Clear Sky Science · sv
Fuzzy adaptiv icke-linjär MIMO-reglering för styvt kopplade multikroppsrobotar med hjälp av förstärkningsinlärningsmodell
Robotar som kan lära sig under arbetet
Robotar flyttar sig utanför inhägnade fabrikslinjer och in i sjukhus, lager och till och med våra hem. I dessa röriga miljöer förändras lasterna, golv är inte perfekt plana och människor kan stöta till dem. Denna artikel undersöker en ny metod för att ge flertledade robotar — som armar och gångmaskiner — förmågan att bibehålla jämna, precisa och stabila rörelser även när omgivningen är oförutsägbar och deras egen mekanik förändras över tid.
Varför traditionell robotstyrning inte räcker till
Klassiska robotregulatorer är lite som farthållare i en bil som förutsätter att vägen alltid är torr och plan. De förlitar sig på detaljerade matematiska modeller av varje led, växel och kraft. I verkligheten förändras en robots beteende när den plockar upp olika föremål, när lederna värms upp eller vid stötar och påfrestningar. För robotar med många leder och stark koppling mellan dem är det nästan omöjligt att skriva en perfekt modell. Som ett resultat slösar standard en-loop-regulatorer och även mer avancerade flerskiktslösningar ofta energi, reagerar långsamt eller tappar noggrannhet vid varierande laster och störningar.
Ett inlärande styrsystem för flertledade robotar
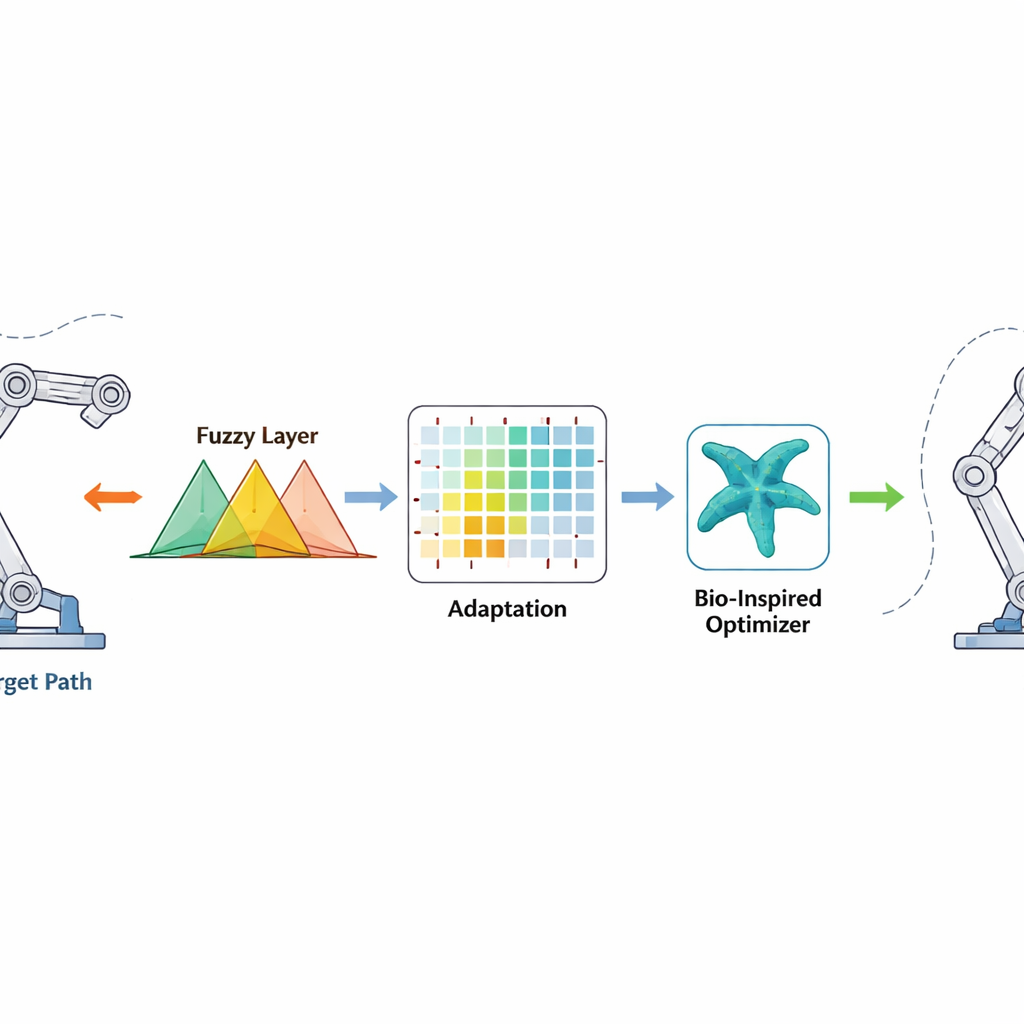
För att tackla detta föreslår författarna ett helt modellfritt styrningsramverk utformat för robotar med flera inbördes påverkande leder. Istället för att förlita sig på exakta ekvationer kombinerar regulatorn tre idéer: fuzzylogik, som mjukt översätter vaga begrepp som ”lite för långt” eller ”rör sig för snabbt” till styråtgärder; förstärkningsinlärning, som låter roboten förbättra sina beslut över tid genom försök och misstag; och en bioinspirerad sökmetod kallad sjöstjärneoptimeringsalgoritm, som hjälper till att välja bra startinställningar innan roboten ens rör sig. Utöver detta läggs en särskild "ändlig-tid"-term till så att följningsfelen inte bara krymper till slut, utan tvingas ner inom ett garanterat kort tidsfönster.
