Clear Sky Science · pt
Um cateter de tubos concêntricos para intervenções endoluminais, direcionado e imageado por ressonância magnética
Ferramentas mais suaves para procedimentos cardíacos delicados
Introduzir instrumentos profundamente nos vasos sanguíneos é uma prática rotineira da medicina moderna, usada desde a desobstrução de artérias até o tratamento de arritmias. No entanto, os cateteres atuais são relativamente rígidos e geralmente são guiados por imagens de raios X, que expõem pacientes e profissionais à radiação e oferecem apenas vistas planas e sombreadas. Este artigo apresenta um novo tipo de cateter macio e direcionável que é guiado e acionado pelo próprio aparelho de ressonância magnética (RM), apontando para procedimentos mais seguros e precisos em alguns dos túneis corporais mais frágeis.
Por que os cateteres atuais são difíceis de manobrar
Cateteres convencionais são empurrados e torcidos a partir do exterior do corpo, dependendo da habilidade do operador e de fios metálicos pré-moldados para alcançar o vaso certo. Sua rigidez, útil para controle, também pode danificar tecidos delicados e ocasionalmente provocar complicações durante ou após o procedimento. Robôs mais avançados do tipo “contínuo” ou “tubo concêntrico” — feitos de múltiplos tubos pré-curvados encaixados um dentro do outro — podem dobrar em muitas direções, mas costumam ser construídos em ligas muito rígidas. Essa rigidez pode causar saltos repentinos de uma forma para outra, um comportamento de snap-through difícil de prever e arriscado dentro do corpo. Ao mesmo tempo, o rastreamento desses dispositivos geralmente é feito com fluoroscopia por raios X, que fornece informação tridimensional limitada e aumenta a dose de radiação.
Deixar o aparelho de RM exercer dupla função
