Clear Sky Science · ja
磁気共鳴画像で操作・撮像される同心チューブ型カテーテルによる内腔内介入
繊細な心臓治療のためのやさしい道具
器具を体内の血管深部へ挿入することは、閉塞した動脈の開通から不整脈の治療に至るまで、現代医療で日常的に行われています。しかし現在のカテーテルは比較的剛性があり、通常はX線画像で誘導されるため、患者と術者の双方が放射線にさらされ、平面的で陰影の多い映像しか得られません。本論文は、磁気共鳴画像(MRI)装置そのものによって誘導・駆動される、新しいタイプの柔らかく操作可能なカテーテルを示しており、体内の非常に繊細な通路に対してより安全で精密な処置を可能にする方向を示しています。
なぜ現在のカテーテルは操作が難しいのか
従来のカテーテルは体外から押し込んだりねじったりして操作され、術者の技術と予め成形された金属ワイヤに頼って目的の血管へ到達します。制御に有利なその剛性は同時に繊細な組織を傷つける原因になり、処置中や術後に合併症を引き起こすことがあります。複数のあらかじめ曲げられたチューブを入れ子状にした「連続体」あるいは「同心チューブ」ロボットは多方向に曲げられますが、非常に硬い合金で作られることが多い。その剛性は形状が突然変化するスナップスルーと呼ばれる挙動を引き起こしやすく、体内では予測が難しく危険です。同時に、これらデバイスの追跡は通常X線透視で行われ、三次元情報は限定的であり放射線被ばくも伴います。
MRI装置を二重の役割で活用する
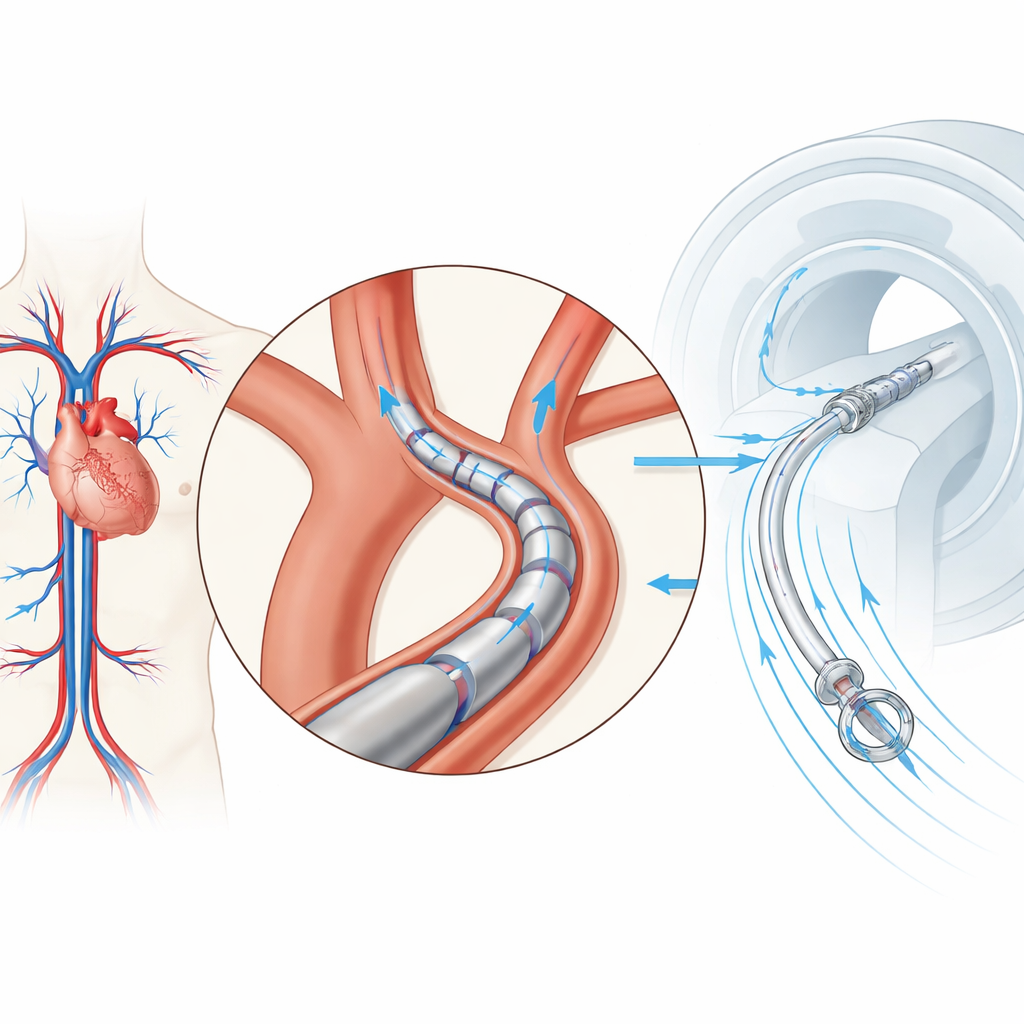
