Clear Sky Science · fr
Un cathéter à tubes concentriques pour interventions endoluminales, commandé et imagé par imagerie par résonance magnétique
Outils plus doux pour des interventions cardiaques délicates
Introduire des instruments profondément dans les vaisseaux sanguins est devenu courant en médecine moderne, que ce soit pour déboucher des artères ou traiter des troubles du rythme cardiaque. Pourtant, les cathéters actuels sont relativement rigides et sont généralement guidés par imagerie aux rayons X, ce qui expose patients et cliniciens aux radiations et ne fournit que des vues plates et ombrées. Cet article présente un nouveau type de cathéter souple et orientable, guidé et actionné par l’appareil d’imagerie par résonance magnétique (IRM) lui‑même, ouvrant la voie à des interventions plus sûres et plus précises dans certains des conduits corporels les plus fragiles.
Pourquoi il est difficile de diriger les cathéters actuels
Les cathéters conventionnels sont poussés et tournés depuis l’extérieur du corps, en s’appuyant sur l’habileté de l’opérateur et sur des tiges métalliques préformées pour atteindre le vaisseau ciblé. Leur rigidité, utile pour le contrôle, peut aussi endommager les tissus délicats et entraîner parfois des complications pendant ou après l’intervention. Des robots plus avancés de type « continuum » ou « à tubes concentriques » — constitués de multiples tubes pré‑courbés emboîtés les uns dans les autres — peuvent se plier dans de nombreuses directions, mais sont fabriqués à partir d’alliages très rigides. Cette rigidité peut provoquer des basculements soudains d’une forme à une autre, un comportement de « snap‑through » difficile à prévoir et risqué à l’intérieur du corps. Parallèlement, le suivi de ces dispositifs se fait le plus souvent par fluoroscopie aux rayons X, qui donne des informations tridimensionnelles limitées et augmente la dose de radiation.
Laisser l’IRM jouer un double rôle
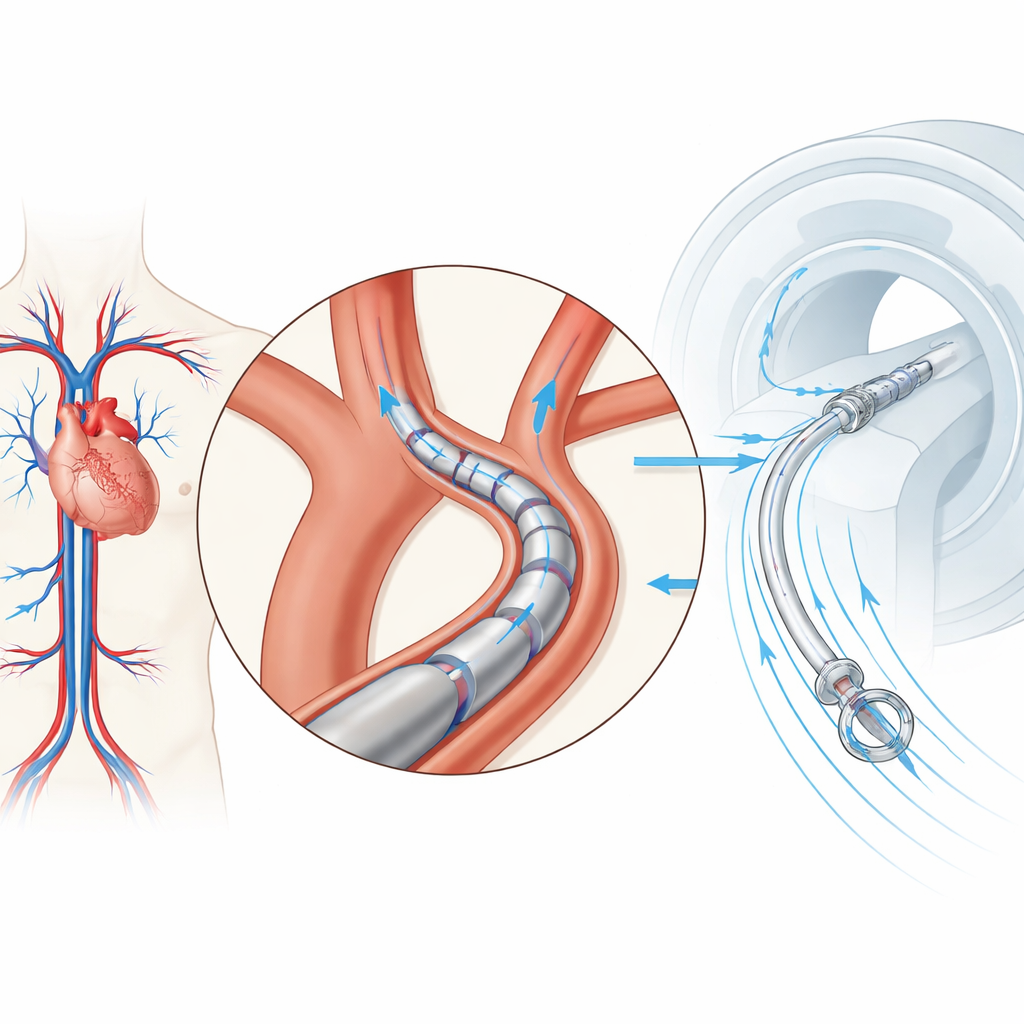
