Clear Sky Science · nl
Een concentrische buiskatheter voor endoluminale ingrepen, gestuurd en afgebeeld via magnetische resonantiebeeldvorming
Zachtere instrumenten voor gevoelige hartprocedures
Het dieper in de bloedvaten invoeren van instrumenten is een gebruikelijke handeling in de moderne geneeskunde, toegepast bij alles van het openen van verstopte slagaders tot het behandelen van hartritmestoornissen. De huidige katheters zijn echter relatief stijf en worden meestal onder röntgenbeeldvorming geleid, wat zowel patiënten als zorgverleners aan straling blootstelt en alleen vlakke, schaduwachtige beelden oplevert. Dit artikel presenteert een nieuw type zachte, stuurbare katheter die door een MRI-scanner zelf wordt geleid en aangedreven, en wijst op veiliger, nauwkeuriger ingrijpen in enkele van de meest kwetsbare doorgangen van het lichaam.
Waarom huidige katheters moeilijk te sturen zijn
Conventionele katheters worden vanaf buiten het lichaam geduwd en gedraaid, afhankelijk van de vaardigheid van de operator en voorgemodelleerde metalen draden om het juiste vat te bereiken. Hun stijfheid, nuttig voor controle, kan ook kwetsbaar weefsel beschadigen en soms complicaties veroorzaken tijdens of na de procedure. Geavanceerdere ‘continuum’- of ‘concentrische buis’-robots — opgebouwd uit meerdere vooraf gekromde buizen die in elkaar geschoven zijn — kunnen in vele richtingen buigen, maar ze zijn gemaakt van zeer stijve legeringen. Die stijfheid kan plotselinge overgangen van de ene naar de andere vorm veroorzaken, een snap-through-gedrag dat moeilijk te voorspellen en riskant is in het lichaam. Tegelijkertijd worden deze apparaten meestal gevolgd met röntgenfluoroscopie, die beperkte driedimensionale informatie geeft en extra stralingsbelasting toevoegt.
De MRI-scanner dubbel gebruiken
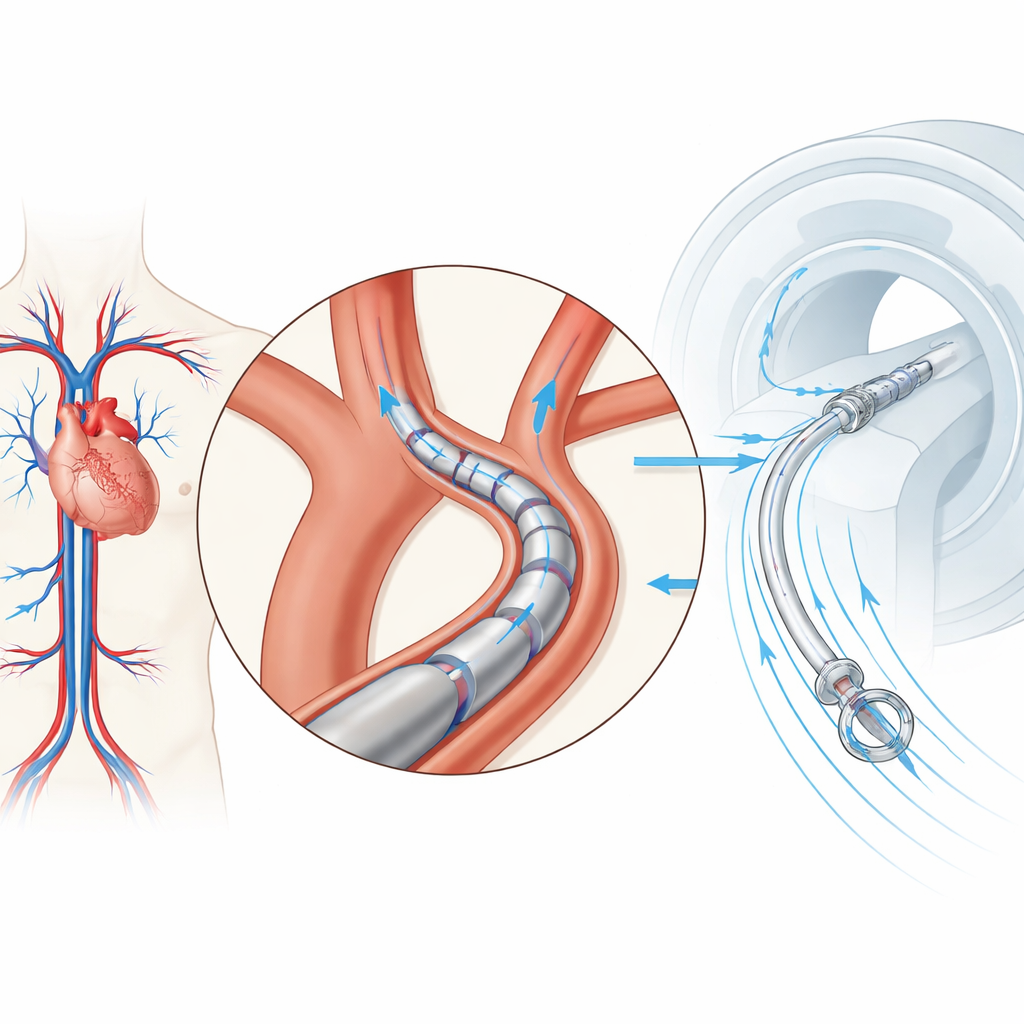