著者らはCoaxial Sleeve Magnetic Actuator(CoSMA)と呼ばれる装置を紹介します。これはMRIスキャナ内での使用を前提に設計された三層構造のカテーテルです。カテーテル先端に永久磁石やモーターを詰め込む代わりに、CoSMAは静かに各MRI装置が生成する強力で安定した磁場を利用します。三つの同心スリーブそれぞれの先端にある微小な軟性金属リングとピンは、この磁場に整列しようとします。スキャナ外からスリーブをスライドさせ回転させることで、術者はMRIの磁場を目に見えないエネルギー源として用い、先端の形状を変えることができます。スリーブの材料はばね金属というより編み込まれたナイロンに近いため、全体の構造剛性は従来の同心チューブロボットと比べて概ね千分の一程度に低く、血管壁に接触した場合の損傷リスクが下がります。
柔らかいカテーテルの曲がり方とループ形成
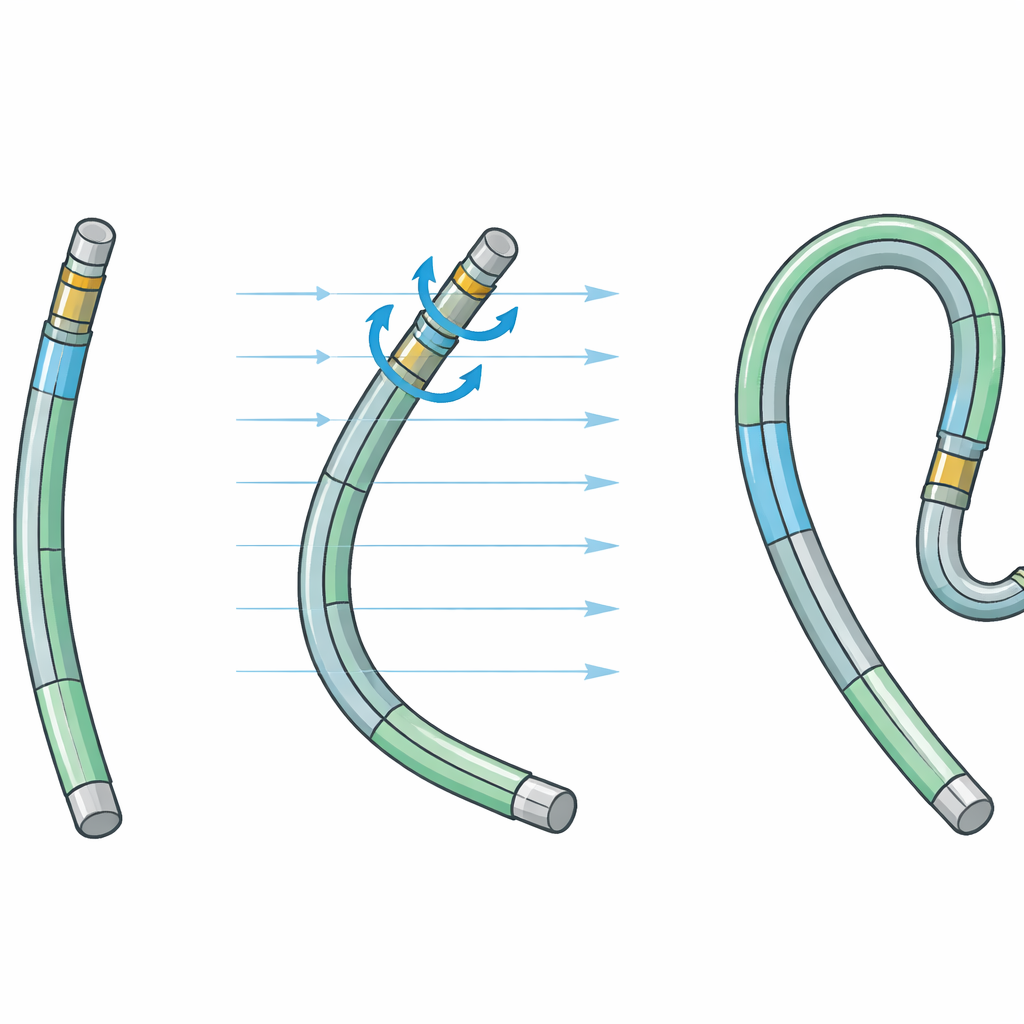
三つのスリーブは協調して多彩な形状を生み出します。最外層のスリーブはリングセットを備え、MRI磁場下で滑らかに曲がるが直角程度を超えないように挙動が制限されます。中間のスリーブは別角度のリングを持ち、このスリーブを外側のものに対して回転・伸縮させることで曲がる方向を反転させ、先端が自分自身に巻き戻るような動きやS字カーブを作れます。細い内側スリーブは小さな金属ピンを先端に持ち、複合構造が向いた方向へ伸び出して一周にわたる指向性を実質的に掃くことができます。研究者らは編組チューブの弾性抵抗と磁気力の釣り合いを計算するモデルを開発し、これらの形状を予測・調整しながら、急激なスナップスルーの傾向を抑えることに成功しました。
人体大動脈モデル内での試験