Os autores apresentam um dispositivo chamado Atuador Magnético de Manga Coaxial (CoSMA), um cateter em três partes projetado desde o início para operar dentro de um scanner de RM. Em vez de embutir ímãs permanentes ou motores no cateter, o CoSMA aproveita discretamente o campo magnético potente e constante que todo aparelho de RM gera. Pequenos anéis e pinos de metal macio na ponta de cada uma das três mangas concêntricas tendem naturalmente a se alinhar com esse campo. Ao deslizar e girar as mangas a partir do exterior do scanner, o operador pode remodelar a ponta, usando o campo da RM como uma fonte de energia invisível. Como o material das mangas se assemelha mais a náilon trançado do que a metal elástico, a estrutura geral é aproximadamente mil vezes mais macia do que robôs de tubo concêntrico típicos, o que reduz o risco de lesão se houver contato com as paredes dos vasos.
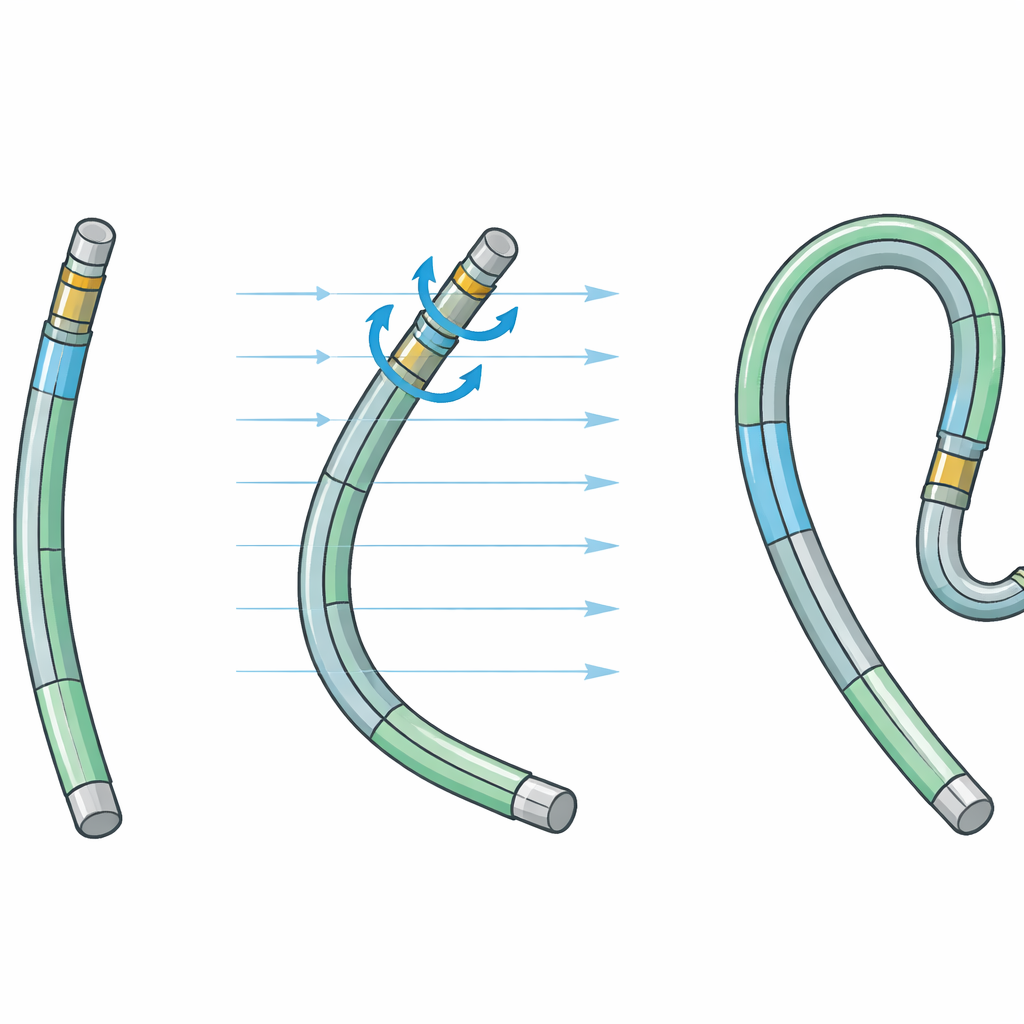
Como o cateter macio dobra e forma laçadas
As três mangas trabalham em conjunto para criar uma ampla variedade de formas. A manga mais externa carrega um conjunto de anéis de modo que, sob o campo de RM, ela se dobra suavemente, mas nunca além de cerca de um ângulo reto. A manga do meio carrega outro anel em um ângulo diferente; girar e estender essa manga em relação à externa pode inverter a direção da flexão, fazendo com que o cateter se curve de volta sobre si mesmo ou forme uma curva em S. Uma manga interna fina, com uma pequena haste metálica na ponta, pode então se estender na direção em que a estrutura combinada aponta, efetivamente varrendo um círculo completo de orientações possíveis. Os pesquisadores desenvolveram modelos computacionais que equilibram as forças magnéticas com a resistência elástica dos tubos trançados, permitindo prever e ajustar essas formas e ao mesmo tempo reduzir a tendência a saltos repentinos.
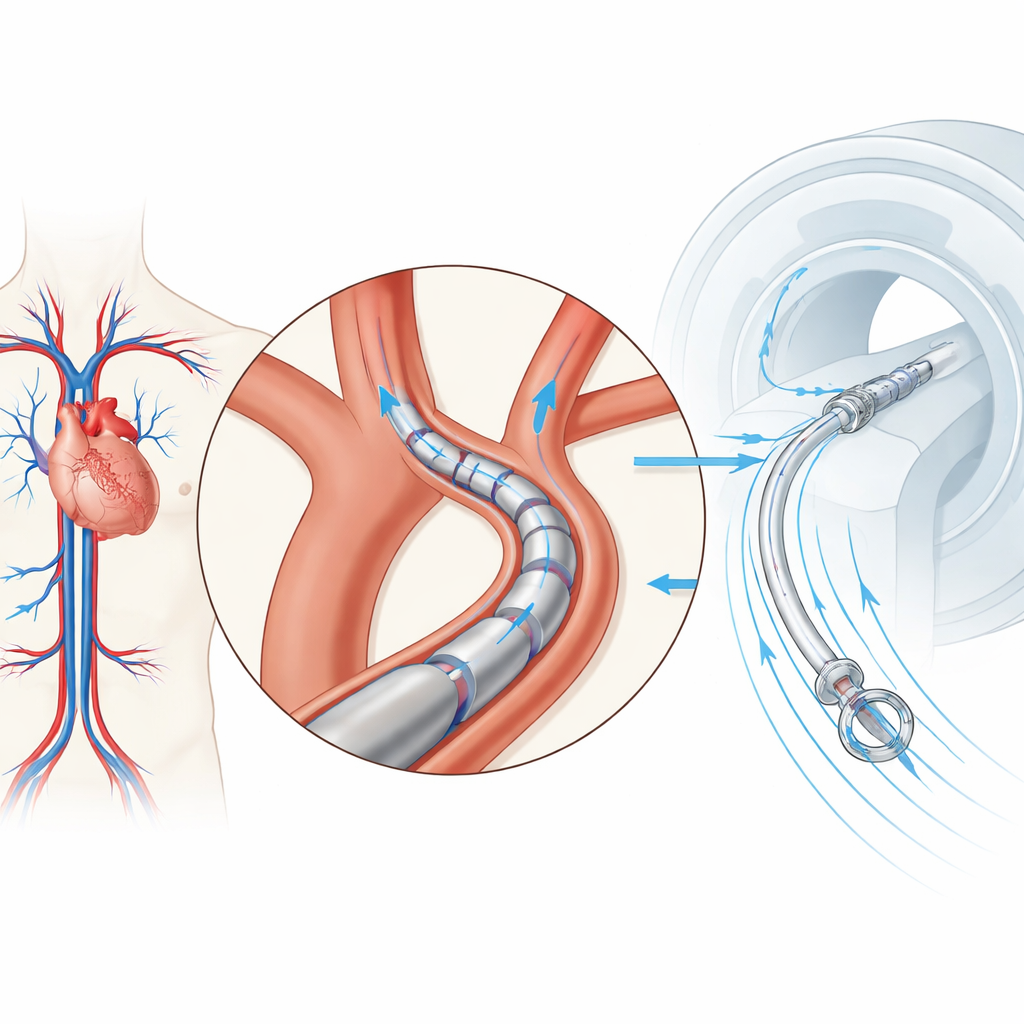
Testes dentro de um modelo da aorta humana
