Clear Sky Science · ru
Конический катетер с концентрическими трубками для эндолюминальных вмешательств, управляемый и визуализируемый с помощью магнитно-резонансной томографии
Более бережные инструменты для тонких операций на сердце
Проводить инструменты глубоко по сосудам — обычная часть современной медицины: от восстановления проходимости артерий до лечения аритмий. Однако современные катетеры относительно жесткие и обычно направляются под рентгеновским контролем, что подвергает пациентов и врачей облучению и даёт лишь плоские, теневые изображения. В этой работе предложен новый тип мягкого управляемого катетера, который приводится в движение и визуализируется с помощью самого аппарата магнитно-резонансной томографии (МРТ), что обещает более безопасные и точные вмешательства в одних из самых хрупких анатомических проходов организма.
Почему современные катетеры тяжело направлять
Обычные катетеры продвигают и вращают снаружи тела, опираясь на мастерство оператора и на предварительно изогнутые металлические проволоки для выхода в нужный сосуд. Их жесткость, полезная для управляемости, может повредить нежные ткани и иногда приводить к осложнениям во время или после процедуры. Более сложные «континуумные» или «концентрические трубчатые» роботы — состоящие из нескольких предварительно изогнутых трубок, вложенных друг в друга — способны изгибаться во многих направлениях, но обычно выполнены из очень жестких сплавов. Такая жесткость может вызвать внезапные переходы из одной формы в другую (эффект «перепрыгивания»), что трудно предсказать и опасно внутри тела. Кроме того, слежение за такими устройствами обычно ведут с помощью рентгеновской флюороскопии, которая даёт ограниченную трёхмерную информацию и добавляет дозу радиации.
Позволить МРТ-сканеру выполнять двойную функцию
