Clear Sky Science · de
Ein konzentrischer Röhrenkatheter für endoluminale Eingriffe, gesteuert und abgebildet mittels Magnetresonanztomographie
Sanftere Instrumente für empfindliche Herzprozeduren
Das Einführen von Instrumenten tief in die Blutgefäße ist ein Routinebestandteil der modernen Medizin, etwa beim Eröffnen verstopfter Arterien oder der Behandlung von Herzrhythmusstörungen. Dennoch sind heutige Katheter relativ steif und werden meist unter Röntgenbildgebung geführt, die sowohl Patienten als auch Personal Strahlen aussetzt und nur flache, schattenhafte Ansichten liefert. Dieser Artikel stellt eine neue Art von weichem, lenkbarem Katheter vor, der vom Magnetresonanztomographen (MRT) selbst gesteuert und angetrieben wird und auf sicherere, präzisere Eingriffe in einigen der empfindlichsten Körperpassagen abzielt.
Warum sich aktuelle Katheter schwer steuern lassen
Konventionelle Katheter werden von außen geschoben und gedreht, wobei die Geschicklichkeit des Operateurs und vormontierte Metalldrähte genutzt werden, um das richtige Gefäß zu erreichen. Ihre Steifigkeit, die die Kontrolle erleichtert, kann auch empfindliches Gewebe schädigen und gelegentlich zu Komplikationen während oder nach dem Eingriff führen. Fortgeschrittenere »Continuum«‑ oder »konzentrische Rohre«‑Roboter – aus mehreren voreingestellten, ineinander gesteckten Röhren gefertigt – können in viele Richtungen biegen, bestehen jedoch aus sehr steifen Legierungen. Diese Steifigkeit kann plötzliche Übergänge von einer Form in eine andere verursachen, ein schwer vorhersagbares Schnappverhalten, das im Körper riskant ist. Gleichzeitig erfolgt die Verfolgung dieser Geräte meist per Röntgen‑Fluoroskopie, die nur begrenzte dreidimensionale Informationen liefert und zusätzliche Strahlenbelastung bedeutet.
Das MRT als doppelte Energiequelle nutzen
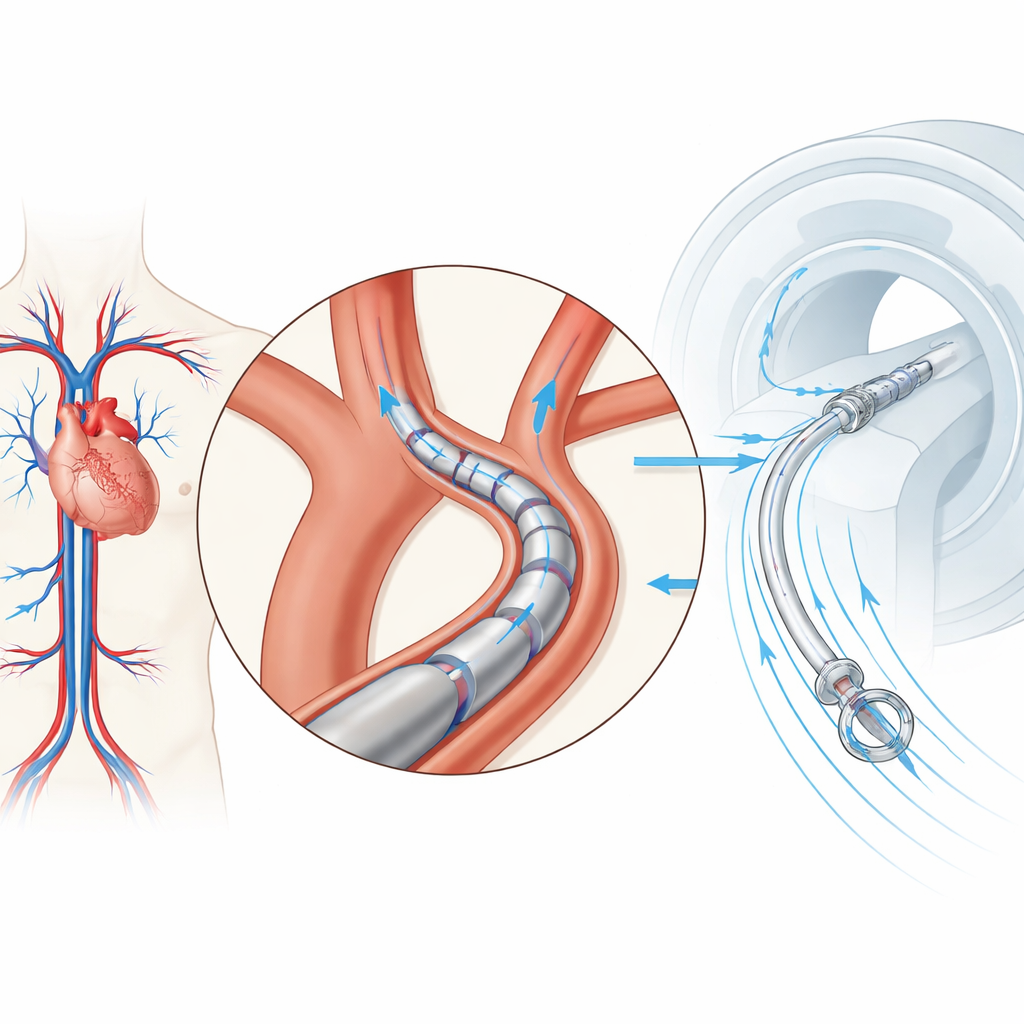