Para demonstrar que não se trata apenas de um brinquedo de laboratório, a equipe guiou o CoSMA através de uma réplica plástica impressa em 3D do arco aórtico humano — a grande artéria curva que sai do coração e logo se ramifica em vasos que irrigam a cabeça e os braços. Operando o dispositivo manualmente a partir do exterior do scanner de RM, um usuário sem experiência conseguiu conduzir o cateter desde um ponto de entrada simulado na perna até cada um dos cinco ramos principais em menos de dez minutos. A RM forneceu imagens tridimensionais detalhadas, permitindo aos pesquisadores reconstruir tanto a anatomia quanto a forma exata do cateter enquanto ele navegava, apesar de algumas regiões escuras inevitáveis onde as pequenas peças metálicas perturbaram o sinal. O diâmetro externo do protótipo de 4 milímetros já está dentro da faixa de ferramentas clínicas, e os autores afirmam que nova miniaturização deve ser possível à medida que as técnicas de fabricação melhorarem.
Passos rumo a uma navegação mais inteligente e segura
Na discussão, os autores enfatizam que o CoSMA é uma prova de conceito para uma nova classe de cateteres guiados e visíveis por RM. O dispositivo atual é controlado manualmente e as imagens de RM são processadas off-line, mas os mesmos princípios poderiam suportar sistemas futuros que interpretem automaticamente varreduras rápidas de RM, reconstruam a forma do cateter em tempo real e ajustem os movimentos das mangas em conformidade. Eles descrevem a necessidade de imagens mais rápidas, hardware de atuação automatizado e software de controle mais eficiente, assim como componentes magnéticos mais compactos e acabados com maior cuidado. Se esses desafios de engenharia forem superados, essa abordagem pode viabilizar cateteres macios e altamente manobráveis que naveguem por vasos complexos com força mínima, tudo sob orientação tridimensional livre de radiação — oferecendo a pacientes e profissionais um modo mais suave de alcançar alguns dos destinos corporais mais difíceis.
Citação: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Palavras-chave: cateter guiado por RM, robótica macia, intervenção endovascular, acionamento magnético, robô de tubo concêntrico