Clear Sky Science · zh
一种用于内腔介入的同心管导管,通过磁共振成像进行操控与成像
更温和的器械用于精细的心脏手术
将器械穿入体内深处的血管是现代医学的常规操作,应用于从疏通堵塞动脉到治疗心律失常等多种情形。然而,目前的导管相对较硬,通常使用X射线成像进行引导,这不仅使患者与临床人员暴露于辐射,还只能提供平面的阴影图像。本文提出了一种新型软性、可操控的导管,由磁共振成像(MRI)设备本身进行引导与驱动,指向在一些人体最脆弱通道内实现更安全、更精确的操作。
为何现有导管难以操控
传统导管通过体外推动与旋转来操作,依赖操作员的技巧以及预设形状的金属丝来到达目标血管。为便于控制而带来的刚性也可能损伤脆弱组织,并在手术中或术后导致并发症。更先进的“连续体”或“同心管”机器人由多根预弯曲的管套套叠组成,能够向多方向弯曲,但它们通常由非常刚性的合金制成。这种刚性会导致结构从一种形状突然跳变到另一种形状(瞬态翻转),这种行为难以预测,在体内很危险。同时,这类设备通常依赖X射线透视成像进行追踪,提供的三维信息有限并增加了辐射剂量。
让MRI扫描器一机多用
作者提出了一种称为同轴套磁驱动器(Coaxial Sleeve Magnetic Actuator,CoSMA)的装置,这是一种从头设计用于在MRI扫描仪内工作的三部件导管。CoSMA并不在导管内塞入永久磁体或电机,而是静静地利用每台MRI机器产生的强大、稳定的磁场。三个同心套筒尖端的小型软金属环和销钉会自然地尝试与该磁场对齐。通过在扫描仪外滑动和旋转这些套筒,操作员可以重塑尖端形状,利用MRI的磁场作为一种无形的能量源。由于套筒的材料更类似于编织尼龙而非弹性金属,整体结构比典型的同心管机器人柔软约一千倍,从而在触及血管壁时降低了损伤风险。
软性导管如何弯曲与回环
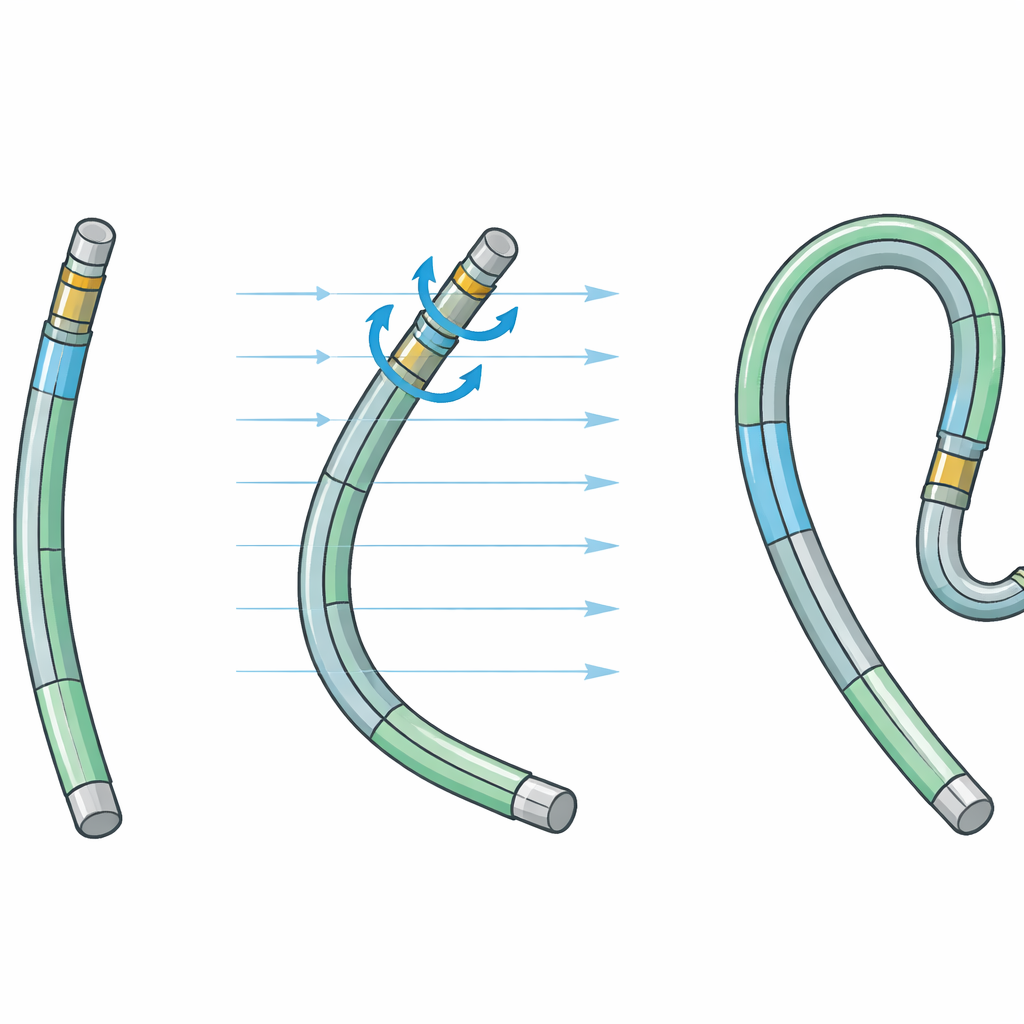