De auteurs introduceren een apparaat genaamd Coaxial Sleeve Magnetic Actuator (CoSMA), een drievoudige katheter die vanaf de basis is ontworpen om binnen een MRI-scanner te functioneren. In plaats van permanente magneten of motoren in de katheter te plaatsen, maakt CoSMA stilletjes gebruik van het krachtige, constante magnetische veld dat elke MRI-machine genereert. Kleine zachtmetalen ringen en pennen aan de punt van elk van de drie concentrische mouwen proberen zich vanzelf aan dit veld uit te lijnen. Door de mouwen van buiten de scanner te schuiven en te roteren, kan de operator de punt van vorm veranderen, waarbij het MRI-veld als onzichtbare energiebron fungeert. Omdat het materiaal van de mouwen meer lijkt op gevlochten nylon dan op veerachtig metaal, is de totale constructie ongeveer duizend keer zachter dan typische concentrische buisrobots, wat het risico op schade bij druk tegen de vaatwand verlaagt.
Hoe de zachte katheter buigt en krult
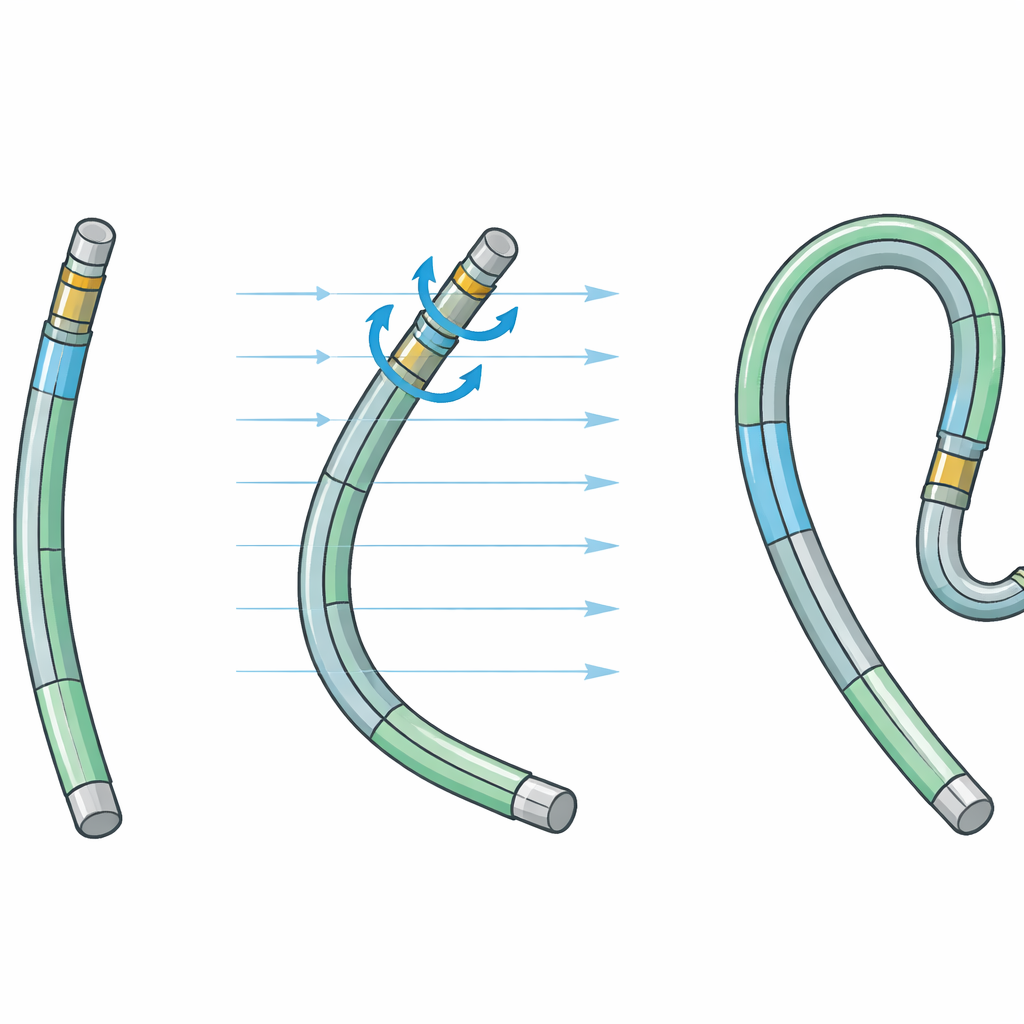
De drie mouwen werken samen om een groot scala aan vormen te creëren. De buitenste mouw draagt een ringenset zodat deze onder het MRI-veld soepel buigt maar nooit veel verder dan ongeveer een rechte hoek. De middelste mouw draagt een andere ring onder een andere hoek; door deze mouw ten opzichte van de buitenste te roteren en uit te schuiven, kan de buigrichting omkeren, waardoor de katheter terug kan krullen of een S-vormige kromming kan vormen. Een dunne binnenste mouw, voorzien van een klein metalen pennetje aan de punt, kan zich vervolgens in welke richting de gecombineerde structuur ook wijst uitstrekken en daardoor effectief een volledige cirkel aan mogelijke oriëntaties bestrijken. De onderzoekers ontwikkelden computermodellen die de magnetische krachten in balans brengen met de elastische weerstand van de gevlochten buizen, waardoor ze deze vormen kunnen voorspellen en afstemmen en tegelijkertijd de neiging tot plotseling snap-through-gedrag verminderen.
Testen in een model van de menselijke aorta
