Clear Sky Science · it
Un catetere a tubi concentrici per interventi endoluminali, diretto e immaginato tramite risonanza magnetica
Strumenti più delicati per procedure cardiache sensibili
Inserire strumenti nelle profondità dei vasi sanguigni è una pratica routinaria della medicina moderna, impiegata per tutto, dall’aprire arterie occluse al trattamento delle aritmie. Tuttavia, i cateteri attuali sono relativamente rigidi e di norma vengono guidati con immagini a raggi X, che espongono sia i pazienti sia gli operatori a radiazioni e forniscono soltanto viste piatte e in ombra. Questo articolo presenta un nuovo tipo di catetere morbido e sterzabile che viene guidato e azionato direttamente da uno scanner di risonanza magnetica (MRI), aprendo la strada a procedure più sicure e precise all’interno di alcuni dei passaggi corporei più fragili.
Perché gli attuali cateteri sono difficili da manovrare
I cateteri convenzionali vengono spinti e torcigliati dall’esterno del corpo, facendo affidamento sull’abilità dell’operatore e su fili metallici preformati per raggiungere il vaso giusto. La loro rigidità, utile per il controllo, può anche danneggiare i tessuti delicati e talvolta causare complicazioni durante o dopo la procedura. Robot «a continuum» o a «tubi concentrici» più avanzati—composti da più tubi precurvati annidati uno dentro l’altro—possono flettersi in molte direzioni, ma sono costruiti con leghe molto rigide. Questa rigidità può provocare salti improvvisi da una forma all’altra, un comportamento di snap-through difficile da prevedere e rischioso all’interno del corpo. Allo stesso tempo, il tracciamento di questi dispositivi viene di solito effettuato con fluoroscopia a raggi X, che fornisce informazioni tridimensionali limitate e aumenta la dose di radiazione.
Far svolgere allo scanner MRI una doppia funzione
