Clear Sky Science · pl
Stent koncentryczny do interwencji endoluminalnych, kierowany i obrazowany za pomocą rezonansu magnetycznego
Delikatniejsze narzędzia do precyzyjnych zabiegów serca
Wprowadzanie instrumentów głęboko w naczynia krwionośne jest rutynową częścią współczesnej medycyny — stosuje się to od udrażniania zatkanych tętnic po leczenie zaburzeń rytmu serca. Dziś stosowane cewniki są jednak stosunkowo sztywne i zwykle prowadzone przy użyciu obrazowania rentgenowskiego, które naraża pacjentów i personel na promieniowanie oraz daje jedynie płaskie, cieniowe obrazy. W artykule przedstawiono nowy rodzaj miękkiego, sterowalnego cewnika, który jest kierowany i napędzany przez rezonans magnetyczny (MRI), co wskazuje drogę ku bezpieczniejszym i dokładniejszym zabiegom w niektórych z najdelikatniejszych przejść w ciele.
Dlaczego obecne cewniki trudno sterować
Konwencjonalne cewniki są popychane i skręcane z zewnątrz ciała, polegając na umiejętnościach operatora i na wstępnie ukształtowanych metalowych drutach, aby dotrzeć do właściwego naczynia. Ich sztywność, przydatna do kontroli, może też uszkadzać delikatne tkanki i czasem prowadzić do powikłań w trakcie lub po zabiegu. Bardziej zaawansowane roboty „ciągłe” lub „z koncentrycznych rur” — zbudowane z kilku uprzednio zakrzywionych rur osadzonych jedna w drugiej — potrafią zginać się w wielu kierunkach, lecz wykonane są z bardzo sztywnych stopów. Ta sztywność może powodować nagłe przejścia z jednej formy w inną, zachowanie typu snap-through, które jest trudne do przewidzenia i ryzykowne wewnątrz organizmu. Jednocześnie śledzenie tych urządzeń zazwyczaj odbywa się za pomocą fluoroskopii rentgenowskiej, która dostarcza ograniczonych informacji trójwymiarowych i zwiększa dawkę promieniowania.
Wykorzystanie skanera MRI do podwójnej roli