Om aan te tonen dat dit meer is dan een laboratoriumgadget, stuurde het team de CoSMA door een 3D-geprinte plastic replica van de boog van de menselijke aorta — de grote gebogen slagader die het hart verlaat en snel vertakt in vaten die het hoofd en de armen voorzien. Een onervaren gebruiker kon het apparaat handmatig vanaf buiten de MRI-scanner besturen en de katheter vanuit een gesimuleerde toegang via het been in elk van de vijf belangrijkste takken geleiden in minder dan tien minuten. De MRI leverde gedetailleerde driedimensionale beelden, waardoor de onderzoekers zowel de anatomie als de exacte vorm van de katheter tijdens het manoeuvreren konden reconstrueren, ondanks enkele onvermijdelijke donkere plekken waar de kleine metalen onderdelen het signaal verstoorden. De prototypebuitendiameter van 4 millimeter valt al binnen het bereik van klinische instrumenten, en de auteurs betogen dat verdere miniaturisatie mogelijk moet zijn naarmate de fabricagetechnieken verbeteren.
Stappen naar slimmer en veiliger navigeren
In hun discussie benadrukken de auteurs dat CoSMA een proof of concept is voor een nieuwe klasse MRI-gedreven, MRI-zichtbare katheters. Het huidige apparaat wordt handmatig bediend en de MRI-beelden worden offline verwerkt, maar dezelfde principes zouden toekomstige systemen kunnen ondersteunen die snelle MRI-scans automatisch interpreteren, de vorm van de katheter in realtime reconstrueren en de bewegingen van de mouwen dienovereenkomstig aanpassen. Ze schetsen de behoefte aan snellere beeldvorming, geautomatiseerde acturatiehardware en efficiëntere besturingssoftware, evenals compactere en nauwkeuriger afgewerkte magnetische componenten. Als deze engineeringuitdagingen worden opgelost, zou deze aanpak zachte, zeer wendbare katheters mogelijk maken die complexe bloedvaten met minimale kracht navigeren, allemaal onder stralingsvrije, driedimensionale begeleiding — en patiënten en behandelaars een zachtere manier bieden om enkele van de moeilijkste bestemmingen in het lichaam te bereiken.
Bronvermelding: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Trefwoorden: MRI-gestuurde katheter, soft robotics, endovasculaire ingreep, magnetische activering, concentrische buisrobot