Gli autori presentano un dispositivo chiamato Coaxial Sleeve Magnetic Actuator (CoSMA), un catetere composto da tre parti progettato fin dall’inizio per funzionare all’interno di uno scanner MRI. Piuttosto che inserire magneti permanenti o motori nel catetere, CoSMA sfrutta in modo discreto il potente e stabile campo magnetico generato da ogni macchina di risonanza. Anelli e perni in metallo tenero, posti sulla punta di ciascuna delle tre maniche concentriche, tendono naturalmente ad allinearsi con questo campo. Scorrendo e ruotando le maniche dall’esterno dello scanner, l’operatore può rimodellare la punta, usando il campo della MRI come una sorgente di energia invisibile. Poiché il materiale delle maniche somiglia più a nylon intrecciato che a metallo elastico, la struttura complessiva è circa mille volte più morbida rispetto ai tipici robot a tubi concentrici, riducendo il rischio di lesioni se preme contro le pareti dei vasi.
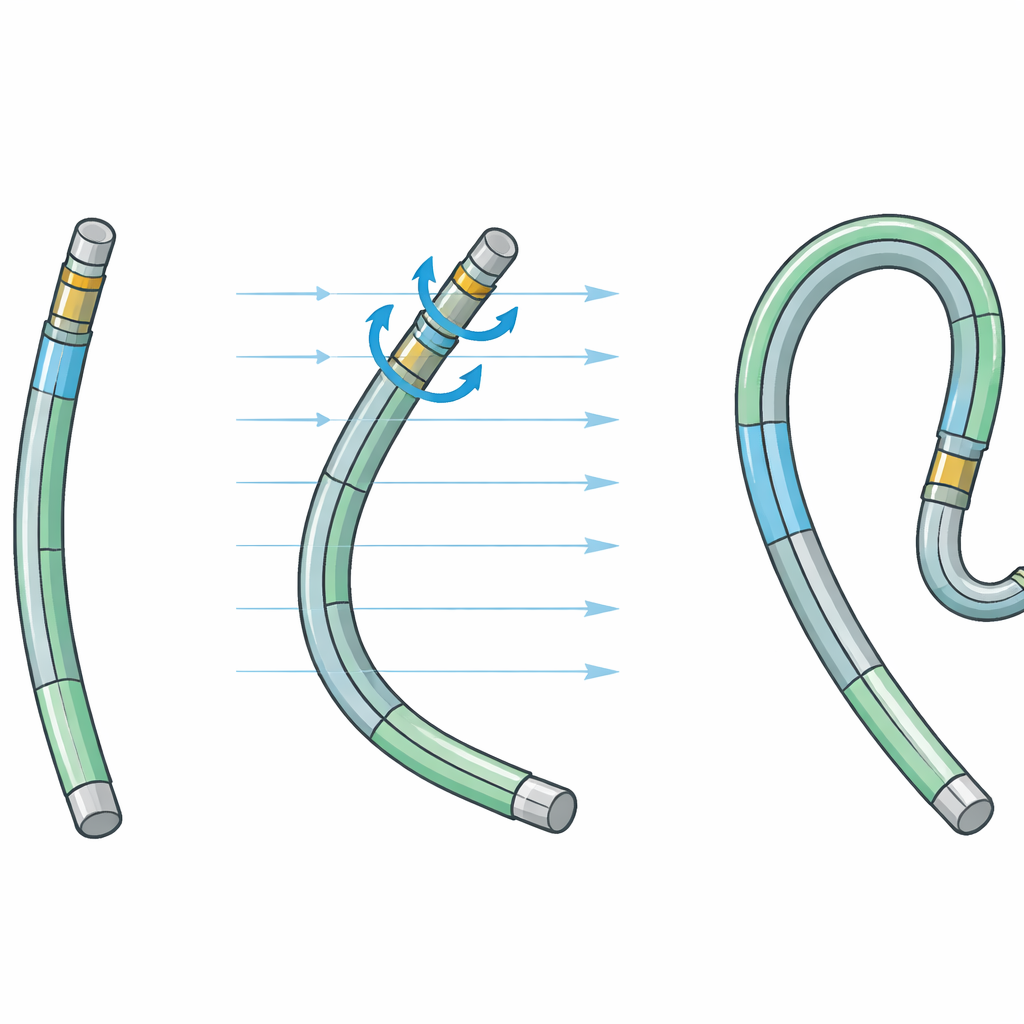
Come il catetere morbido si piega e si avvolge
Le tre maniche lavorano insieme per creare una vasta gamma di forme. La manica più esterna ospita un set di anelli che, sotto il campo MRI, la fanno flettere in modo morbido ma non oltre circa un angolo retto. La manica centrale porta un altro anello con un angolo diverso; ruotando ed estendendo questa manica rispetto a quella esterna si può invertire la direzione della curvatura, facendo sì che il catetere si richiuda su sé stesso o assuma una curva a S. Una sottile manica interna, terminante con un piccolo perno metallico, può poi estendersi nella direzione indicata dalla struttura combinata, spazzando effettivamente un cerchio completo di orientamenti possibili. I ricercatori hanno sviluppato modelli al computer che bilanciano le forze magnetiche con la resistenza elastica dei tubi intrecciati, permettendo di prevedere e tarare queste forme riducendo al contempo la tendenza allo snap-through improvviso.
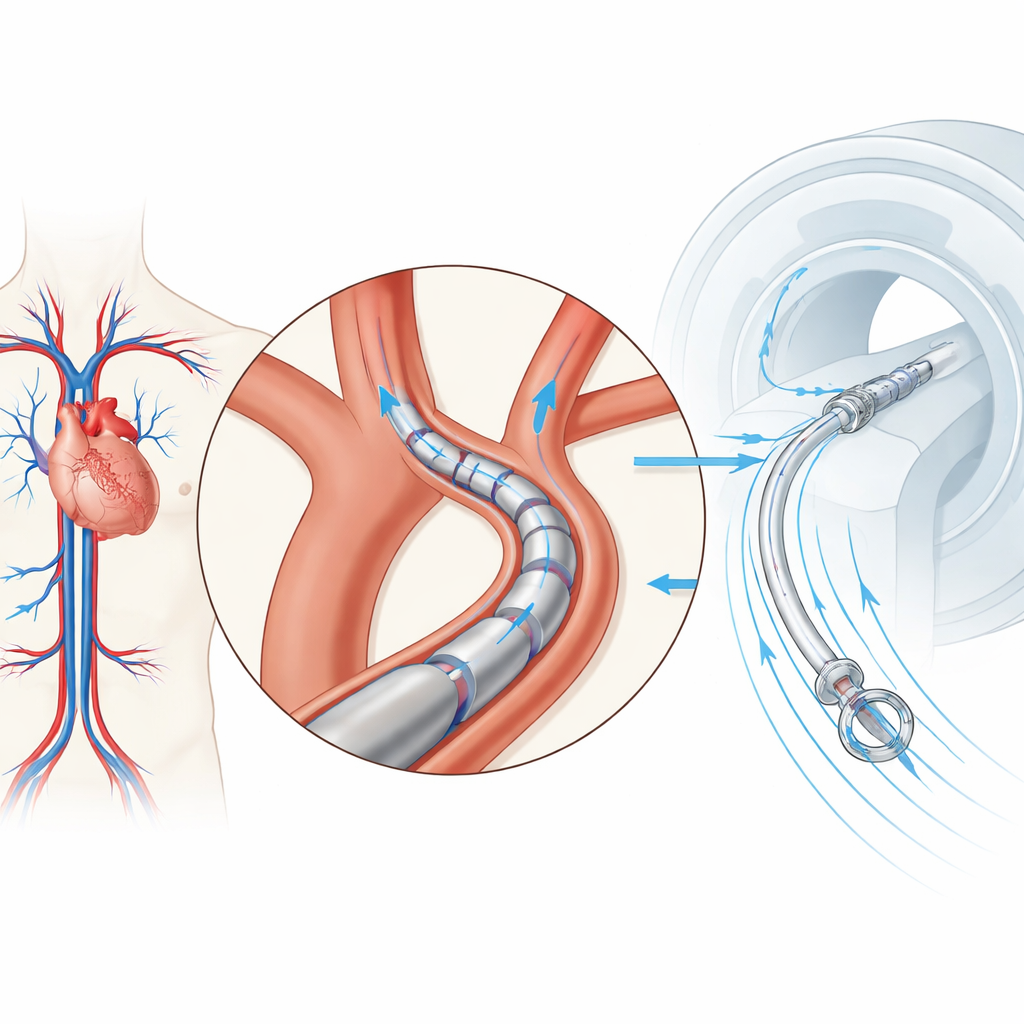
Test all’interno di un modello dell’aorta umana
