Clear Sky Science · en
A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging
Gentler Tools for Delicate Heart Procedures
Threading instruments deep into the body’s blood vessels is a routine part of modern medicine, used in everything from opening clogged arteries to treating irregular heartbeats. Yet today’s catheters are relatively stiff and are usually guided using X‑ray imaging, which exposes both patients and clinicians to radiation and gives only flat, shadowy views. This paper presents a new kind of soft, steerable catheter that is guided and powered by a magnetic resonance imaging (MRI) scanner itself, pointing toward safer, more precise procedures inside some of the body’s most fragile passageways.
Why Current Catheters Are Hard to Steer
Conventional catheters are pushed and twisted from outside the body, relying on the operator’s skill and on pre-shaped metal wires to reach the right vessel. Their stiffness, helpful for control, can also damage delicate tissue and occasionally leads to complications during or after the procedure. More advanced “continuum” or “concentric tube” robots—made of multiple pre-curved tubes nested inside one another—can bend in many directions, but they are built from very stiff alloys. That stiffness can cause sudden jumps from one shape to another, a snap-through behavior that is hard to predict and risky inside the body. At the same time, tracking these devices is usually done with X‑ray fluoroscopy, which gives limited three-dimensional information and adds radiation dose.
Letting the MRI Scanner Do Double Duty
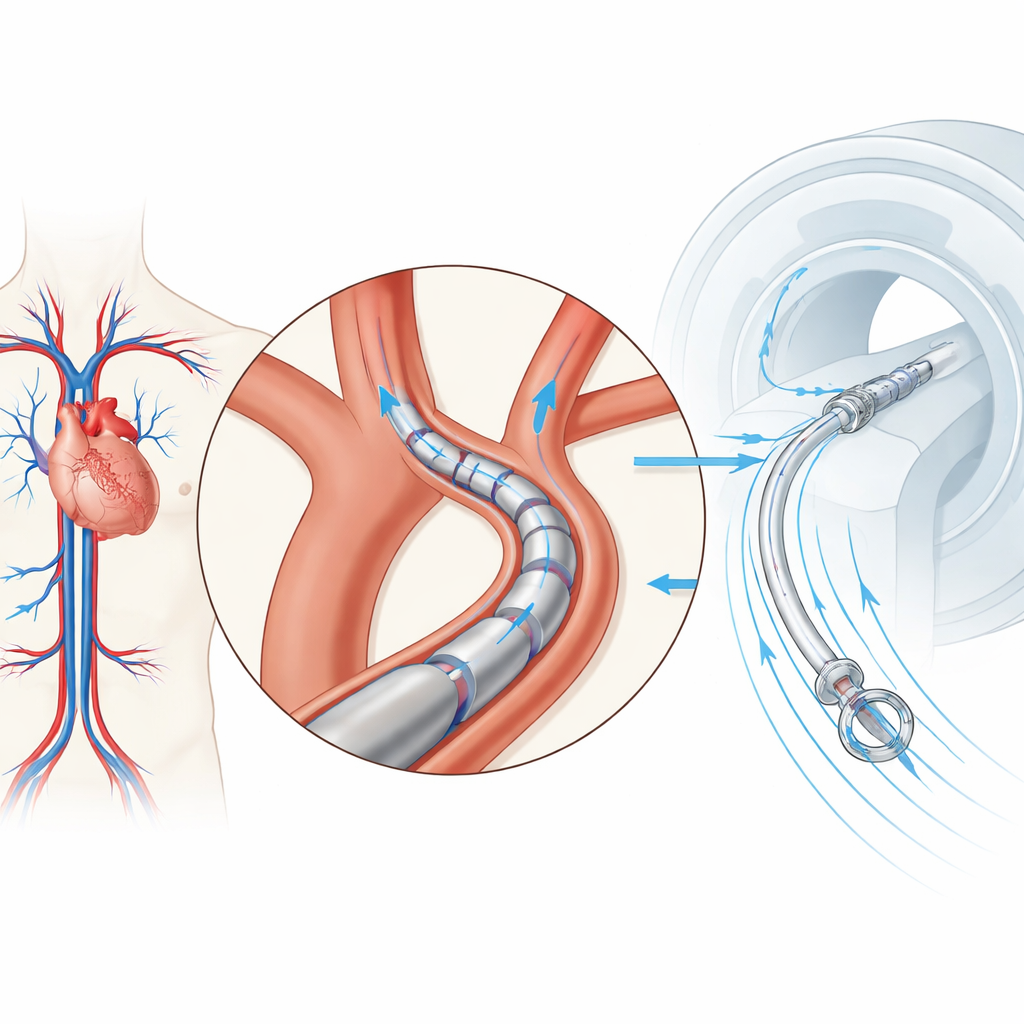
The authors introduce a device called the Coaxial Sleeve Magnetic Actuator (CoSMA), a three-part catheter designed from the ground up to work inside an MRI scanner. Rather than packing permanent magnets or motors into the catheter, CoSMA quietly taps into the powerful, steady magnetic field that every MRI machine generates. Tiny soft-metal rings and pins at the tip of each of three concentric sleeves naturally try to align themselves with this field. By sliding and rotating the sleeves from outside the scanner, the operator can reshape the tip, using the MRI’s field as an invisible energy source. Because the material of the sleeves is more like braided nylon than springy metal, the overall structure is roughly a thousand times softer than typical concentric tube robots, which lowers the risk of injury if it presses against vessel walls.