実験が単なる室内の玩具に留まらないことを示すため、研究チームはCoSMAを心臓から出てすぐに分岐する大きな湾曲動脈である大動脈弓の3D印刷プラスチック模型を通して操作しました。MRIスキャナの外から手動で装置を操作したところ、経験の浅い操作者でもシミュレートされた脚の挿入点から五つの主要分岐それぞれへ十分以内にカテーテルを導くことができました。MRIは詳細な三次元画像を提供し、微小な金属部品が信号を乱すために避けられない暗点はあるものの、解剖学的構造とカテーテルの正確な形状を再構成可能でした。試作機の外径4ミリメートルは既に臨床用器具の範囲にあり、製造技術が進めばさらに小型化が可能だと著者らは主張しています。
より賢く安全なナビゲーションへの道筋
議論の中で著者らは、CoSMAがMRI駆動でMRI可視化可能な新しいクラスのカテーテルの概念実証であることを強調しています。現状の装置は手動で制御され、MRI画像はオフラインで処理されますが、同じ原理は高速MRI走査を自動的に解釈してカテーテル形状をリアルタイムで再構成し、スリーブ操作を適応させる将来のシステムを支える可能性があります。より高速な撮像、自動駆動ハードウェア、効率的な制御ソフトウェア、そしてより小型で仕上げの良い磁性部品が必要です。これらの工学的課題が解決されれば、放射線を用いない三次元誘導下で、最小限の力で複雑な血管を通過できる柔らかく高い機動性を持つカテーテルが実現し、患者と術者にとって最も困難な体内到達点への穏やかな到達手段を提供する可能性があります。
引用: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
キーワード: MRI誘導カテーテル, ソフトロボティクス, 血管内治療, 磁気駆動, 同心チューブロボット