Clear Sky Science · de
Fuzzy-adaptive nichtlineare MIMO-Regelung für steife gekoppelte Mehrkörpersystem-Roboter unter Verwendung eines Verstärkungslernmodells
Roboter, die während der Arbeit dazulernen
Roboter dringen aus abgegrenzten Fabrikbereichen heraus in Krankenhäuser, Lagerhäuser und sogar in unsere Wohnungen vor. In diesen unordentlichen Umgebungen ändern sich ihre Lasten, Böden sind nicht perfekt eben und Menschen können gegen sie stoßen. Diese Arbeit untersucht einen neuen Ansatz, um mehrgelenkigen Robotern – etwa Roboterarmen und Laufmaschinen – die Fähigkeit zu geben, ihre Bewegungen glatt, präzise und stabil zu halten, selbst wenn ihre Umgebung unvorhersehbar ist und sich ihr eigener Körper im Laufe der Zeit verändert.
Warum traditionelle Regelung an ihre Grenzen stößt
Klassische Roboterregler gleichen dem Tempomat eines Autos, der davon ausgeht, dass die Straße immer trocken und eben ist. Sie beruhen auf detaillierten mathematischen Modellen jedes Gelenks, jeder Verzahnung und jeder Kraft. In der Praxis driftet das Verhalten eines Roboters, wenn er unterschiedliche Gegenstände aufnimmt, seine Gelenke warm werden oder er Stöße und Schub erfährt. Bei Robotern mit vielen Gelenken und starker Kopplung ist es nahezu unmöglich, ein perfektes Modell zu erstellen. Daher verschwenden Standard-Einloop-Regler und selbst fortgeschrittene Mehrschleifen-Schemata oft Energie, reagieren langsam oder verlieren an Genauigkeit, wenn sich Lasten und Störungen ändern.
Eine lernende Steuereinheit für vielgelenkige Roboter
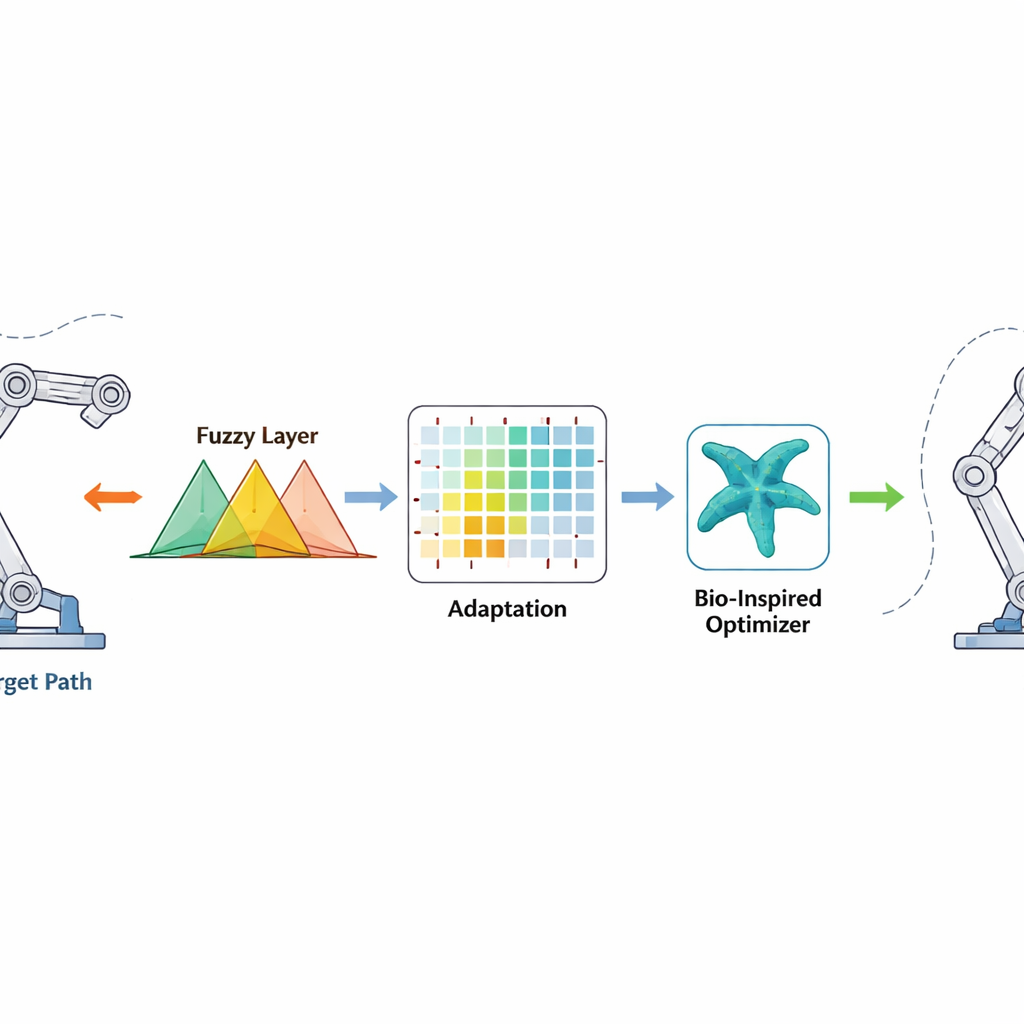
Um dem zu begegnen, schlagen die Autoren ein vollständig modellfreies Regelungsframework für Roboter mit mehreren wechselseitig beeinflussten Gelenken vor. Statt sich auf exakte Gleichungen zu stützen, kombiniert der Regler drei Ideen: Fuzzy-Logik, die vage Begriffe wie „etwas zu weit“ oder „zu schnell“ glatt in Regelaktionen übersetzt; Verstärkungslernen, das dem Roboter erlaubt, seine Entscheidungen durch Versuch und Irrtum im Laufe der Zeit zu verbessern; und ein bio-inspirierter Suchalgorithmus, der Starfish-Optimierungsalgorithmus, der dabei hilft, gute Anfangseinstellungen zu wählen, bevor sich der Roboter bewegt. Darüber hinaus wird ein spezieller „endlich-zeitlicher“ Term hinzugefügt, sodass Verfolgungsfehler nicht nur irgendwann abklingen, sondern innerhalb eines garantierten kurzen Zeitfensters stark reduziert werden.
