Clear Sky Science · es
Un catéter de tubos concéntricos para intervenciones endoluminales, dirigido e imagen por resonancia magnética
Herramientas más suaves para procedimientos cardíacos delicados
Introducir instrumentos profundamente en los vasos sanguíneos es una práctica habitual en la medicina moderna, utilizada desde la apertura de arterias obstruidas hasta el tratamiento de arritmias. Sin embargo, los catéteres actuales son relativamente rígidos y normalmente se guían con imágenes de rayos X, lo que expone tanto a pacientes como a clínicos a radiación y ofrece vistas planas y sombrías. Este artículo presenta un nuevo tipo de catéter blando y maniobrable que se guía y alimenta mediante el propio escáner de resonancia magnética (RM), apuntando a procedimientos más seguros y precisos en algunos de los conductos más frágiles del cuerpo.
Por qué es difícil dirigir los catéteres actuales
Los catéteres convencionales se empujan y giran desde fuera del cuerpo, confiando en la habilidad del operador y en alambres metálicos con forma previa para alcanzar el vaso correcto. Su rigidez, útil para el control, también puede dañar tejidos delicados y ocasionalmente provoca complicaciones durante o después del procedimiento. Robots más avanzados de tipo “continuum” o de “tubos concéntricos”, compuestos por varios tubos precurvados anidados unos dentro de otros, pueden flexionarse en muchas direcciones, pero están fabricados con aleaciones muy rígidas. Esa rigidez puede provocar saltos repentinos de una forma a otra, un comportamiento de colapso brusco difícil de predecir y arriesgado dentro del cuerpo. Al mismo tiempo, el seguimiento de estos dispositivos suele realizarse con fluoroscopia por rayos X, que proporciona información tridimensional limitada y añade dosis de radiación.
Dejar que el escáner de RM haga doble función
