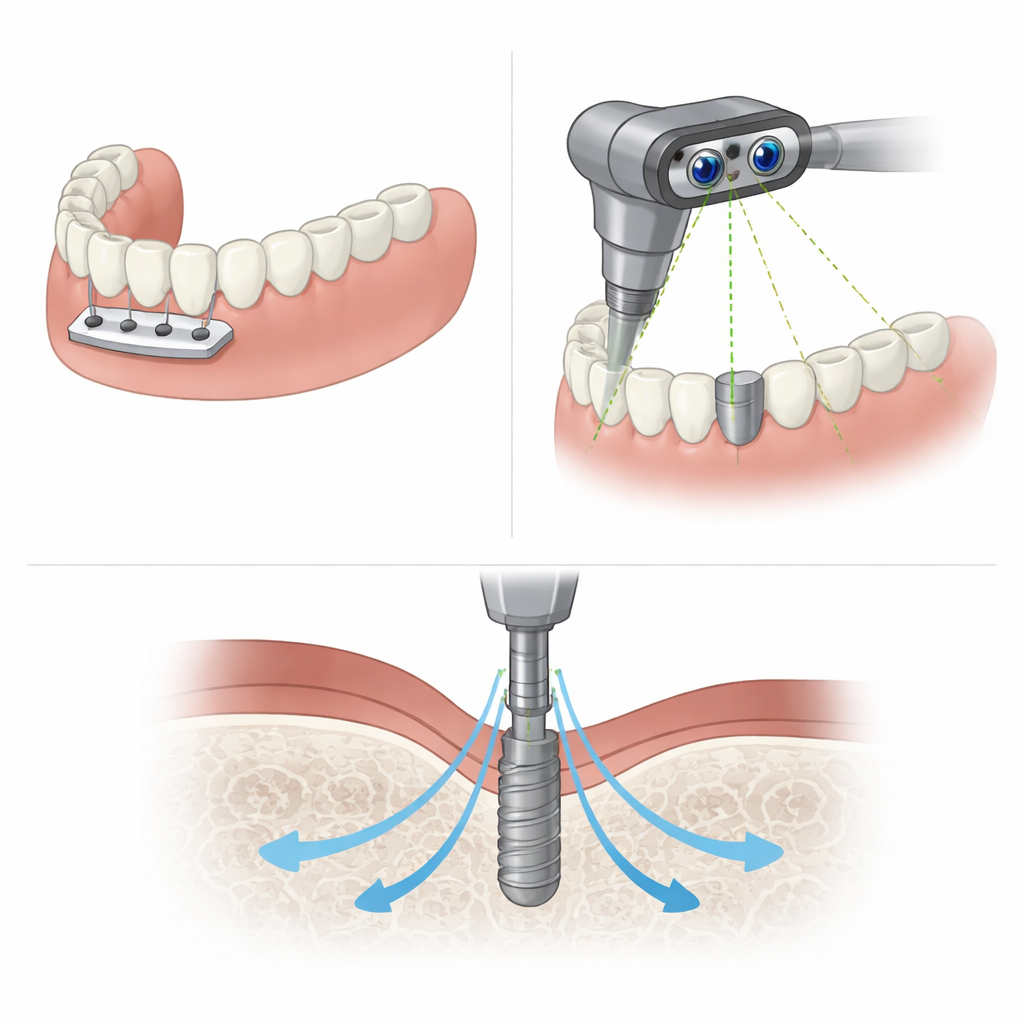
Исследование сравнивает два основных подхода к компьютерно‑ассистированной имплантологии. В статическом методе из 3D‑скана изготавливают жёсткую пластиковую направляющую, которая надевается на зубы или десну. В ней есть металлические втулки, направляющие сверло по фиксированному пути. В динамическом методе имплантат также планируют по 3D‑скану, но громоздкой направляющей во рту нет. Вместо этого к зубам крепят небольшую опорную пластину, а на ручке сверла устанавливают миниатюрную стереокамеру. По мере работы система в реальном времени отслеживает положение сверла относительно 3D‑скана пациента и отображает его на экране, что позволяет постоянно корректировать траекторию.
Как проводилось исследование
Авторы провели рандомизированное клиническое исследование с 45 взрослыми, которым требовался как минимум один имплантат, всего было установлено 70 имплантатов. Всем пациентам сделали конусно‑лучевую КТ, и имплантаты виртуально размещали в программном обеспечении в соответствии с идеальной формой будущего зуба. Каждого пациента случайным образом направляли либо в группу динамической системы с камерой (DENACAM), либо в группу со статическими направляющими от признанного производителя. Все имплантаты устанавливал один и тот же опытный хирург, соблюдая идентичную последовательность сверления в обеих группах; различие заключалось только в способе наведения сверла.
Измерение малых отклонений после заживления
Через примерно три месяца после заживления команда не ограничилась визуальной оценкой того, насколько ровно стоят имплантаты. Вместо этого фиксировали точное финальное положение каждого имплантата: снимали точную оттискную слепок, изготавливали гипсовую модель и сканировали её в 3D. Затем это цифровое изображение накладывали на первоначальный план и рассчитывали, насколько база, вершина и угол каждого имплантата отклонились от целевого положения. Анализировали полные 3D‑различия, а также более простые смещения перед‑назад, щёчно‑язычные и вертикальные. Наконец, хирург оценивал удобство использования каждого метода в ходе операции.
Что показали цифры
Главный вывод — оба метода оказались сопоставимо точными. В среднем имплантаты, установленные с помощью динамической системы с камерой, отличались от планируемого положения примерно на 5 градусов в угле и примерно на 1,8–2,0 мм в линейных координатах. Статические направляющие дали почти идентичные результаты, с отклонениями, находящимися в пределах обычно принятых безопасных зазоров вокруг важных анатомических структур. Статистические тесты не выявили существенной разницы между двумя методиками по любому из измеренных расстояний или углов. Эргономические оценки хирурга также были схожи, что указывает на то, что миниатюрная камера оказалась столь же практичной в применении, как и устоявшийся шаблон‑подобный подход.
Что это значит для пациентов и стоматологов
Для пациентов это обнадёживающая новость: и камера‑навигация, и метод с фиксированной направляющей способны надёжно перенести заранее спланированное положение имплантата в полость рта с небольшими, клинически приемлемыми погрешностями. Новая динамическая система представляется безопасной альтернативой, которая добавляет гибкость для точной подстройки траектории сверла во время операции — что может быть особенно полезно в узких или неудобных пространствах. Выбор между подходами, вероятно, будет зависеть от индивидуальной анатомии, сложности случая и предпочтений и опыта стоматолога, а не от существенных различий в точности.
Цитирование: Huth, K.C., Hrkal, J., Čičmanec, M. et al. Accuracy of dental implant positioning by dynamic or static computer-assisted implant surgery: a randomized controlled clinical trial. Sci Rep 16, 10997 (2026). https://doi.org/10.1038/s41598-026-45931-1
Ключевые слова: зубные имплантаты, компьютерно-направленная хирургия, динамическая навигация, хирургические шаблоны, точность имплантации