Clear Sky Science · ar
SLAM بصري-قصوري معزَّز باستخدام SuperPoint وكشف السمات الديناميكية الهندسية الدلالية
ملاحة أذكى في عالم متحرك
تحتاج الروبوتات والطائرات بدون طيار وسماعات الواقع المعزز إلى معرفة موضعها بدقة بينما العالم حولها في حركة مستمرة. يمكن لأنظمة الخرائط التقليدية أن تتشوّش بسبب المشاة المارين أو السيارات المارة، مما قد يؤدي إلى انحراف السهام الرقمية عن الطريق أو تقدير خاطئ لمسار الروبوت. تقدم هذه الدراسة SuperDynaSLAM، طريقة للملاحة مصممة للحفاظ على تتبع الموضع بشكل أكثر موثوقية في مشاهد مزدحمة ومتغيرة، باستخدام أدوات الذكاء الاصطناعي الحديثة وحساسات الحركة.
رؤية وإحساس الحركة معًا
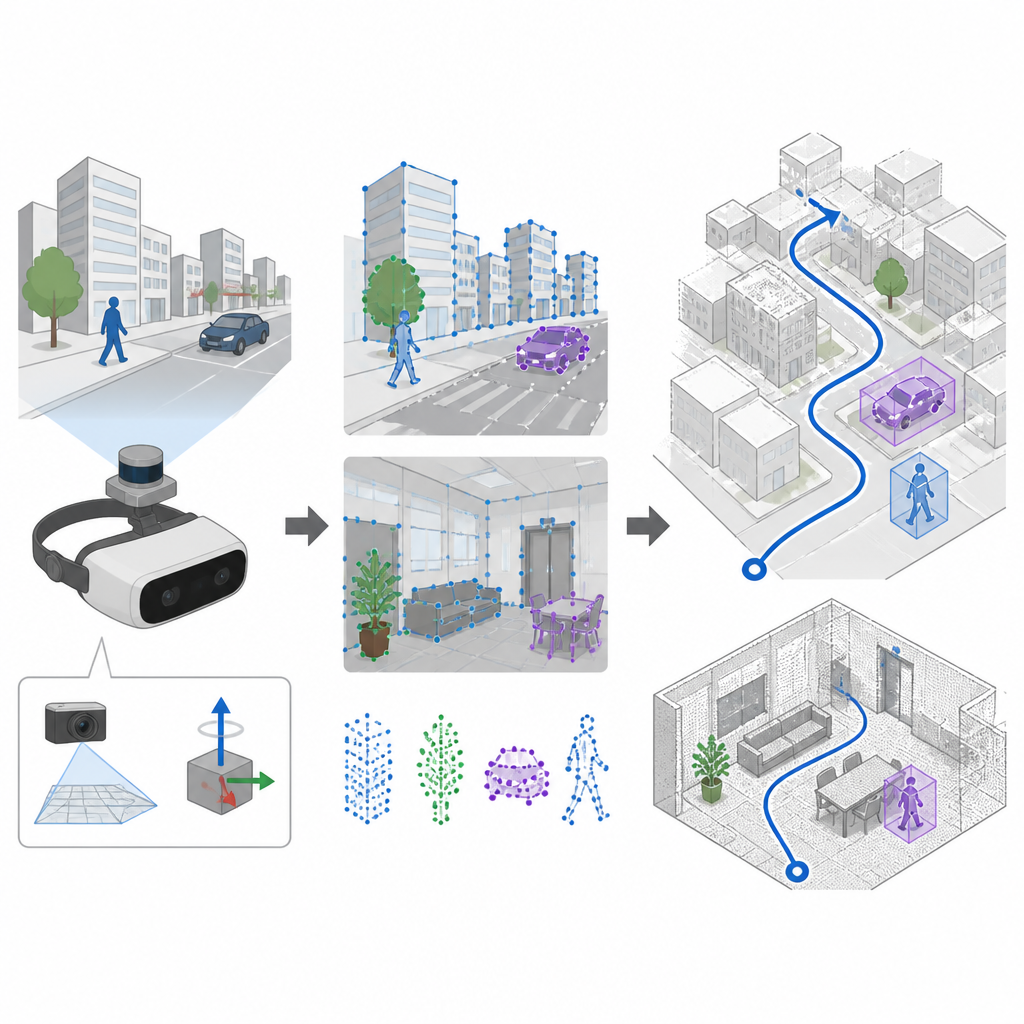
تعتمد العديد من أنظمة الملاحة على الكاميرات وتقنية تسمى SLAM لبناء خريطة ومتابعة المسار في الوقت نفسه. تختار الأنظمة القديمة نقاطًا مميزة في الصورة بقواعد مصممة يدويًا، والتي تعمل جيدًا في المشاهد الهادئة والإضاءة الجيدة لكنها تفشل غالبًا عند اهتزاز الكاميرا أو تغير الإضاءة بسرعة. يحسّن SuperDynaSLAM هذه الطبقة الأمامية باستخدام كاشف سمات مُتعلم يُدعى SuperPoint، والذي تدرب على العديد من مشاهد الحياة الحقيقية حتى يتعرف على نقاط مرجعية بصرية موثوقة حتى عند تحرك الكاميرا بعنف أو تغير زاوية الرؤية بصورة كبيرة. كما يستخدم النظام وحدة حساسات حركة مدمجة تقيس دوران الجهاز وتسارعه بين إطارات الكاميرا.