Die Autoren stellen ein Gerät namens Coaxial Sleeve Magnetic Actuator (CoSMA) vor, einen dreiteiligen Katheter, der von Grund auf für den Einsatz im MRT‑Scanner entwickelt wurde. Statt permanente Magnete oder Motoren in den Katheter einzubauen, nutzt CoSMA stillschweigend das starke, konstante Magnetfeld, das jeder MRT‑Scanner erzeugt. Kleine weiche Metallringe und Stifte an der Spitze jeder der drei konzentrischen Hüllen versuchen sich natürlicherweise, an dieses Feld auszurichten. Durch Schieben und Drehen der Hüllen von außerhalb des Scanners kann der Bediener die Spitze umformen und das MRT‑Feld als unsichtbare Energiquelle nutzen. Da das Material der Hüllen eher an geflochtenes Nylon als an federndes Metall erinnert, ist die Gesamtstruktur etwa tausendmal weicher als typische konzentrische Röhrenroboter, was das Risiko von Verletzungen beim Kontakt mit Gefäßwänden verringert.
Wie der weiche Katheter sich biegt und schlängelt
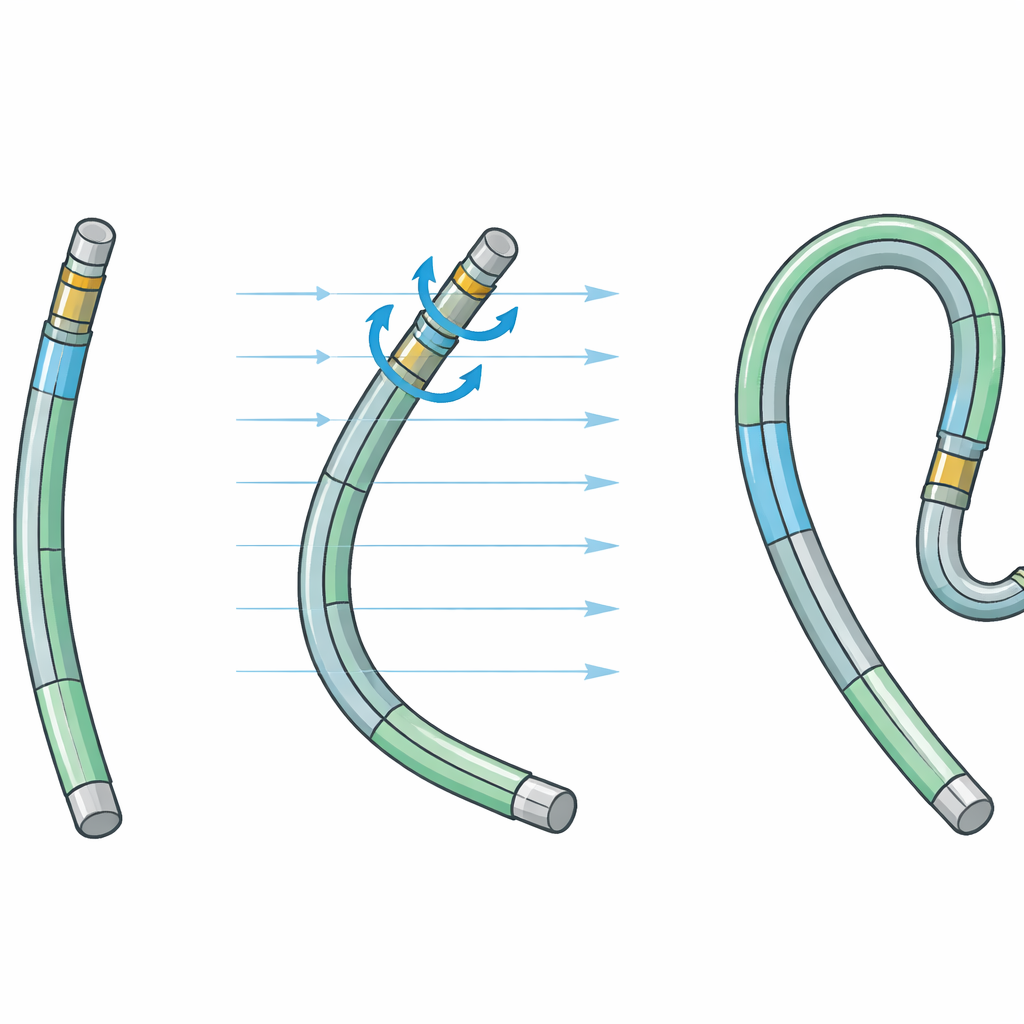
Die drei Hüllen arbeiten zusammen, um ein breites Spektrum an Formen zu erzeugen. Die äußerste Hülle trägt einen Ringsatz, der sich im MRT‑Feld glatt biegt, jedoch nie über etwa einen rechten Winkel hinaus. Die mittlere Hülle trägt einen weiteren Ring in einem anderen Winkel; durch Drehen und Herausziehen dieser Hülle relativ zur äußeren Hülle kann die Biegerichtung umgeschlagen werden, sodass sich der Katheter zurückkrümmt oder eine S‑förmige Kurve bildet. Eine dünne innere Hülle, an deren Spitze ein winziger Metallstift sitzt, kann sich dann in die vom Gesamtsystem bestimmte Richtung ausfahren und effektiv einen vollen Kreis möglicher Orientierungen abdecken. Die Forscher entwickelten Computermodelle, die die magnetischen Kräfte mit dem elastischen Widerstand der geflochtenen Rohre ausbalancieren, sodass sie diese Formen vorhersagen und abstimmen konnten und zugleich die Neigung zum plötzlichen Schnappverhalten vermindern.
Tests in einem Modell der menschlichen Aorta
