Clear Sky Science · zh
通过基于教学—学习的优化方法实现具可变长度连续体机器人避障的逆运动学并进行实验验证
像象鼻一样运动的机器人
想象一只机械臂能够像大象的鼻子那样弯曲、扭转并在瓦砾间穿行,灵巧地绕过树枝。这样的“连续体机器人”是为在狭窄或危险环境中工作而设计的柔性机器,从倒塌的建筑到人体内部均可适用。本文提出了一种新的方法,可以在机器人体长变化并绕开障碍物的情况下精确地操控它们,使这种未来技术更接近实际应用。
为什么柔性机器人难以控制
不同于汽车工厂中那种刚性关节机械臂,连续体机器人以可弯曲的骨干为核心,骨干内穿有缆线或管道。它们可以在多个方向上平滑弯曲,甚至伸长或收缩,从而具备很大的触及范围和机动性。但这种柔性也带来挑战:在拉动缆线时,预测机器人末端如何运动十分复杂,而从期望的末端位置反推缆线与形态设置更为困难。通常存在多种方式可到达同一点,且运动高度非线性,使得传统的逐步解析公式难以适用。
将运动规划转化为智能搜索
为了解决这一难题,作者将机器人的运动规划视为一个搜索问题。首先采用一种常用的几何近似:将机器人每个段视为像圆弧一样平滑弯曲。基于该模型,任意一组弯曲角度、方向和段长的选择都会预测出机器人末端的位置。关键思路是让计算机在这些选择上进行搜索,以找到使末端尽可能接近期望空间点的组合,同时受限于各段可弯曲或可伸长的物理极限。
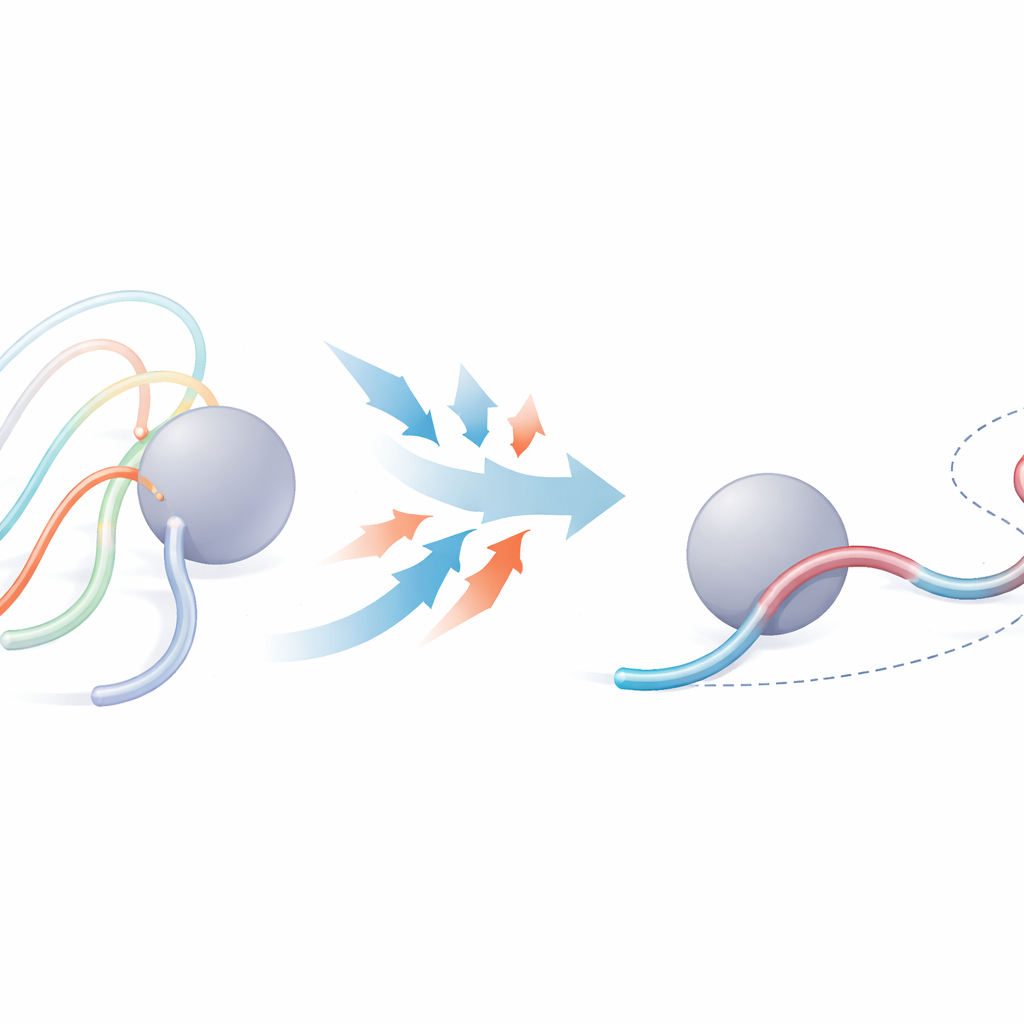
从虚拟课堂中学习
该方法的核心搜索引擎称为基于教学—学习的优化(teaching–learning-based optimization)。它模拟了一个“学生”组成的课堂,每个学生代表一种候选的机器人弯曲和伸缩方式。在每一轮中,表现最好的学生充当“教师”,推动其他学生向更优解靠拢;同时学生之间成对交流,互相借鉴差异。经过多轮迭代,这个虚拟课堂会收敛到一个能非常接近目标点的配置。还有一个简单技巧可以使点到点的运动平滑:当机器人沿路径移动时,把某一点得到的最佳解作为下一点的初始猜测,从而避免形态上的突变。
