Clear Sky Science · sv
En koncentrisk rörkateter för endoluminala ingrepp, styrd och avbildad via magnetresonansavbildning
Mildare verktyg för känsliga hjärtingrepp
Att föra instrument djupt in i kroppens blodkärl är en rutinprocedur i modern medicin, använd för allt från att öppna tilltäppta artärer till att behandla oregelbundna hjärtrytmer. Dagens katetrar är emellertid relativt styva och styrs vanligtvis med röntgenavbildning, vilket utsätter både patienter och vårdpersonal för strålning och ger bara platta, skuggiga vyer. Denna artikel presenterar en ny typ av mjuk, styrbar kateter som styrs och drivs av magnetresonansavbildaren (MRI) själv, och som pekar mot säkrare och mer precisa ingrepp i några av kroppens mest sköra passager.
Varför dagens katetrar är svåra att styra
Konventionella katetrar trycks och vrids från utsidan av kroppen och förlitar sig på operatörens skicklighet och förformade metalltrådar för att nå rätt kärl. Deras styvhet, som hjälper till med kontrollen, kan också skada känslig vävnad och ibland leda till komplikationer under eller efter ingreppet. Mer avancerade ”kontinuerliga” eller ”koncentriska rör”-robotar — uppbyggda av flera förkurvade rör som ligger inne i varandra — kan böjas i många riktningar, men de är tillverkade av mycket styva legeringar. Denna styvhet kan orsaka plötsliga hopp från en form till en annan, ett snap‑through‑beteende som är svårt att förutsäga och riskfyllt inuti kroppen. Samtidigt spåras dessa enheter vanligtvis med röntgenfluoroskopi, vilket ger begränsad tredimensionell information och ökar stråldosen.
Låt MRI‑skannern göra dubbeltjänst
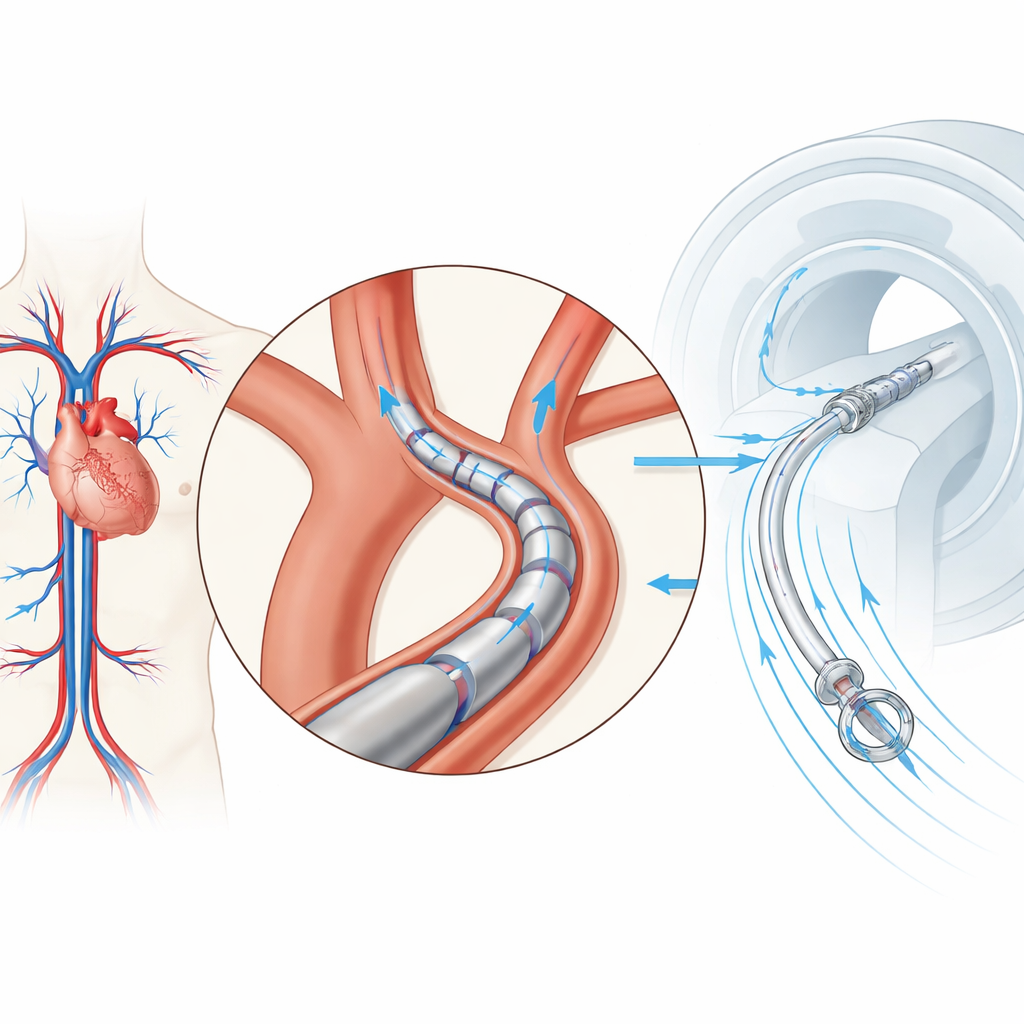