Autorzy przedstawiają urządzenie nazwane Coaxial Sleeve Magnetic Actuator (CoSMA), trójczęściowy cewnik zaprojektowany od podstaw do pracy wewnątrz skanera MRI. Zamiast umieszczać w cewniku trwałe magnesy czy silniki, CoSMA korzysta z potężnego, stałego pola magnetycznego generowanego przez każde urządzenie MRI. Maleńkie pierścienie i bolce z miękkiego metalu na końcu każdej z trzech koncentrycznych osłon naturalnie starają się wyrównać z tym polem. Przesuwając i obracając osłony z zewnątrz skanera, operator może zmieniać kształt końcówki, używając pola MRI jako niewidzialnego źródła energii. Ponieważ materia osłon przypomina bardziej pleciony nylon niż sprężysty metal, cała konstrukcja jest około tysiąc razy bardziej miękka niż typowe roboty z koncentrycznych rur, co zmniejsza ryzyko uszkodzenia przy kontakcie ze ścianami naczyń.
Jak miękki cewnik się zgina i formuje pętle
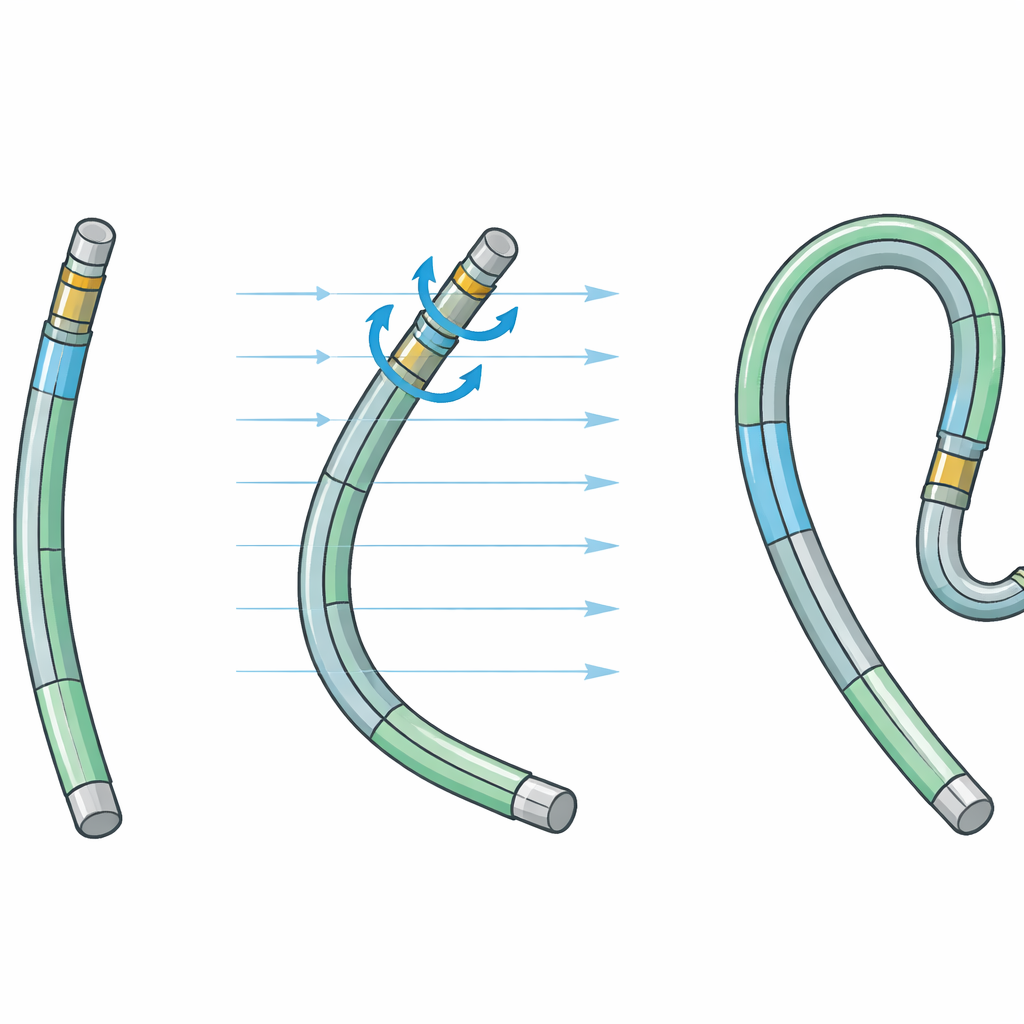
Trzy osłony współpracują, tworząc szeroką gamę kształtów. Najbardziej zewnętrzna osłona niesie zestaw pierścieni tak ukształtowanych, że pod wpływem pola MRI wygina się gładko, ale nigdy nie przekracza mniej więcej kąta prostego. Środkowa osłona ma inny pierścień ustawiony pod odmiennym kątem; obracanie i wysuwanie tej osłony względem zewnętrznej może odwrócić kierunek zginania, powodując zawinięcie cewnika wstecz na siebie lub utworzenie krzywej w kształcie litery S. Cienka wewnętrzna osłona zakończona malutkim metalowym bolcem może następnie wysunąć się w dowolnym kierunku, w którym wskazuje połączona struktura, skutecznie zamiatając pełne koło możliwych orientacji. Badacze opracowali modele komputerowe równoważące siły magnetyczne z elastycznym oporem plecionych rur, co pozwala przewidywać i dostrajać te kształty, a także zmniejszać skłonność do nagłych snap-through.
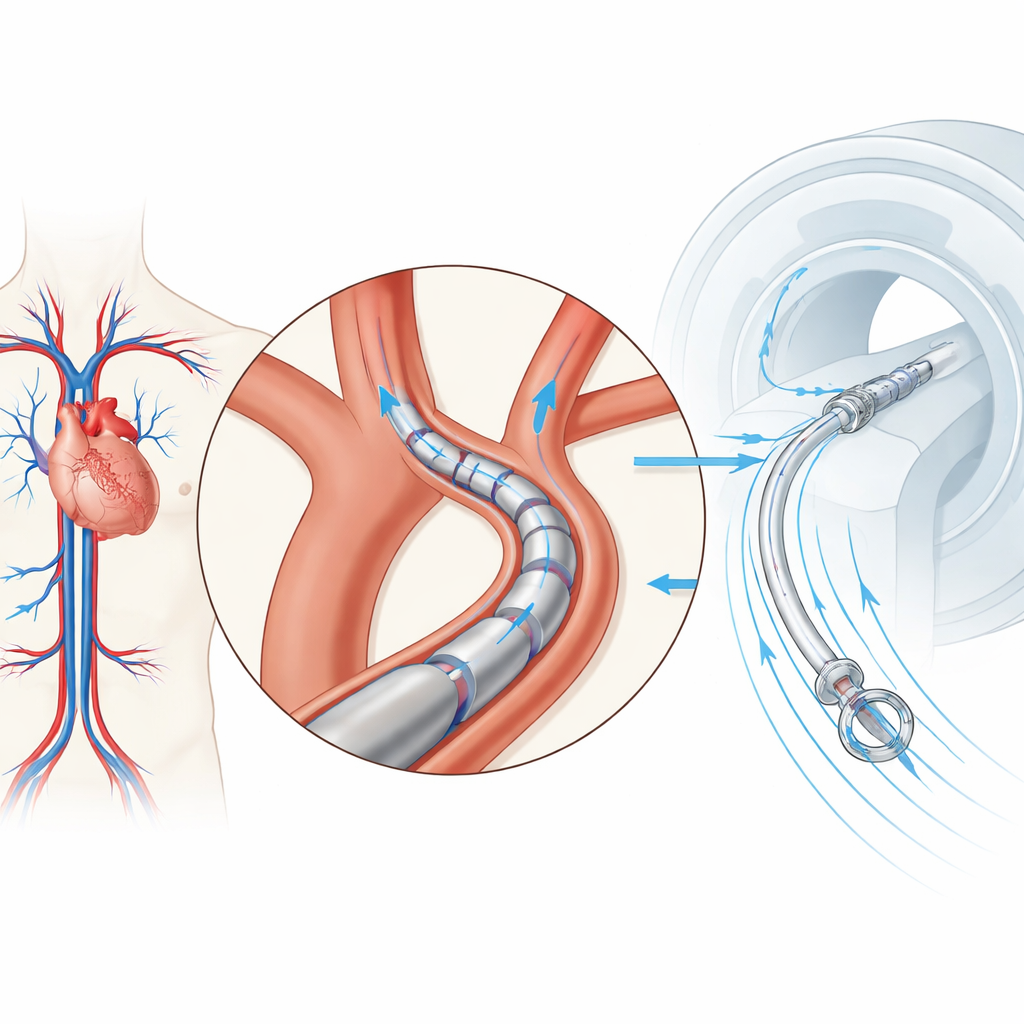
Testy w modelu łuku aorty człowieka
Aby wykazać, że to więcej niż laboratoryjna zabawka, zespół przeprowadził sterowanie CoSMA przez wydrukowany w 3D plastikowy model łuku aorty człowieka — dużej zakrzywionej tętnicy wychodzącej z serca, która szybko rozgałęzia się na naczynia zaopatrujące głowę i ramiona. Obsługując urządzenie ręcznie spoza skanera