三层套筒协同工作以生成多种形状。最外层的套筒携带一组环,使其在MRI磁场作用下平滑弯曲,但不会超过大约直角。中间套筒带有另一组以不同角度放置的环;相对于外层旋转并伸出该套筒可以翻转弯曲方向,使导管向后卷曲或形成S形曲线。一根细内套筒,端部带有小金属销钉,可沿组合结构指向的任一方向延伸,有效地扫过完整圆周的可能朝向。研究者们建立了将磁力与编织管的弹性阻力平衡的计算模型,使他们能够预测并调谐这些形状,同时减少突发的瞬态翻转倾向。
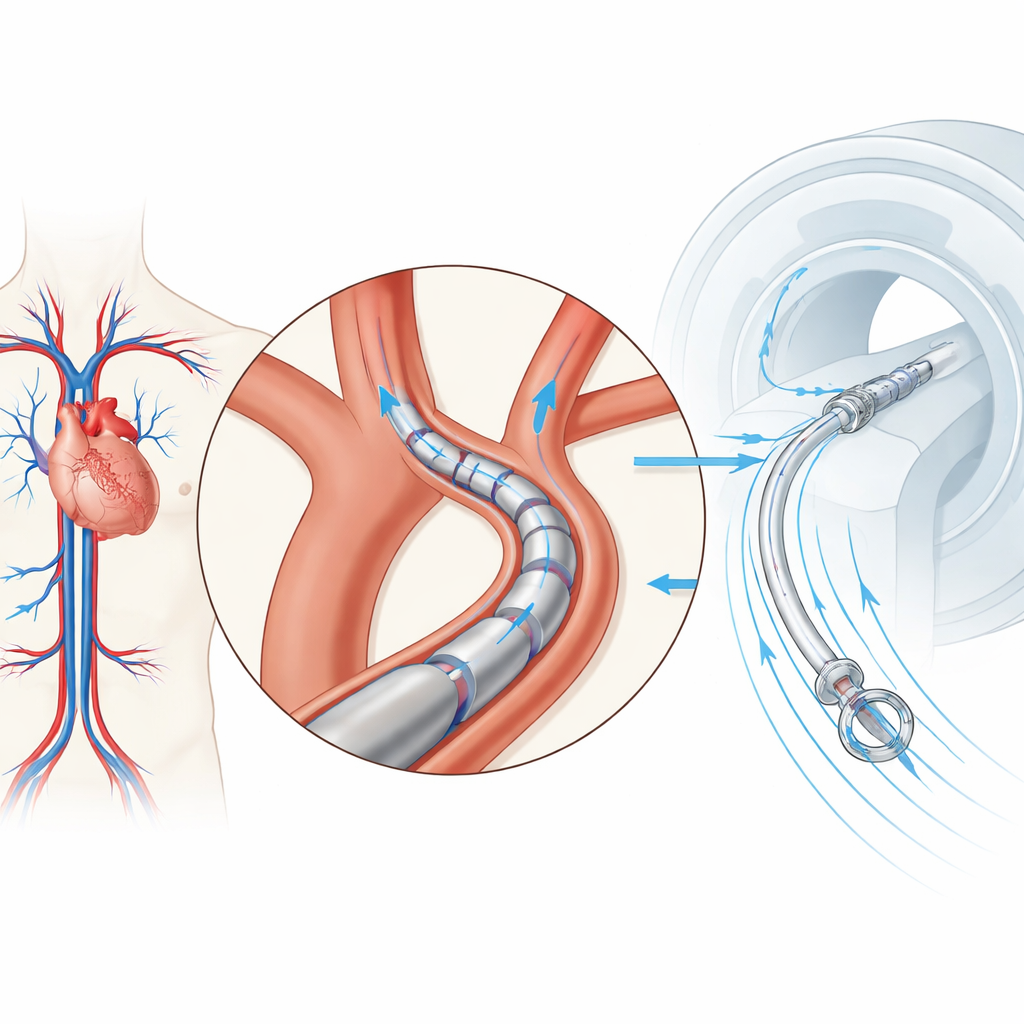
在人体主动脉模型内的测试
为证明这不是实验室里的玩具,团队将CoSMA引导通过了一个3D打印的塑料人主动脉弓模型——主动脉弓是从心脏出发的弯曲大动脉,很快分支为向头部与上肢供血的血管。操作员在MRI扫描仪外手动控制该装置,一名无经验的用户能够在十分钟内将导管从模拟腿部进入点引导至五个关键分支中的每一个。MRI提供了细致的三维图像,使研究者能够重建解剖结构与导管在导航过程中的精确形状,尽管少数微小金属部件对信号造成了不可避免的暗区。原型的4毫米外径已在临床器械的范围内,作者认为随着制造工艺的改进,进一步小型化是可行的。
走向更智能、更安全的导航步骤
在讨论中,作者强调CoSMA是新一类由MRI驱动且在MRI下可见的导管的概念验证。当前设备由人工控制,MRI图像离线处理,但相同的原理可以支持未来系统:这些系统自动解读快速MRI扫描、实时重建导管形状并相应调整套筒动作。他们概述了对更快成像、自动致动硬件和更高效控制软件的需求,以及对更紧凑和精细加工的磁性组件的要求。如果这些工程挑战被克服,该方法可实现软性、高机动性的导管,在辐射为空、三维引导下以最小受力通过复杂血管,为患者与临床人员提供一种更温和的到达体内困难部位的方式。
引用: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
关键词: 磁共振引导导管, 软体机器人, 血管内介入, 磁力驱动, 同心管机器人