Clear Sky Science · ar
العكس الحركي الواعي بالعقبات لروبوتات الاستمرار ذات الطول المتغير عبر تحسين مستوحى من التدريس والتعلّم مع تحقق تجريبي
روبوتات تتحرك مثل خراطيم الأفيال
تخيّل ذراعًا روبوتية يمكنها أن تلتف وتلتوي وتتزحزح خلال الأنقاض كما ينسج خرطوم الفيل بين فروع الشجر. هذه "الروبوتات المستمرة" هي آلات ناعمة ومرنة مصممة للعمل في أماكن ضيقة أو خطرة، من المباني المهدمة إلى داخل جسم الإنسان. يقدم هذا البحث طريقة جديدة لتوجيه هذه الروبوتات بدقة، حتى مع تغير طول جسدها وهي تتعرج بأمان حول العقبات، مما يقرب هذه التقنية المستقبلية من الاستخدام العملي.
لماذا من الصعب التحكم في الروبوتات المرنة
على عكس الأذرع الجامدة والمفصلية التي قد تراها في مصنعات السيارات، تُبنى روبوتات الاستمرار حول هياكل عظمية قابلة للانحناء مُدخلة بها كوابِل أو أنابيب. يمكنها الانحناء بسلاسة في اتجاهات متعددة وحتى التمدّد أو الانكماش، مما يمنحها مدىً ومرونة كبيرة. لكن هذه المرونة تأتي بتكلفة: فالتنبؤ بكيفية تحرك طرف الروبوت عندما تُشَدّ كوابله أمر معقّد، والعمل بالعكس من موقع طرف مرغوب إلى إعدادات الكابلات والشكل الملائم أصعب بعد. غالبًا ما توجد طرق عديدة ليصل الروبوت إلى نفس النقطة، وحركته غير خطية بشدّة، مما يصعّب تطبيق الصيغ التقليدية خطوة بخطوة.
تحويل تخطيط الحركة إلى بحث ذكي
لمعالجة هذا التحدي، يعامل المؤلفون تخطيط حركة الروبوت كمشكلة بحث. يعتمدون أولًا تقريبًا هندسيًا مستخدمًا على نطاق واسع حيث ينحني كل قسم من الروبوت على شكل قوس دائري سلس. مع هذا النموذج، أي اختيار محدد لزوايا الانحناء والاتجاهات وطول