Um zu zeigen, dass es sich nicht nur um ein Laborspielzeug handelt, lenkte das Team CoSMA durch ein 3D‑gedrucktes Kunststoffnachbild der menschlichen Aortenbögen – der großen gebogenen Arterie, die das Herz verlässt und sich rasch in Gefäße verzweigt, die Kopf und Arme versorgen. Ein unerfahrener Anwender konnte das Gerät manuell von außerhalb des MRT‑Scanners aus steuern und den Katheter in weniger als zehn Minuten von einem simulierten Eintrittspunkt am Bein in jeden der fünf wichtigen Äste führen. Das MRT lieferte detaillierte dreidimensionale Bilder, die es den Forschern erlaubten, sowohl die Anatomie als auch die genaue Form des Katheters während der Navigation zu rekonstruieren, trotz unvermeidlicher dunkler Bereiche, in denen die winzigen Metallteile das Signal störten. Der Prototyp mit 4 Millimeter Außendurchmesser liegt bereits im Bereich klinischer Instrumente, und die Autoren argumentieren, dass eine weitere Miniaturisierung mit verbesserten Fertigungstechniken möglich sein sollte.
Schritte hin zu intelligenterer, sichererer Navigation
In ihrer Diskussion betonen die Autoren, dass CoSMA ein Machbarkeitsnachweis für eine neue Klasse von MRT‑getriebenen, MRT‑sichtbaren Kathetern ist. Das aktuelle Gerät wird von Hand gesteuert und die MRT‑Bilder werden offline verarbeitet, doch dieselben Prinzipien könnten künftige Systeme unterstützen, die schnelle MRT‑Scans automatisch interpretieren, die Form des Katheters in Echtzeit rekonstruieren und die Hüllenbewegungen entsprechend anpassen. Sie skizzieren den Bedarf an schnellerer Bildgebung, automatisierter Aktuator‑Hardware und effizienterer Steuerungssoftware sowie kompakteren und sorgfältig verarbeiteten magnetischen Komponenten. Werden diese ingenieurtechnischen Herausforderungen gemeistert, könnte dieser Ansatz weiche, hochmanövrierfähige Katheter ermöglichen, die komplexe Blutgefäße mit minimaler Kraft durchqueren — alles unter strahlungsfreier, dreidimensionaler Führung und damit eine sanftere Möglichkeit für Patienten und Behandler bieten, einige der schwierigsten Ziele im Körper zu erreichen.
Zitation: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Schlüsselwörter: MR‑gesteuerter Katheter, weiche Robotik, endovaskulärer Eingriff, magnetische Aktuation, konzentrischer Röhrenroboter