Hur den nya styrmetoden fungerar
Regulatorn observerar hur långt varje led är från sin önskade vinkel och hur snabbt det felet förändras. Dessa signaler leds genom fuzzyregler — uppsättningar av överlappande "om‑så"-uttalanden som kan hantera osäkerhet och icke-linearitet — för att producera ett mjukt vridmomentkommando till motorerna. Förstärkningsinlärning arbetar i bakgrunden och justerar fuzzyregelparametrarna online, belönar åtgärder som snabbt minskar felen och bestraffar de som orsakar översläng eller skakningar. Sjöstjärneoptimeraren agerar tidigare, i en offline‑fas, och söker efter en bra initial uppsättning fuzzyparametrar genom att efterlikna hur sjöstjärnor utforskar och finjusterar sin position i havet. Denna goda startpunkt snabbar upp inlärningen när roboten slås på, medan ändlig‑tid‑korrigeringen lägger till ett kraftigt, icke-linjärt tryck som driver felen nära noll inom en begränsad tid, även när robotens massa eller omgivning förändras oväntat.
Test på simulerade armar och ben
För att pröva idén använde forskarna datormodeller av två robotar. Den första är ett enkelt tvåledat system som ofta används för att efterlikna ett gångben, där en led medvetet lämnas utan direkt motorstyrning för att representera en underaktuerad, svårare att styra situation. Den andra är en femledad arm lik en lätt humanoid lem. I båda fallen var de önskade led-rörelserna mjuka, vågformiga banor, samtidigt som robotens länkmassor slumpmässigt varierades över tid med en statistisk process som imiterar realistiska, långsamt föränderliga laster. Extra störningar, såsom slumpmässiga knuffar och vridmomentbegränsningar, lades också till för att pröva regulatorn.
Vad simuleringarna visar
Över många försök bibehöll den nya regulatorn att ledernas rörelser noggrant följde sina önskade banor, med slutliga vinkel‑fel vanligtvis inom cirka 0,02 till 0,04 radian — bara några millimeter i armens ändpunkt. Jämfört med standard proportional–integral–derivative (PID)-styrning och mer avancerade adaptiva metoder minskade den föreslagna metoden det totala följningsfelet med upp till cirka 60 procent för tvåledssystemet och runt 30–35 procent för femledsarmen. Den nådde också smidigare rörelser snabbare, ofta på under etthalvt sekund, och använde ungefär 15 procent mindre styrinsats, vilket innebär lägre energiförbrukning och minskat slitage på motorerna. Även under extrema tester — såsom att dubbla den effektiva massan samtidigt som tillgängligt vridmoment begränsades — bibehöll regulatorn stabil rörelse och undvek våldsamma svängningar.
Vad detta betyder för vardagsrobotik
För icke‑specialister är huvudbudskapet att robotar inte behöver känna till varje detalj i sin egen mekanik för att röra sig pålitligt i en föränderlig värld. Genom att kombinera människoliknande "fuzzy"‑resonemang, försök‑och‑misstag‑inlärning och ett smart förinställningssteg inspirerat av sjöstjärnor, låter detta styrschema flertledade robotar anpassa sig i farten till skiftande laster och störningar samtidigt som det garanterar att felen krymper snabbt. Om metoden bekräftas på verklig hårdvara kan sådana tillvägagångssätt göra servicerobotar, hjälpmedel och smidiga industribrar både säkrare och mer effektiva, även när de ombeds hantera nya uppgifter, nya verktyg och nya miljöer utan omfattande ominstallation.
Citering: Duan, C., Wang, L. & Li, S. Fuzzy adaptive nonlinear MIMO control for rigid coupled multibody robots using reinforcement learning model. Sci Rep 16, 11458 (2026). https://doi.org/10.1038/s41598-026-40982-w
Nyckelord: robotstyrning, förstärkningsinlärning, fuzzylogik, adaptiv robotik, banföljning