Les auteurs présentent un dispositif appelé Coaxial Sleeve Magnetic Actuator (CoSMA), un cathéter en trois parties conçu dès l’origine pour fonctionner à l’intérieur d’un scanner IRM. Plutôt que d’intégrer des aimants permanents ou des moteurs dans le cathéter, le CoSMA exploite discrètement le champ magnétique puissant et stable généré par chaque appareil d’IRM. De minuscules anneaux et broches en métal souple situés à l’extrémité de chacun des trois manchons concentriques cherchent naturellement à s’aligner sur ce champ. En faisant coulisser et tourner les manchons depuis l’extérieur du scanner, l’opérateur peut remodeler la pointe en utilisant le champ de l’IRM comme source d’énergie invisible. Comme le matériau des manchons ressemble davantage à du nylon tressé qu’à un métal élastique, la structure globale est environ mille fois plus souple que les robots à tubes concentriques typiques, ce qui réduit le risque de blessure en cas de contact avec la paroi vasculaire.
Comment le cathéter souple se plie et forme des boucles
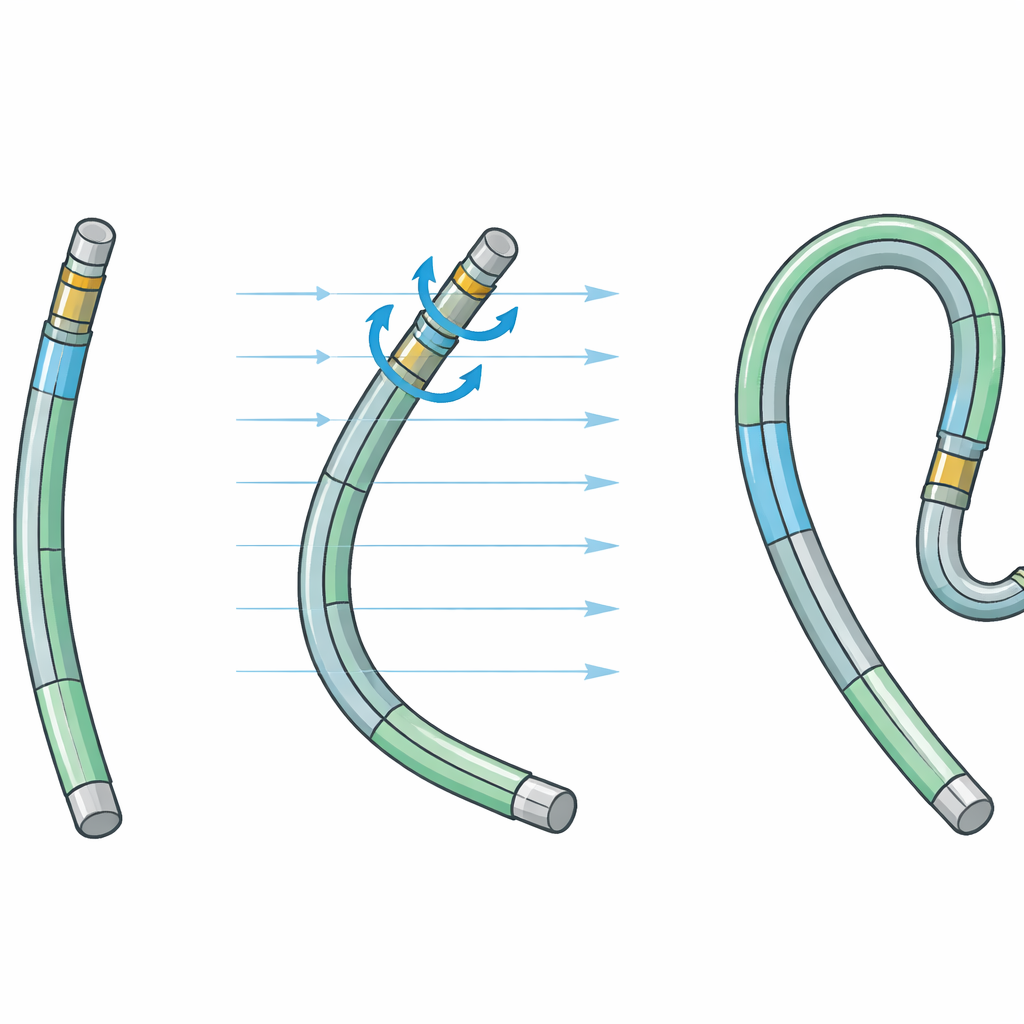
Les trois manchons agissent de concert pour créer une large gamme de formes. Le manchon extérieur porte un jeu d’anneaux de sorte que, sous le champ IRM, il se plie en douceur sans dépasser environ un angle droit. Le manchon central comporte un autre anneau à un angle différent ; en le faisant tourner et en le prolongeant par rapport à l’extérieur, on peut inverser la direction du pliage, amenant le cathéter à se recourber sur lui‑même ou à former une courbe en S. Un manchon intérieur fin, muni d’une petite broche métallique à son extrémité, peut ensuite s’étendre dans la direction indiquée par la structure combinée, balayant ainsi pratiquement tout un cercle d’orientations possibles. Les chercheurs ont développé des modèles numériques qui équilibrent les forces magnétiques et la résistance élastique des tubes tressés, leur permettant de prédire et d’ajuster ces formes tout en réduisant la propension aux basculements soudains.
Essais dans un modèle de l’aorte humaine