فصل الخلفية عن الأشياء المتحركة
تتمثل إحدى التحديات الكبرى لأي نظام ملاحة بصري في أن ليس كل ما يقع ضمن مجال الرؤية ثابتًا في مكانه. الأشخاص والسيارات والأشياء المتحركة الأخرى تخلق إشارات بصرية مضللة. يتعامل SuperDynaSLAM مع هذا عبر عمليتين متتابعتين. أولاً، يطبّق برنامج تعلم عميق يُدعى Mask R-CNN على كل صورة لرسم حدود تقريبية حول الأشياء القابلة للحركة مثل المركبات والمشاة. تُجمّع نقاط الميزة التي يكتشفها SuperPoint بعد ذلك إلى ثلاثة أنواع بسيطة حسب موضعها: خلفية، مركبات، ومشاة. يُسمَح بمطابقة النقاط فقط داخل نفس النوع، مما يقلّل بالفعل من الأخطاء الواضحة، مثل مطابقة زاوية مبنى بسيارة مارة.
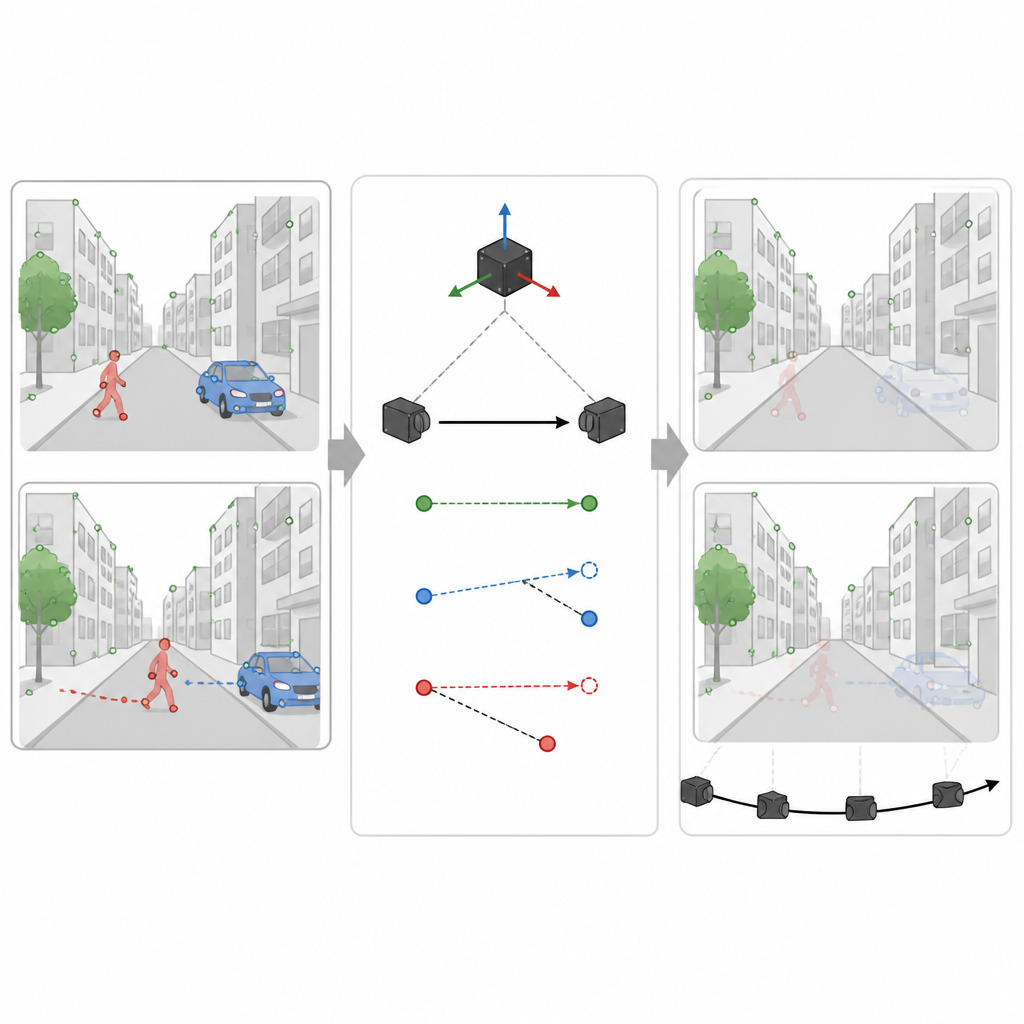
استخدام إشارات الحركة لاكتشاف ما يتحرك فعلاً
لكن ليس كل منطقة على شكل سيارة أو شخص تكون متحركة في لحظة معينة. يجب أن تساعد سيارة متوقفة الخريطة بدلًا من الإضرار بها. في المرحلة الثانية، يستخدم SuperDynaSLAM قراءات حساسات الحركة لحساب كيفية إزاحة نقطة ثابتة فعليًا في المشهد بين صورتين للكاميرا. يقارن هذا الإزاحة المتوقعة بما تراه الكاميرا فعليًا لعدد من النقاط العينية على كل جسم محتمل الحركة. إذا انحرفت نقاط الجسم بعيدًا جدًا عن المسار المتوقع، يستنتج النظام أن الجسم يتحرك ويعلّم جميع نقاطه على أنها غير موثوقة. وإذا بقيت قريبة، يُعامل الجسم كجزء من المشهد المستقر. تتيح هذه الفلترة الانتقائية للنظام التخلص من المعلومات المضللة مع الاحتفاظ بأكبر قدر ممكن من التفاصيل المفيدة.
مختبر في شوارع افتراضية ومكاتب وأسواق