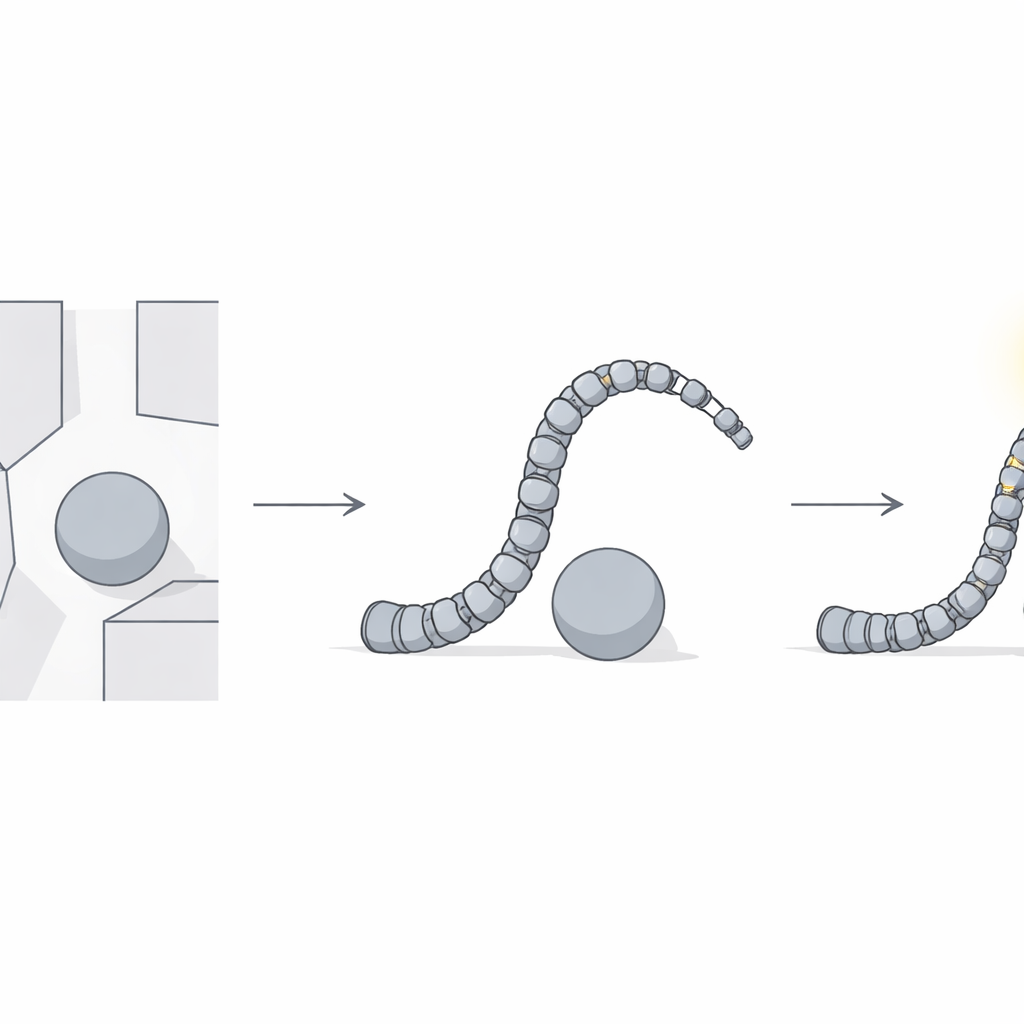
与障碍保持安全距离
在复杂环境中工作意味着机器人不能擦碰附近物体。作者没有只检查机器人中心线,而是把每段建模为具有真实半径的加厚“胶囊”形状,并将障碍视为具有自身尺寸的实体形状。在搜索过程中,任何会与障碍发生碰撞的候选形态都会被严厉惩罚,使其极不可能被选为优解。在计算机测试中,机器人成功沿直线和圆弧路径运动,并在绕过固定障碍时优雅地弯曲,同时保持适当的安全裕度。
将方法付诸测试
团队将这种课堂启发式搜索与工程中常用的另外三种流行优化方法进行了比较。在大量重复试验中,他们的方法始终找到高精度解,而且不需要任何手工调节的控制参数——这是竞争方法所依赖的。他们还将该技术推广到具有三段可弯曲单元的更复杂机器人,表明随着设计能力的提升该方法具有良好的扩展性。最后,他们在一台由气压驱动、类象鼻的真实机器人上进行测试。利用传感器跟踪的机器人运动数据,他们在离线条件下运行算法来预测内部缆线应如何移动,发现预测的缆线长度与实际测量值高度吻合,相差仅数毫米。
这对未来机器人的意义
通俗地说,研究表明柔性、类象鼻机器人在需要伸展、弯曲并躲避障碍的情况下,也能像刚性工业臂那样近乎可靠地被引导。通过将控制问题转化为有指导的搜索并在目标函数中直接纳入安全裕度,作者提供了一种在仿真和硬件上均可行的实用方案。这为未来能够在拥挤环境中安全穿行的机器人奠定了基础——无论是机器内部、灾区,还是人体内部——同时仍保持执行高要求任务所需的精度。
引用: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
关键词: 连续体机器人, 软体机器人, 避障, 运动规划, 优化算法