الأقسام يؤدي إلى موضع متوقَّع لطرف الروبوت. الفكرة الأساسية هي السماح لبرنامج الحاسوب بالبحث عبر هذه الاختيارات لإيجاد التوليفة التي تجعل الطرف يصل بأقرب ما يمكن إلى نقطة مرغوبة في الفراغ، مع مراعاة القيود الفيزيائية على مقدار ما يمكن أن ينحني أو يمتد كل قسم.
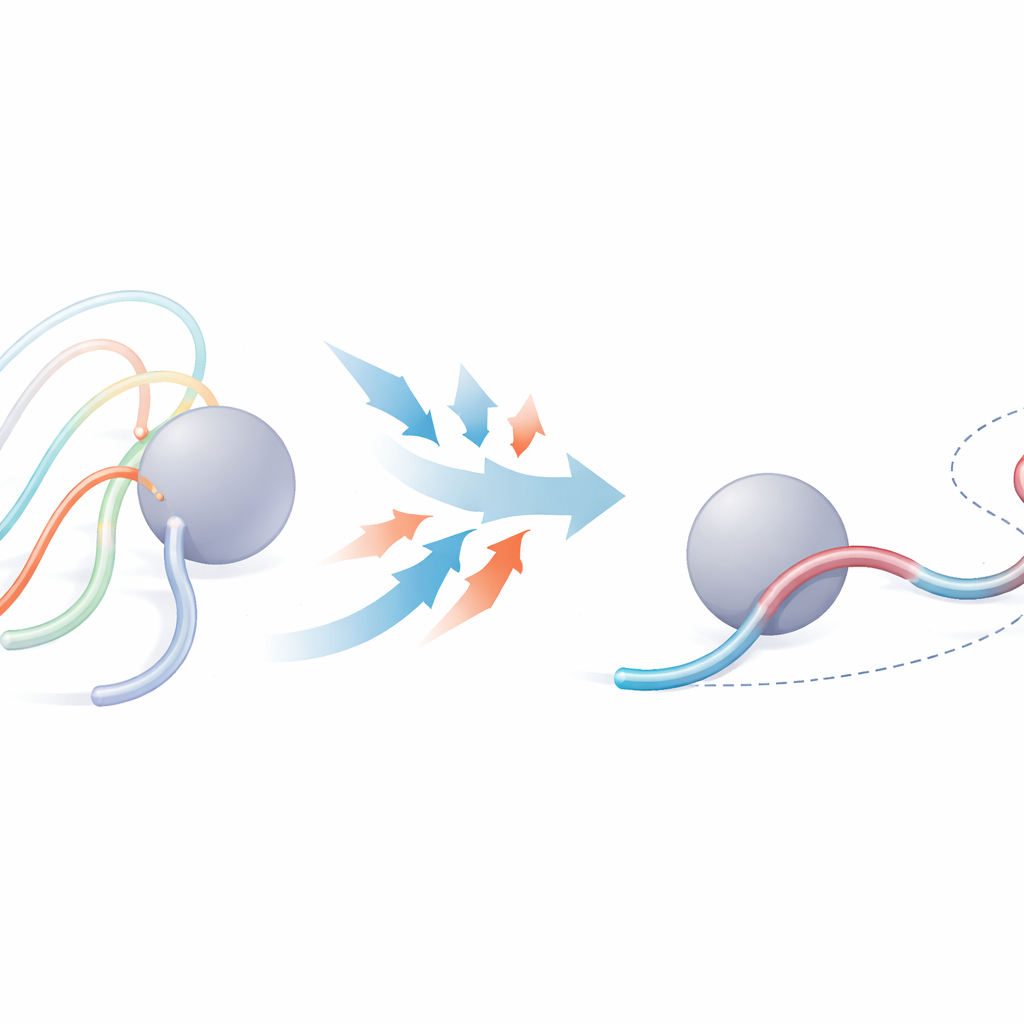
التعلّم من فصل افتراضي
محرك البحث في قلب هذه الطريقة يُسمى تحسينًا مستوحى من التدريس والتعلّم. يتخيل فصلًا دراسيًا من "الطلاب"، يمثل كل منهم اقتراحًا مرشحًا لكيفية انثناء الروبوت وتمددّه. في كل جولة، يعمل أفضل طالب كـ"معلم"، موجّهًا الآخرين نحو أداء أفضل، بينما تتعلم أزواج الطلاب أيضًا من اختلافاتهم. عبر جولات متعددة، يتقارب هذا الصف الافتراضي نحو تكوين يحقق الهدف بدقة عالية. خدعة بسيطة تجعل الحركة من نقطة إلى أخرى سلسلة: عندما يتحرك الروبوت على طول مسار، يُعاد استخدام أفضل حل وُجد لنقطة سابقة كحدس ابتدائي للنقطة التالية، مما يساعد على تجنّب القفزات المفاجئة في الشكل.
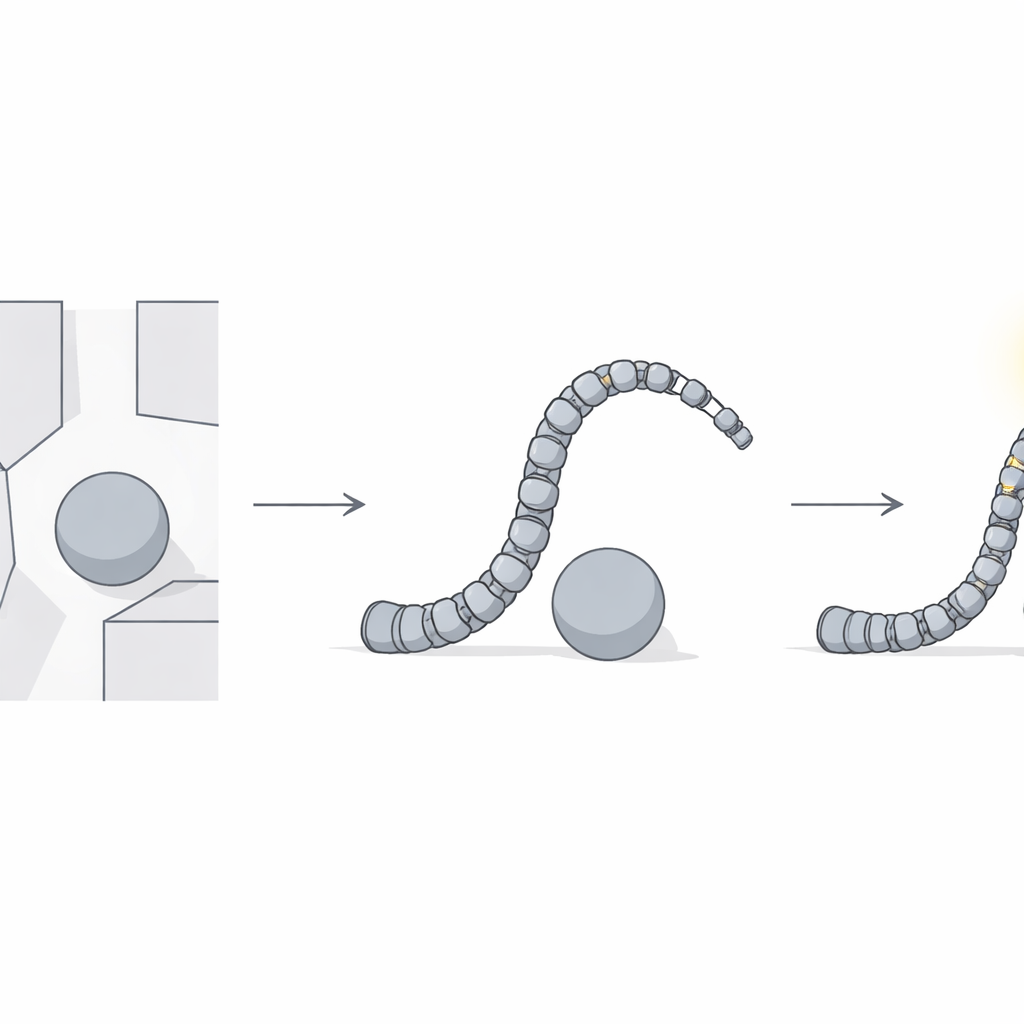
الحفاظ على مسافة آمنة من العقبات
العمل في مساحات مزدحمة يعني أنه يجب ألا يفرك الروبوت بالأجسام القريبة. بدلًا من فحص خط الوسط لجسم الروبوت فقط، يقوم المؤلفون بنمذجة كل قسم كـ"كبسولة" سميكة لها نصف قطر حقيقي، ويتعاملون مع العقبات كشَكليات صلبة لها أحجامها الخاصة. أثناء البحث، يُعاقَب أي شكل مرشح قد يصطدم بعقبة بشدّة، مما يجعل احتمالية اختياره كحل جيد ضئيلة جدًا. في الاختبارات الحاسوبية، تابع الروبوت بنجاح مسارات مستقيمة ودائرية مع الانحناء حول عائق ثابت برشاقة، بينما حافظ على هامش أمان مناسب.