Författarna introducerar en enhet kallad Coaxial Sleeve Magnetic Actuator (CoSMA), en tripartit kateter designad från grunden för att fungera inne i en MRI‑skanner. Istället för att stoppa in permanenta magneter eller motorer i katetern utnyttjar CoSMA tyst den kraftfulla, jämna magnetfält som varje MRI‑maskin genererar. Små mjukmetallringar och pinnar i spetsen av var och en av de tre koncentriska ärmarna försöker naturligt anpassa sig efter detta fält. Genom att skjuta och rotera ärmarna från utsidan av skannern kan operatören omforma spetsen och använda MRI‑fältet som en osynlig energikälla. Eftersom ärmarnas material liknar flätad nylon mer än fjädrande metall är den övergripande strukturen ungefär tusen gånger mjukare än typiska koncentriska rörrobotar, vilket minskar risken för skada om den trycker mot kärlväggar.
Hur den mjuka katetern böjer och slingrar sig
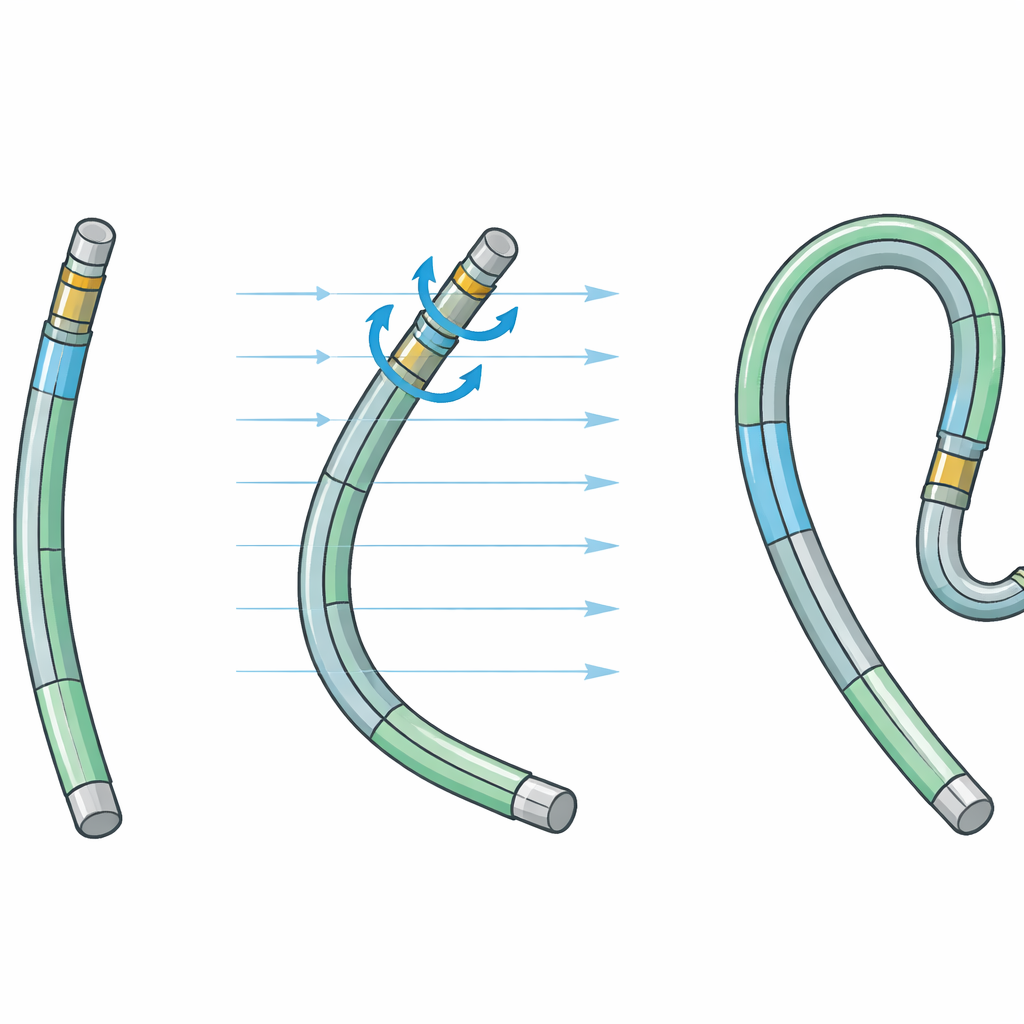
De tre ärmarna samverkar för att skapa ett brett spektrum av former. Den yttersta ärmen bär en ringsats så att den, under MRI‑fältet, böjer sig jämnt men aldrig längre än ungefär en rät vinkel. Den mellersta ärmen har en annan ring i en annan vinkel; genom att rotera och förlänga denna ärm i förhållande till den yttre kan böjriktningen vändas, vilket får katetern att krulla tillbaka på sig själv eller bilda en S‑formad kurva. En tunn innerärm, spetsad med en liten metallpinne, kan sedan förlängas i den riktning som den kombinerade strukturen pekar och effektivt svepa genom en hel cirkel av möjliga orienteringar. Forskarna utvecklade dator modeller som balanserar magnetkrafterna med den elastiska resistansen i de flätade rören, vilket låter dem förutsäga och finjustera dessa former samtidigt som tendensen till plötsligt snap‑through minskas.
Testning i en modell av den mänskliga aortan