Wie die neue Regelungsmethode arbeitet
Der Regler betrachtet, wie weit jedes Gelenk von seinem gewünschten Winkel entfernt ist und wie schnell sich dieser Fehler ändert. Diese Signale werden durch Fuzzy-Regeln geleitet – überlappende Wenn-Dann-Aussagen, die Unsicherheit und Nichtlinearität handhaben können – um ein sanftes Drehmomentkommando für die Motoren zu erzeugen. Verstärkungslernen wirkt im Hintergrund und passt die Parameter der Fuzzy-Regeln online an, belohnt Aktionen, die Fehler schnell reduzieren, und bestraft solche, die Überschwingen oder Zittern verursachen. Der Starfish-Optimierer wirkt früher, in einer Offline-Phase, und sucht nach einem guten initialen Satz Fuzzy-Parameter, indem er das Entdeckungs- und Verfeinerungsverhalten von Seesternen im Ozean nachahmt. Dieser gute Startpunkt beschleunigt das Lernen, sobald der Roboter eingeschaltet ist, während der endlich-zeitliche Korrekturterm einen starken, nichtlinearen Impuls hinzufügt, der Fehler innerhalb einer beschränkten Zeit nahe Null treibt, selbst wenn sich Masse oder Umgebung des Roboters unerwartet ändern.
Test an simulierten Armen und Beinen
Zur Erprobung nutzten die Forschenden Computermodelle von zwei Robotern. Der erste ist ein einfaches Zwei-Gelenk-System, das häufig als Modell eines Laufbeins dient, wobei ein Gelenk absichtlich ohne direkten Motoreingriff gelassen wird, um eine unteraktuerte, schwerer zu regelnde Situation darzustellen. Der zweite ist ein fünfgelenkiger Arm, ähnlich einem leichten humanoiden Gliedmaß. In beiden Fällen waren die geforderten Gelenkbewegungen glatt und wellenförmig, während die Massen der Verbindungen über die Zeit zufällig variiert wurden mithilfe eines statistischen Prozesses, der realistische, langsam veränderliche Nutzlasten nachbildet. Zusätzliche Störungen, wie zufällige Schubkräfte und Drehmomentbegrenzungen, wurden ebenfalls hinzugefügt, um den Regler zu belasten.
Was die Simulationen zeigen
Über viele Durchläufe hielt der neue Regler die Gelenke der Roboter nahe an ihren gewünschten Bahnen, mit Endwinkelabweichungen typischerweise im Bereich von etwa 0,02 bis 0,04 Radiant – nur wenige Millimeter am Ende eines Arms. Im Vergleich zu standardmäßiger PID-Regelung und fortgeschritteneren adaptiven Methoden reduzierte der vorgeschlagene Ansatz den Gesamtnachführfehler um bis zu etwa 60 Prozent beim Zwei-Gelenk-System und um rund 30–35 Prozent beim Fünf-Gelenk-Arm. Er stellte außerdem schneller in geschmeidige Bewegung um, häufig in unter anderthalb Sekunden, und benötigte etwa 15 Prozent weniger Regelaufwand, was geringeren Energieverbrauch und reduzierten Verschleiß an den Motoren bedeutet. Selbst unter extremen Prüfungen – wie der Verdopplung der effektiven Masse bei gleichzeitiger Begrenzung des verfügbaren Drehmoments – hielt der Regler stabile Bewegungen aufrecht und vermied heftige Ausschläge.
Was das für die Alltagsrobotik bedeutet
Für Nicht-Fachleute ist die Kernbotschaft: Roboter müssen nicht jedes Detail ihrer eigenen Mechanik kennen, um in einer sich verändernden Welt zuverlässig zu agieren. Durch die Kombination von menschenähnlichem „fuzzy“ Denken, Trial-and-Error-Lernen und einem cleveren Vorab-Tuning-Schritt, inspiriert von Seesternen, ermöglicht dieses Reglerschema Mehrgelenksrobotern, sich im laufenden Betrieb an wechselnde Lasten und Störungen anzupassen und dennoch sicherzustellen, dass Fehler schnell abnehmen. Wenn sich dies an realer Hardware bestätigt, könnten solche Methoden Serviceroboter, Assistenzgeräte und bewegliche Industrieroboter sowohl sicherer als auch effizienter machen, selbst wenn sie neue Aufgaben, Werkzeuge und Umgebungen ohne umfangreiche Umprogrammierung bewältigen sollen.
Zitation: Duan, C., Wang, L. & Li, S. Fuzzy adaptive nonlinear MIMO control for rigid coupled multibody robots using reinforcement learning model. Sci Rep 16, 11458 (2026). https://doi.org/10.1038/s41598-026-40982-w
Schlüsselwörter: Robotersteuerung, Verstärkungslernen, Fuzzy-Logik, adaptive Robotik, Trajektorienverfolgung