Авторы представляют устройство под названием Coaxial Sleeve Magnetic Actuator (CoSMA) — трехсекционный катетер, разработанный специально для работы внутри МРТ-сканера. Вместо того чтобы размещать в катетере постоянные магниты или моторы, CoSMA использует сильное постоянное магнитное поле, создаваемое любым аппаратом МРТ. Крошечные кольца и штифты из мягкого металла на наконечниках каждой из трех концентрических муфт естественно пытаются ориентироваться вдоль этого поля. Сдвигая и вращая муфты снаружи аппарата, оператор может изменять форму наконечника, используя поле МРТ как невидимый источник энергии. Поскольку материал муфт ближе по свойствам к плетеному нейлону, чем к упругому металлу, вся конструкция примерно в тысячу раз мягче типичных роботов с концентрическими трубками, что снижает риск повреждения стенок сосудов при контакте.
Как мягкий катетер изгибается и образует петли
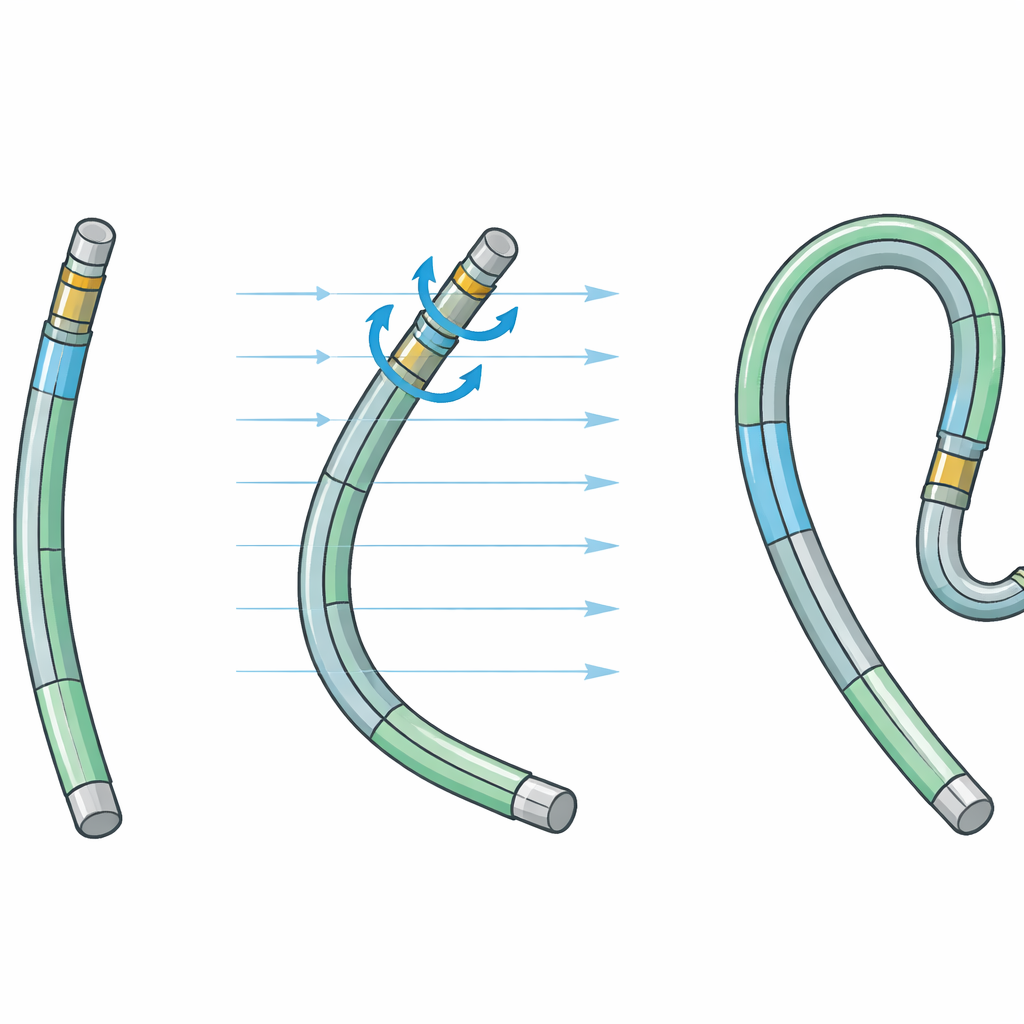
Три муфты работают вместе, формируя широкий спектр конфигураций. Внешняя муфта несёт набор колец так, что в магнитном поле она изгибается плавно, но никогда не более примерно прямого угла. Средняя муфта имеет другое кольцо под иным углом; вращение и выдвижение этой муфты относительно наружной меняет направление изгиба, заставляя катетер сворачиваться назад на себя или образовывать S-образную кривую. Тонкая внутренняя муфта с крошечным металлическим штифтом на конце может выдвигаться в любом направлении, куда указывает составная структура, эффективно описывая полный круг возможных ориентаций. Исследователи разработали компьютерные модели, которые уравновешивают магнитные силы и упругое сопротивление плетёных трубок, что позволяет предсказывать и настраивать формы, а также уменьшать склонность к внезапному перепрыгиванию конфигураций.
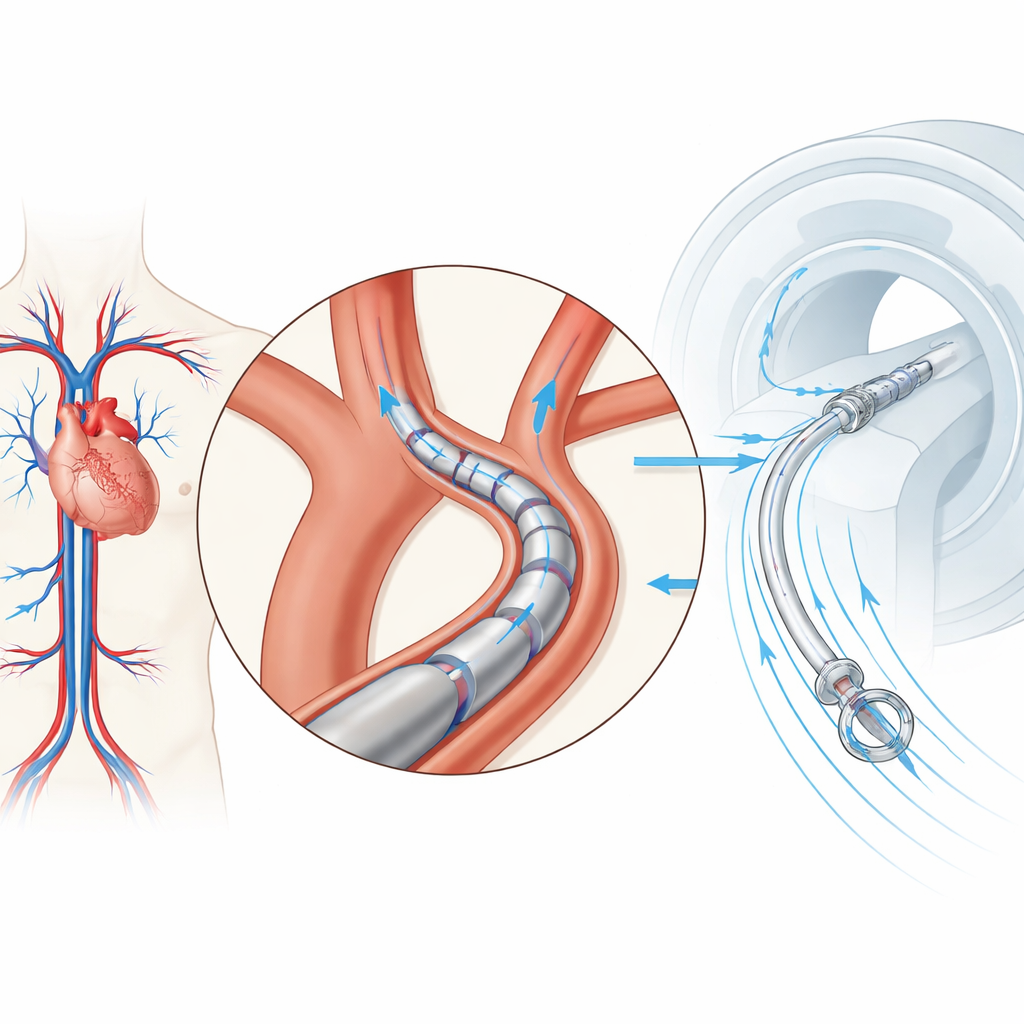
Испытания в модели человеческой аорты