Per dimostrare che si tratta di qualcosa di più di un giocattolo da laboratorio, il team ha guidato il CoSMA attraverso una replica in plastica stampata in 3D dell’arco aortico umano—la grande arteria curva che esce dal cuore e si biforca rapidamente nei vasi che irrorano testa e braccia. Azionando il dispositivo manualmente dall’esterno dello scanner MRI, un utente non esperto è riuscito a guidare il catetere da un ipotetico punto di ingresso nella gamba verso ciascuno dei cinque rami principali in meno di dieci minuti. La MRI ha fornito immagini tridimensionali dettagliate, consentendo ai ricercatori di ricostruire sia l’anatomia sia la forma esatta del catetere durante la navigazione, nonostante alcuni punti scuri inevitabili causati dalle piccole parti metalliche che disturbavano il segnale. Il prototipo, con un diametro esterno di 4 millimetri, rientra già nella gamma degli strumenti clinici, e gli autori sostengono che una ulteriore miniaturizzazione dovrebbe essere possibile con il miglioramento delle tecniche di fabbricazione.
Passi verso una navigazione più intelligente e sicura
Nella loro discussione, gli autori sottolineano che CoSMA è una prova di principio per una nuova classe di cateteri guidati e visibili con MRI. Il dispositivo attuale è controllato a mano e le immagini MRI vengono elaborate offline, ma gli stessi principi potrebbero supportare sistemi futuri che interpretano automaticamente scansioni MRI veloci, ricostruiscono la forma del catetere in tempo reale e regolano di conseguenza i movimenti delle maniche. Gli autori delinea‑no la necessità di imaging più rapido, hardware di attuazione automatizzato e software di controllo più efficiente, oltre a componenti magnetici più compatti e rifiniti con cura. Se queste sfide ingegneristiche saranno superate, questo approccio potrebbe abilitare cateteri morbidi e altamente manovrabili che navigano nei vasi complessi con forze minime, il tutto sotto guida tridimensionale priva di radiazioni—offrendo a pazienti e operatori un modo più delicato per raggiungere alcune delle destinazioni più difficili del corpo.
Citazione: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Parole chiave: Catetere guidato da MRI, robotica morbida, intervento endovascolare, attuazione magnetica, robot a tubi concentrici