MRI, niedoświadczony użytkownik był w stanie poprowadzić cewnik z symulowanego punktu wejścia w nodze do każdej z pięciu kluczowych gałęzi w czasie krótszym niż dziesięć minut. MRI dostarczało szczegółowych trójwymiarowych obrazów, pozwalając badaczom odtworzyć zarówno anatomię, jak i dokładny kształt cewnika podczas nawigacji, pomimo nieuniknionych ciemnych plam tam, gdzie drobne metalowe części zakłócały sygnał. Prototyp o zewnętrznej średnicy 4 milimetrów już mieści się w zakresie narzędzi klinicznych, a autorzy twierdzą, że dalszą miniaturyzację powinno być możliwe w miarę poprawy technik wytwarzania.
Kroki w kierunku inteligentniejszej i bezpieczniejszej nawigacji
W dyskusji autorzy podkreślają, że CoSMA jest dowodem koncepcji nowej klasy cewników napędzanych i widocznych w MRI. Obecne urządzenie jest kontrolowane ręcznie, a obrazy MRI są przetwarzane offline, lecz te same zasady mogłyby wspierać przyszłe systemy automatycznie interpretujące szybkie skany MRI, odtwarzające kształt cewnika w czasie rzeczywistym i odpowiednio korygujące ruchy osłon. Wyróżniają potrzebę szybszego obrazowania, zautomatyzowanego sprzętu aktuacyjnego i bardziej wydajnego oprogramowania sterującego, a także bardziej zwartego i starannie wykończonego osprzętu magnetycznego. Jeśli te wyzwania inżynieryjne zostaną rozwiązane, podejście to może umożliwić miękkie, wysoce manewrowalne cewniki, które przemieszczają się po złożonych naczyniach krwionośnych przy minimalnej sile, wszystko pod bezpromieniowym, trójwymiarowym nadzorem — oferując pacjentom i klinicystom delikatniejszy sposób dotarcia do jednych z najtrudniejszych celów w ciele.
Cytowanie: Lloyd, P., Murasovs, N., May, Y.L. et al. A concentric tube catheter for endoluminal interventions, steered and imaged via magnetic resonance imaging. Commun Eng 5, 74 (2026). https://doi.org/10.1038/s44172-026-00636-1
Słowa kluczowe: Kateter prowadzony za pomocą MRI, miękka robotyka, interwencja endowaskularna, magnetyczne aktywowanie, robot z koncentrycznych rur