Чтобы показать, что это не просто лабораторная игрушка, команда провела управление CoSMA внутри 3D-печатной пластиковой копии дуги аорты человека — большой изогнутой артерии, выходящей из сердца и быстро ветвящейся к голове и рукам. Управляя устройством вручную снаружи МРТ-сканера, даже неопытный пользователь смог провести катетер от моделируемого входа через ногу в каждую из пяти ключевых ветвей менее чем за десять минут. МРТ обеспечивала подробные трёхмерные изображения, позволившие исследователям восстановить как анатомию, так и точную форму катетера в процессе навигации, несмотря на неизбежные тёмные участки, где мелкие металлические детали нарушали сигнал. Прототип с наружным диаметром 4 мм уже находится в пределах типичных клинических инструментов, и авторы утверждают, что дальнейшая миниатюризация возможна по мере совершенствования технологий изготовления.
Шаги к более умной и безопасной навигации
В обсуждении авторы подчёркивают, что CoSMA — это демонстрация концепции нового класса устройств, приводимых в действие и видимых при МРТ. Текущее устройство управляется вручную, а МРТ-изображения обрабатываются офлайн, но те же принципы могут лечь в основу будущих систем, которые автоматически интерпретируют быстрые МРТ-сканы, в реальном времени восстанавливают форму катетера и соответственно корректируют движения муфт. Они отмечают необходимость более быстрого сканирования, автоматизированной аппаратуры для приведения в действие и более эффективного программного управления, а также компактных и аккуратно обработанных магнитных компонентов. При решении этих инженерных задач подход может обеспечить мягкие, высокоманевренные катетеры, которые проходят сложные сосудистые пути с минимальным давлением, под безрадиационным трёхмерным контролем — предложив пациентам и врачам более бережный способ доступа к труднодоступным участкам организма.
Цитирование: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Ключевые слова: катетер с управлением МРТ, мягкая робототехника, эндоваскулярное вмешательство, магнитное управление, робот с концентрическими трубками