Los autores presentan un dispositivo llamado Actuador Magnético de Mangas Coaxiales (CoSMA), un catéter de tres partes diseñado desde cero para funcionar dentro de un escáner de RM. En lugar de incorporar imanes permanentes o motores en el catéter, CoSMA aprovecha discretamente el potente y estable campo magnético que genera cualquier máquina de RM. Pequeños anillos y pasadores de metal blando en la punta de cada una de las tres mangas concéntricas intentan alinearse naturalmente con ese campo. Al deslizar y rotar las mangas desde fuera del escáner, el operador puede remodelar la punta, utilizando el campo de la RM como una fuente de energía invisible. Debido a que el material de las mangas se asemeja más a un nailon trenzado que a un metal elástico, la estructura global es aproximadamente mil veces más blanda que los robots de tubos concéntricos típicos, lo que reduce el riesgo de lesión si presiona contra las paredes vasculares.
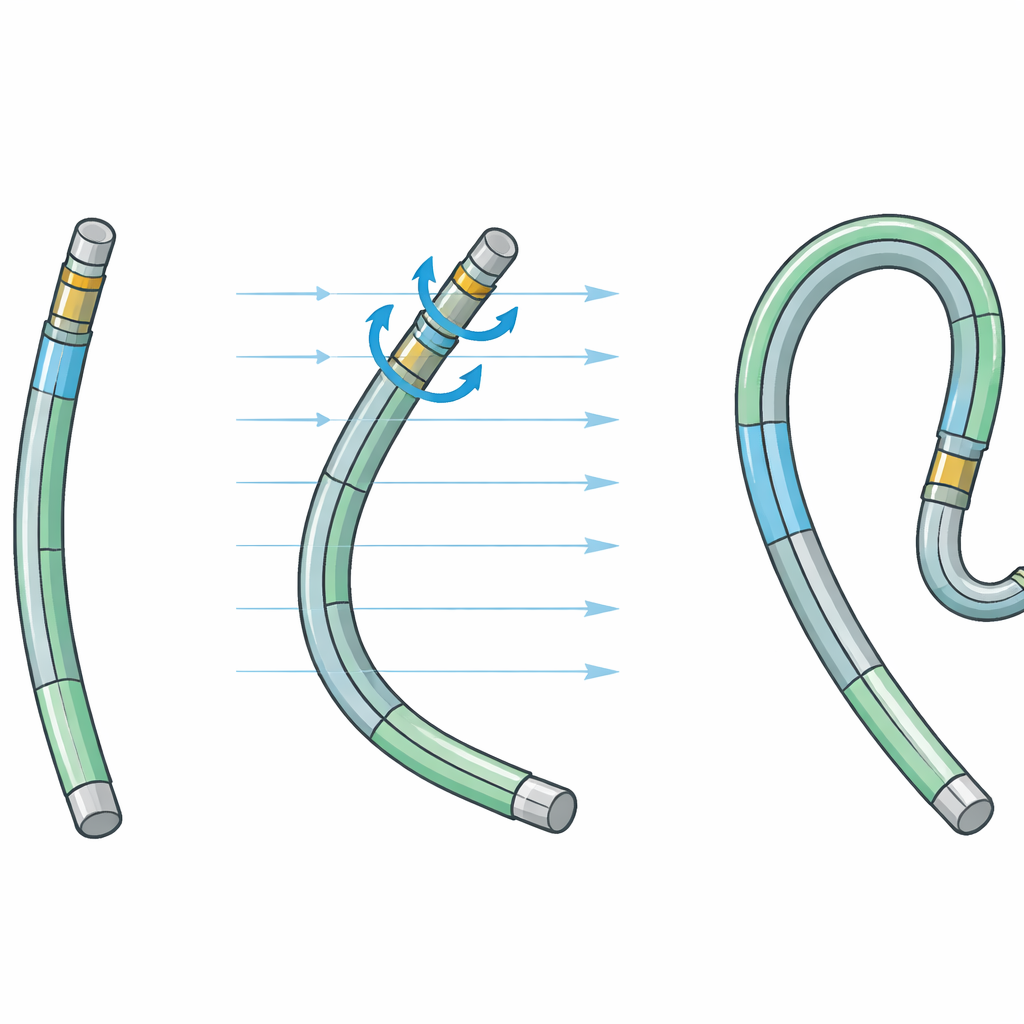
Cómo se dobla y curva el catéter blando
Las tres mangas trabajan en conjunto para crear una amplia gama de formas. La manga más externa lleva un conjunto de anillos que, bajo el campo de la RM, se dobla suavemente pero nunca más allá de aproximadamente un ángulo recto. La manga intermedia porta otro anillo en un ángulo distinto; al rotar y extender esta manga respecto a la externa se puede invertir la dirección de la curvatura, provocando que el catéter se curve sobre sí mismo o forme una S. Una manga interna delgada, rematada con un diminuto pasador metálico, puede extenderse en la dirección a la que apunta la estructura combinada, barriendo efectivamente un círculo completo de orientaciones posibles. Los investigadores desarrollaron modelos computacionales que equilibran las fuerzas magnéticas con la resistencia elástica de los tubos trenzados, lo que les permite predecir y ajustar estas formas y, al mismo tiempo, reducir la tendencia al colapso brusco.
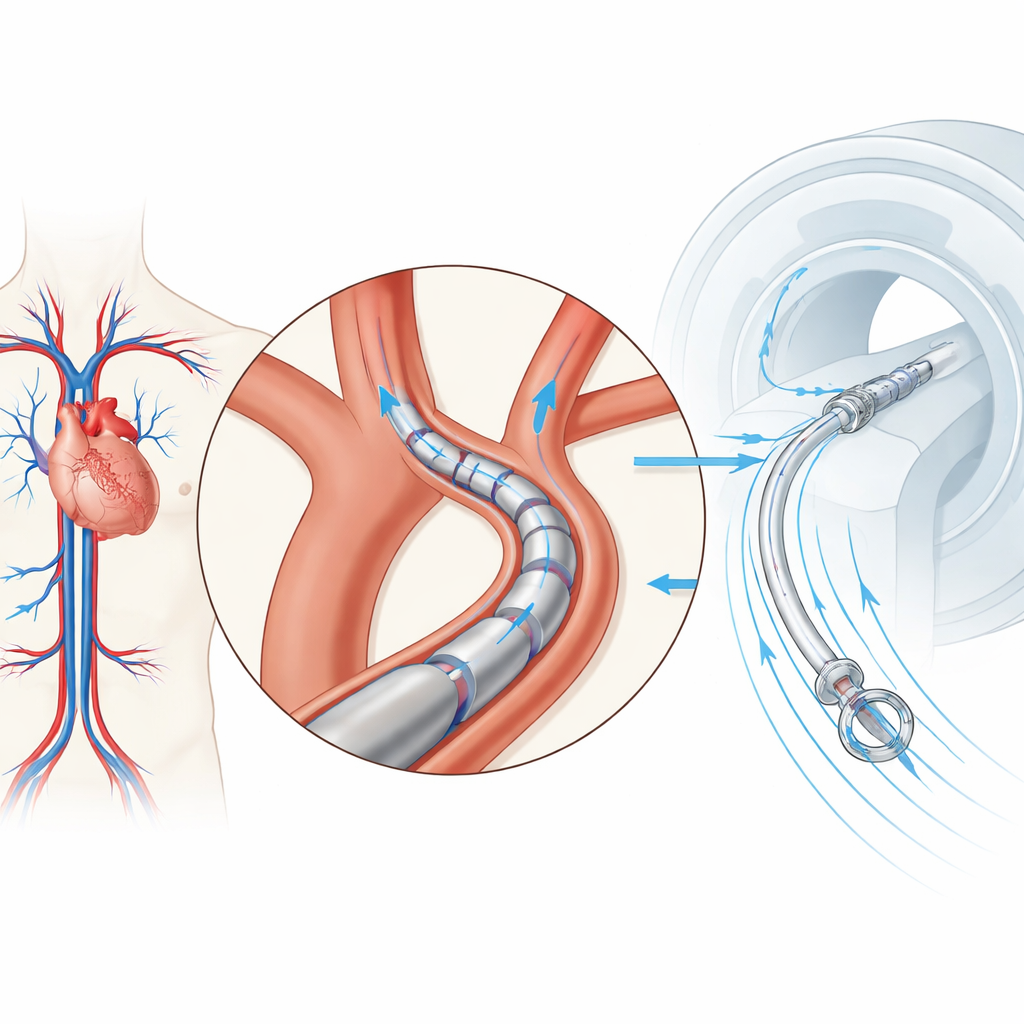
Pruebas dentro de un modelo de la aorta humana