How the Soft Catheter Bends and Loops
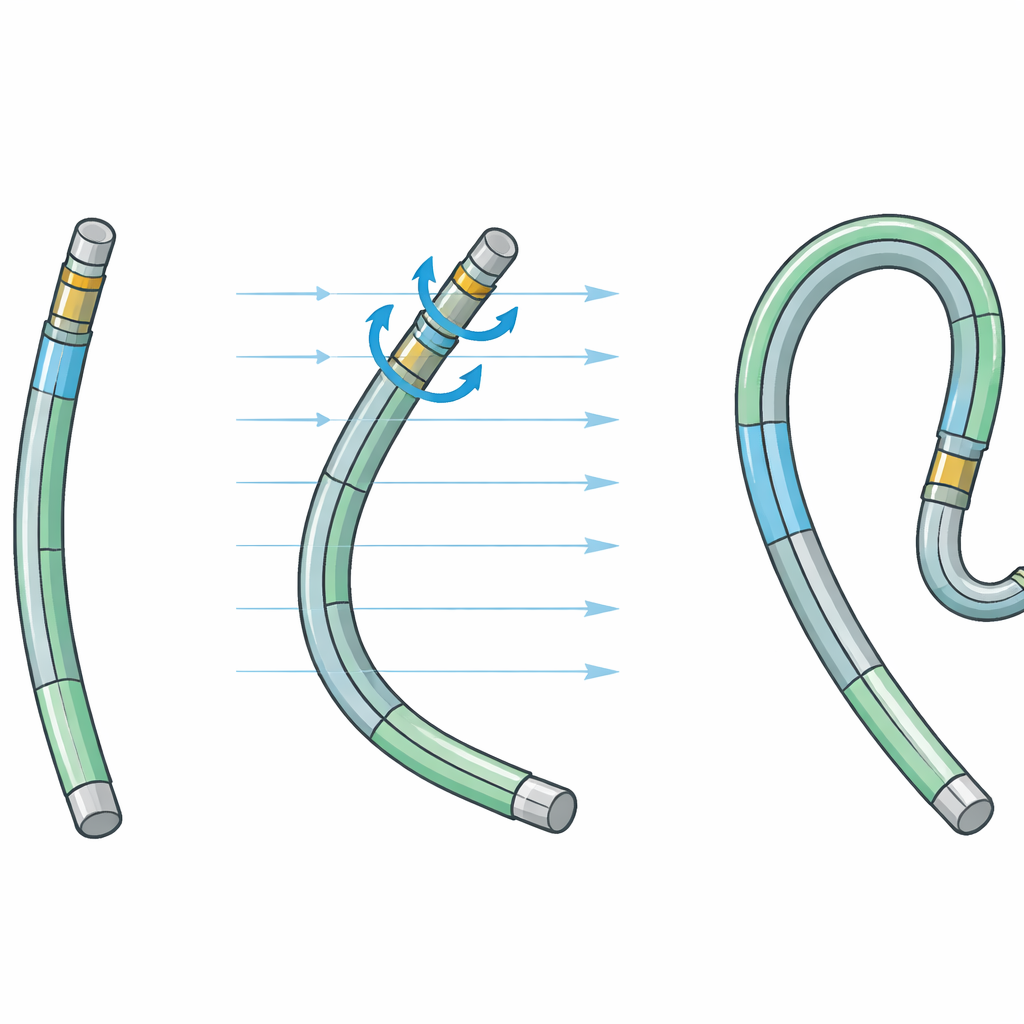
The three sleeves work together to create a wide range of shapes. The outermost sleeve carries a ring set so that, under the MRI field, it bends smoothly but never beyond about a right angle. The middle sleeve carries another ring at a different angle; rotating and extending this sleeve relative to the outer one can flip the direction of bending, causing the catheter to curl back on itself or form an S‑shaped curve. A thin inner sleeve, tipped with a tiny metal pin, can then extend into whichever direction the combined structure points, effectively sweeping through a full circle of possible orientations. The researchers developed computer models that balance the magnetic forces with the elastic resistance of the braided tubes, allowing them to predict and tune these shapes while also reducing the tendency for sudden snap-through.
Testing Inside a Model of the Human Aorta
To show that this is more than a laboratory toy, the team steered the CoSMA through a 3D‑printed plastic replica of the human aortic arch—the large curved artery leaving the heart, which quickly branches into vessels that feed the head and arms. Operating the device manually from outside the MRI scanner, an inexperienced user was able to guide the catheter from a simulated leg entry point into each of the five key branches in under ten minutes. The MRI provided detailed three‑dimensional images, allowing the researchers to reconstruct both the anatomy and the exact shape of the catheter as it navigated, despite some unavoidable dark spots where the tiny metal parts disturbed the signal. The prototype’s 4‑millimeter outer diameter is already within the range of clinical tools, and the authors argue that further miniaturization should be possible as fabrication techniques improve.
Steps Toward Smarter, Safer Navigation
In their discussion, the authors emphasize that CoSMA is a proof of concept for a new class of MRI‑driven, MRI‑visible catheters. The current device is controlled by hand, and the MRI images are processed offline, but the same principles could support future systems that automatically interpret fast MRI scans, reconstruct the catheter’s shape in real time, and adjust the sleeve motions accordingly. They outline the need for faster imaging, automated actuation hardware, and more efficient control software, as well as more compact and carefully finished magnetic components. If these engineering challenges are met, this approach could enable soft, highly maneuverable catheters that navigate complex blood vessels with minimal force, all under radiation‑free, three‑dimensional guidance—offering patients and clinicians a gentler way to reach some of the body’s most difficult destinations.
Citation: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Keywords: MRI-guided catheter, soft robotics, endovascular intervention, magnetic actuation, concentric tube robot