وضع الطريقة على المحك
قارن الفريق بحثهم المستوحى من الفصل مع ثلاث طرق تحسين شهيرة أخرى تُستخدم غالبًا في الهندسة. عبر تجارب متكررة عديدة، وجدت طريقتهم باستمرار حلولًا دقيقة للغاية دون حاجة إلى أي إعدادات يدوية مضبوطة بعناية، وهو ما تتطلبه الطرق المنافسة. دفعوا أيضًا التقنية لتطبيقها على روبوتات أكثر تعقيدًا بثلاثة أقسام مرنة، مبيّنين أنها قابلة للتوسع مع زيادة قدرات التصميم. أخيرًا، اختبروا الطريقة على روبوت حقيقي شبيه بالخرطوم يُشغَّل بالضغط الهوائي. باستخدام قياسات من حسّاسات تابعت حركة الروبوت، شغّلوا خوارزميتهم خارج الوقت الحقيقي للتنبؤ بكيفية تحرك الكابلات الداخلية، ووجدوا أن الأطوال المتنبأ بها تطابقت عن كثب مع المقاسة، بفارق بضع مليمترات.
ماذا يعني هذا لروبوتات المستقبل
بعبارات بسيطة، تُظهر الدراسة أن روبوتًا مرنًا شبيهًا بالخرطوم يمكن توجيهه تقريبًا بنفس درجة الاعتمادية التي تُوجَّه بها ذراع صناعية صلبة، حتى عندما يتعين عليه التمدّد والالتفاف وتجنّب العقبات على طول الطريق. من خلال تحويل مشكلة التوجيه إلى بحث موجه ودمج هوامش الأمان مباشرة في الهدف، يوفّر المؤلفون وصفة عملية تعمل في كل من المحاكاة والمعدات الحقيقية. هذا يمهد الطريق لروبوتات مستقبلية يمكنها الزحف بأمان عبر بيئات مزدحمة—داخل الآلات، ومناطق الكوارث، أو حتى داخل جسم الإنسان—مع الحفاظ على الدقة التي تتطلبها المهام المتطلّبة.
الاستشهاد: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
الكلمات المفتاحية: روبوتات الاستمرار, الروبوتات اللينة, تجنّب العقبات, تخطيط الحركة, خوارزميات التحسين