Pour démontrer que ce n’est pas qu’un gadget de laboratoire, l’équipe a piloté le CoSMA à travers une réplique en plastique imprimée en 3D de la crosse aortique humaine — la grande artère courbée quittant le cœur, qui se ramifie rapidement en vaisseaux irrigant la tête et les bras. En manipulant l’appareil manuellement depuis l’extérieur du scanner IRM, un utilisateur peu expérimenté a pu guider le cathéter depuis un point d’entrée simulé au niveau de la jambe vers chacune des cinq branches clés en moins de dix minutes. L’IRM a fourni des images tridimensionnelles détaillées, permettant aux chercheurs de reconstruire à la fois l’anatomie et la forme exacte du cathéter pendant sa navigation, malgré quelques zones d’ombre inévitables où les petites pièces métalliques perturbaient le signal. Le prototype, d’un diamètre externe de 4 millimètres, se situe déjà dans la gamme des outils cliniques, et les auteurs estiment qu’une miniaturisation supplémentaire devrait être possible avec l’amélioration des techniques de fabrication.
Vers une navigation plus intelligente et plus sûre
Dans leur discussion, les auteurs soulignent que le CoSMA constitue une preuve de concept pour une nouvelle classe de cathéters actionnés et visibles par IRM. L’appareil actuel est contrôlé manuellement et les images IRM sont traitées hors ligne, mais les mêmes principes pourraient alimenter des systèmes futurs qui interprètent automatiquement des séquences IRM rapides, reconstruisent la forme du cathéter en temps réel et ajustent les mouvements des manchons en conséquence. Ils détaillent la nécessité d’un imagerie plus rapide, d’un matériel d’actionnement automatisé et d’un logiciel de contrôle plus efficace, ainsi que de composants magnétiques plus compacts et finement usinés. Si ces défis d’ingénierie sont relevés, cette approche pourrait permettre des cathéters souples et hautement manœuvrables qui parcourent des vaisseaux complexes avec des forces minimales, sous guidage tridimensionnel sans radiation — offrant aux patients et aux cliniciens un moyen plus doux d’atteindre certaines des destinations corporelles les plus difficiles.
Citation: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Mots-clés: Cathéter guidé par IRM, robotique douce, intervention endovasculaire, action magnétique, robot à tubes concentriques