اختبر الباحثون SuperDynaSLAM على ثلاث مجموعات بيانات مت demanding. جاء أحد المجموعات من رحلات داخلية حقيقية مع حركة سريعة وتغيرات ضوئية. كانت مجموعة أخرى مدينة ومحطة وقوف سيارات محاكية حيث يمكن زيادة مستوى الحركة من شوارع خالية إلى تدفق كثيف. والثالثة كانت روبوتًا يتجوّل عبر مكاتب ومنازل وأسواق ومقاهي حقيقية مليئة بالمتسوقين المتحركين والفوضى. عبر معظم هذه التجارب، خاصة عند وجود العديد من الأشياء المتحركة أو حركات كاميرا حادة، تبع SuperDynaSLAM المسار الحقيقي بشكل أوثق وباضطراب أقل من الأنظمة الرائدة التي تعتمد على ميزات بصرية أقدم أو على نوع واحد فقط من الإشارات.
ماذا يعني هذا للملاحة اليومية
بالنسبة للقارئ العادي، الرسالة الأساسية هي أن SuperDynaSLAM يساعد الآلات على التركيز على ما هو صلب وموثوق في المشهد وتجاهل الحركة المشتتة. من خلال الجمع بين ميزات بصرية متعلمة، ووعي بالأشياء، واستشعار الحركة، يبني خرائط أدق ويتتبع موضعه بثبات أكبر، حتى في البيئات المزدحمة أو سريعة التغير. وعلى الرغم من أن ذلك يأتي بتكلفة حاسوبية أعلى وأن النظام قد يفوت أشياء متحركة غير اعتيادية، فإن النهج يمثل خطوة عملية نحو ملاحة أكثر موثوقية للسيارات الذاتية القيادة والروبوتات الموصلة وأجهزة الواقع الافتراضي أو المختلط الغامرة.
الاستشهاد: Cui, J., Huang, Y. & Wang, L. Enhanced visual-inertial SLAM Using SuperPoint and semantic geometric dynamic feature detection. Sci Rep 16, 15538 (2026). https://doi.org/10.1038/s41598-026-46629-0
الكلمات المفتاحية: SLAM بصري قصوري, بيئات ديناميكية, استخراج السمات, ملاحة الروبوت, رؤية حاسوبية