För att visa att detta är mer än ett laboratorieexperiment styrde teamet CoSMA genom en 3D‑utskriven plastkopia av den mänskliga aortabågen — den stora böjda artär som lämnar hjärtat och snabbt förgrenar sig till kärl som försörjer huvud och armar. Genom att manövrera enheten manuellt utanför MRI‑skannern kunde en oerfaren användare vägleda katetern från en simulerad ingångspunkt i benet till var och en av de fem viktiga grenarna på under tio minuter. MRI gav detaljerade tredimensionella bilder, vilket gjorde det möjligt för forskarna att rekonstruera både anatomien och den exakta formen på katetern när den navigerade, trots några oundvikliga mörka fläckar där de små metalldelarna störde signalen. Prototypens yttre diameter på 4 millimeter ligger redan inom spannet för kliniska verktyg, och författarna menar att ytterligare miniaturisering bör vara möjlig i takt med förbättrade tillverkningstekniker.
Steg mot smartare, säkrare navigation
I diskussionen framhåller författarna att CoSMA är ett konceptbevis för en ny klass av MRI‑drivna, MRI‑synliga katetrar. Den nuvarande enheten styrs för hand och MRI‑bilderna bearbetas offline, men samma principer skulle kunna stödja framtida system som automatiskt tolkar snabba MRI‑skanningar, rekonstruerar kateterns form i realtid och justerar ärmrörelserna därefter. De skisserar behovet av snabbare avbildning, automatiserad aktueringshårdvara och mer effektiv styrprogramvara, liksom mer kompakta och noggrant bearbetade magnetiska komponenter. Om dessa ingenjörsutmaningar möts kan detta tillvägagångssätt möjliggöra mjuka, mycket manövrerbara katetrar som navigerar komplexa blodkärl med minimal kraft, allt under strålningsfri, tredimensionell vägledning — vilket erbjuder patienter och kliniker ett mildare sätt att nå några av kroppens svåraste destinationer.
Citering: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Nyckelord: MRI‑styrd kateter, mjukrobotik, endovaskulärt ingrepp, magnetisk aktuation, koncentrisk rörrobot