Para demostrar que no es solo un juguete de laboratorio, el equipo guió el CoSMA a través de una réplica impresa en 3D del arco aórtico humano—la gran arteria curvada que sale del corazón y que pronto se ramifica en vasos que alimentan la cabeza y los brazos. Operando el dispositivo manualmente desde fuera del escáner de RM, un usuario sin experiencia logró dirigir el catéter desde un punto de entrada simulado en la pierna hacia cada una de las cinco ramas clave en menos de diez minutos. La RM proporcionó imágenes tridimensionales detalladas, lo que permitió a los investigadores reconstruir tanto la anatomía como la forma exacta del catéter mientras navegaba, a pesar de algunas zonas oscuras inevitables donde las pequeñas piezas metálicas perturbaban la señal. El prototipo, con un diámetro exterior de 4 milímetros, ya está dentro del rango de las herramientas clínicas, y los autores sostienen que una mayor miniaturización debería ser posible a medida que mejoren las técnicas de fabricación.
Pasos hacia una navegación más inteligente y segura
En la discusión, los autores subrayan que CoSMA es una prueba de concepto para una nueva clase de catéteres impulsados y visibles por RM. El dispositivo actual se controla a mano y las imágenes de RM se procesan fuera de línea, pero los mismos principios podrían sustentar sistemas futuros que interpreten automáticamente exploraciones rápidas de RM, reconstruyan en tiempo real la forma del catéter y ajusten los movimientos de las mangas en consecuencia. Plantean la necesidad de imágenes más rápidas, hardware de actuación automatizado y software de control más eficiente, así como componentes magnéticos más compactos y acabados con mayor cuidado. Si se superan estos retos de ingeniería, este enfoque podría posibilitar catéteres blandos y muy maniobrables que naveguen por vasos complejos con fuerza mínima, todo bajo una guía tridimensional libre de radiación—ofreciendo a pacientes y clínicos una forma más amable de alcanzar algunos de los destinos más difíciles del cuerpo.
Cita: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Palabras clave: Catéter guiado por RM, robótica blanda, intervención endovascular, actuación magnética, robot de tubos concéntricos