Clear Sky Science · ja
人間ロボット相互作用における新しいマルチモジュールニューラルネットワーク戦略による人間感情の認識
感情を読み取るロボットを教える
ロボットが家庭や病院、教室に入ってくると、単に指示に従うだけでは不十分になります。本当に役立つ存在になるには、人の感情を察知して行動を適応させる必要があります—不安な患者を慰めたり、動揺した運転者を落ち着かせたり、内気な生徒を励ましたりするように。本論文は、照明や背景の混雑、部分的な遮蔽などが機械を混乱させがちな現実世界の雑多な状況でも、顔の表情から人間の感情を迅速かつ正確に読み取るための新しい方法を提示します。

感情に敏感なロボットが重要な理由
人間とロボットの相互作用は、音声コマンドや正確な動作だけに依存するわけではありません。人は自然に顔を通じて感情を示し、社会的知能を備えた機械にはそれを察知して適切に反応することが期待されます。既存の感情認識システムは、顔が中央にあり十分に照らされ、はっきり見えるような制御された実験室条件ではうまく機能することが多いです。しかし日常生活では、顔が向きを変えていたり部分的に隠れていたり、照明が不十分であったりし、恐怖や嫌悪のような一部の感情は訓練画像にほとんど現れないこともあります。著者らは、セキュリティスクリーニング、医療支援、運転者監視、個別化教育といった現場での実運用に耐えうる堅牢な感情認識システムを設計することで、このギャップを埋めることを目指しています。
複数の脳に着想を得たネットワークの融合
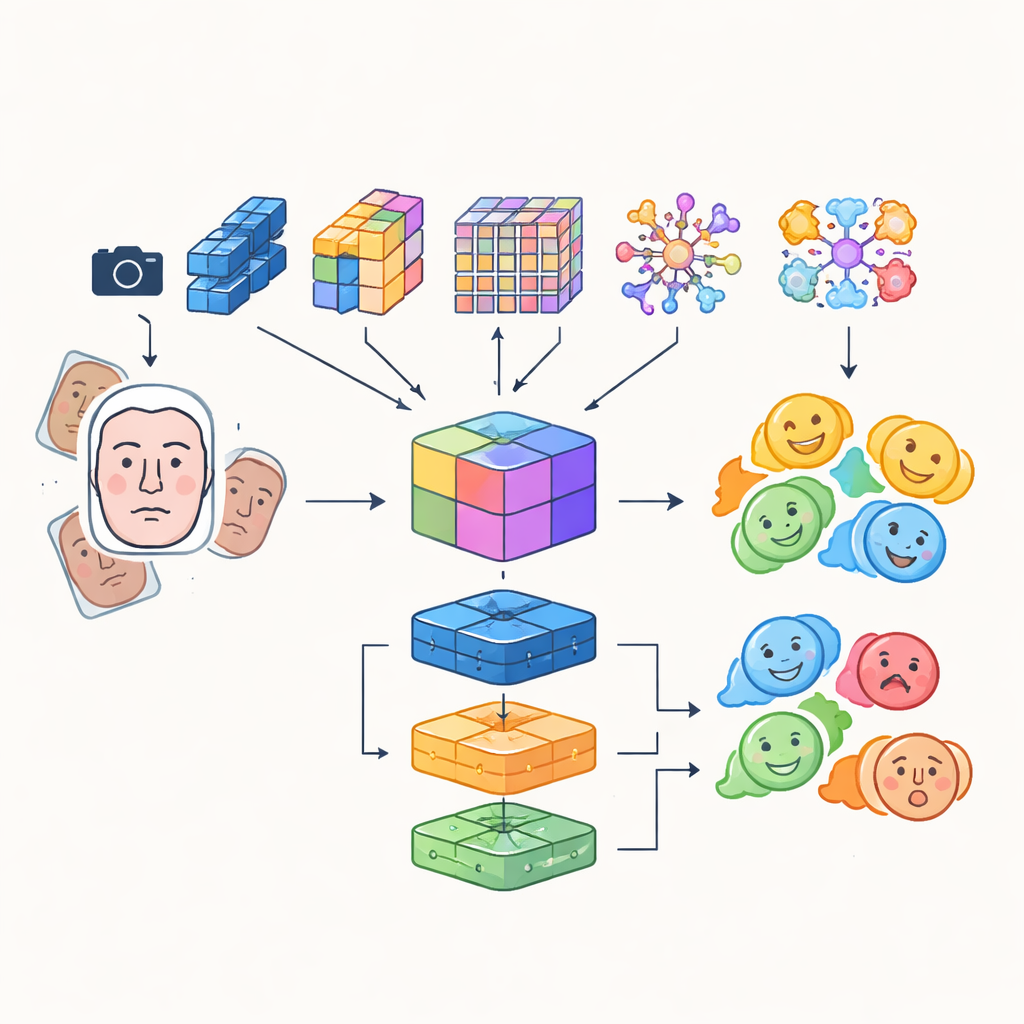
単一の人工ニューラルネットワークに依存するのではなく、研究者らは複数の先進的な画像解析モデルの強みを組み合わせた「マルチモジュール」システムを構築します。4種類の畳み込みネットワークおよびトランスフォーマーベースのネットワークが、それぞれ異なる方法で入力される顔画像を解析します:あるものはリアルタイム処理のための効率性に重点を置き、別のものは細部や顔領域間の長距離関係を捉えるのに優れ、さらに別のものは目や口など重要な領域を強調します。それらの出力は、微妙なテクスチャと表情の全体的なパターンの両方を捉える豊かな共有表現へと融合されます。この融合表現は、その後畳み込みネットワーク、時間的変化を追跡できる再帰ユニット、伝統的な多層パーセプトロンを含む複数の分類器群に入力され、これらの総合的な投票によって最終的な感情ラベルが決定されます。
より鋭い視点と賢い学習データ
ロボットが適切な瞬間に正しい顔に注目するようにするため、システムは検出トランスフォーマーを統合しています。これは、画像を多くの重なったボックスで走査するのではなく、顔の検出を直接予測するタスクとして扱う最新の物体検出手法です。このコンポーネントは混雑した場面でも顔を確実に特定することを学習し、感情モジュールに対してきれいで適切にフレーム化された顔領域を渡します。著者らはまた、自動で学習された特徴と、エッジや局所的なテクスチャに注目する従来の手作り記述子を組み合わせ、照明変化や部分的な遮蔽に対してより耐性のあるハイブリッドな特徴セットを作成します。感情カテゴリの自然な不均衡—微笑みの顔は多いが恐怖の顔は少ないといった—を補うために、回転、反転、色やコントラストの変化を用いた大幅なデータ拡張を行い、代表性の低い表情の新しく多様な例を効果的に生成します。
現実的で難しい顔での評価
チームは、AffectNet と CK+ という広く使われる2つの顔表情データベースに加えて、研究室で録画した新しいカスタムデータセットでアプローチを評価します。このカスタムデータセットは、厳しい照明、複雑で変化する背景、多様な文化的背景の被写体を意図的に含めており、ロボットが現場で遭遇する状況をよりよく模倣しています。3つのデータセット全体で、マルチモジュールシステムは高い精度を達成し、公開データ集合では90%を超え、入念に作成した実験室データでは約98%に達しました。データ拡張は一貫して性能を向上させ、特に恐怖や嫌悪のような困難な感情に対して効果的であり、統合されたアンサンブルは従来の手作りパイプラインや最新の単一ネットワークのベースラインを上回りました。重要なのは、効率的なモデルファミリを中心に設計することで、リアルタイム応答に十分な処理速度を維持している点です。
より感度の高い機械的パートナーの構築
実用的に言えば、この研究はロボットが単に顔を見つけるだけでなく、日常使用に耐えうる信頼性でその感情内容を読み取る多層のビジョンシステムを装備できることを示しています。複数の専門化されたネットワークを積み重ね、最新の顔検出モジュールを加え、訓練データを注意深く拡張・均衡化することで、このシステムは困難な視覚条件下でも幅広い基本的な感情を理解できます。専門外の方への要点は明快です:この種のアーキテクチャにより、将来のロボットや対話型デバイスは、誰かが幸せか、動揺しているか、不安か、無関心かをより的確に感知し、それに応じて行動を調整できるようになり、機械とのやり取りがより自然で支援的、人間らしく感じられるようになるということです。
引用: Zaman, K., Islam, A.U., Zengkang, G. et al. A novel multi-module neural networks strategy of human emotion recognition in the human-robot interaction. Sci Rep 16, 11433 (2026). https://doi.org/10.1038/s41598-026-40798-8
キーワード: 人間ロボット相互作用, 感情認識, 顔表情, ディープラーニング, トランスフォーマーベースのビジョン