Clear Sky Science · tr
Değişken uzunluklu kontinüum robotların engel-donanımlı ters kinematiği: öğretme–öğrenme tabanlı optimizasyon ile deneysel doğrulama
Fillerin Hortumları Gibi Hareket Eden Robotlar
Bir robot kolun, bir filin hortumunun ağaç dalları arasından kıvrılarak ve bükülerek geçtiği biçimde molozların arasından bükülüp geçebildiğini hayal edin. Bu tür “kontinüum robotlar” sıkışık veya tehlikeli ortamlarda—çökmüş binalardan insan vücudunun içine kadar—çalışmak üzere tasarlanmış yumuşak, esnek makinelerdir. Bu makale, gövde uzunluğu değişirken ve engellerin etrafında güvenle dolaşırken bu robotları hassas şekilde yönlendirmek için yeni bir yöntem sunuyor ve bu gelecekçi teknolojiyi pratik kullanıma daha da yaklaştırıyor.
Esnek Robotları Kontrol Etmenin Zorluğu
Otomobil fabrikalarında gördüğünüz sert, eklemli kollardan farklı olarak, kontinüum robotlar kablolar veya tüplerle örülmüş bükülebilir omurga etrafında inşa edilir. Birçok yönde pürüzsüzce eğilebilir ve hatta uzayıp kısalabilirler; bu da onlara büyük erişim ve çeviklik sağlar. Ancak bu esneklik bir maliyet getirir: kabloları çektiğinizde robotun ucunun nasıl hareket edeceğini öngörmek karmaşıktır ve istenen uç konumundan doğru kablo ve şekil ayarlarını geriye doğru hesaplamak çok daha zordur. Aynı noktaya ulaşmanın genellikle birden fazla yolu vardır ve hareket son derece doğrusal olmayan davranış sergiler; bu da geleneksel adım-adım formüllerin uygulanmasını güçleştirir.
Hareket Planlamayı Akıllı Bir Aramaya Dönüştürmek
Bu zorluğun üstesinden gelmek için yazarlar robotun hareket planlamasını bir arama problemi olarak ele alıyor. Önce, robotun her bölümünün düzgün bir dairesel yay gibi büküldüğü yaygın olarak kullanılan bir geometrik yaklaşımı benimsiyorlar. Bu modelle, bükülme açıları, yönelimler ve bölüm uzunluklarına dair herhangi bir belirli seçim, robotun ucunun öngörülen bir konumuna götürür. Ana fikir, hedeflenen uzaydaki noktaya ucu mümkün olduğunca yakın düşürecek kombinasyonu bulmak üzere bu seçenekler üzerinde bilgisayarın arama yapmasına izin vermektir; bu arama, bölümlerin ne kadar bükülebileceği veya uzatılabileceğine dair fiziksel sınırlara tabidir.
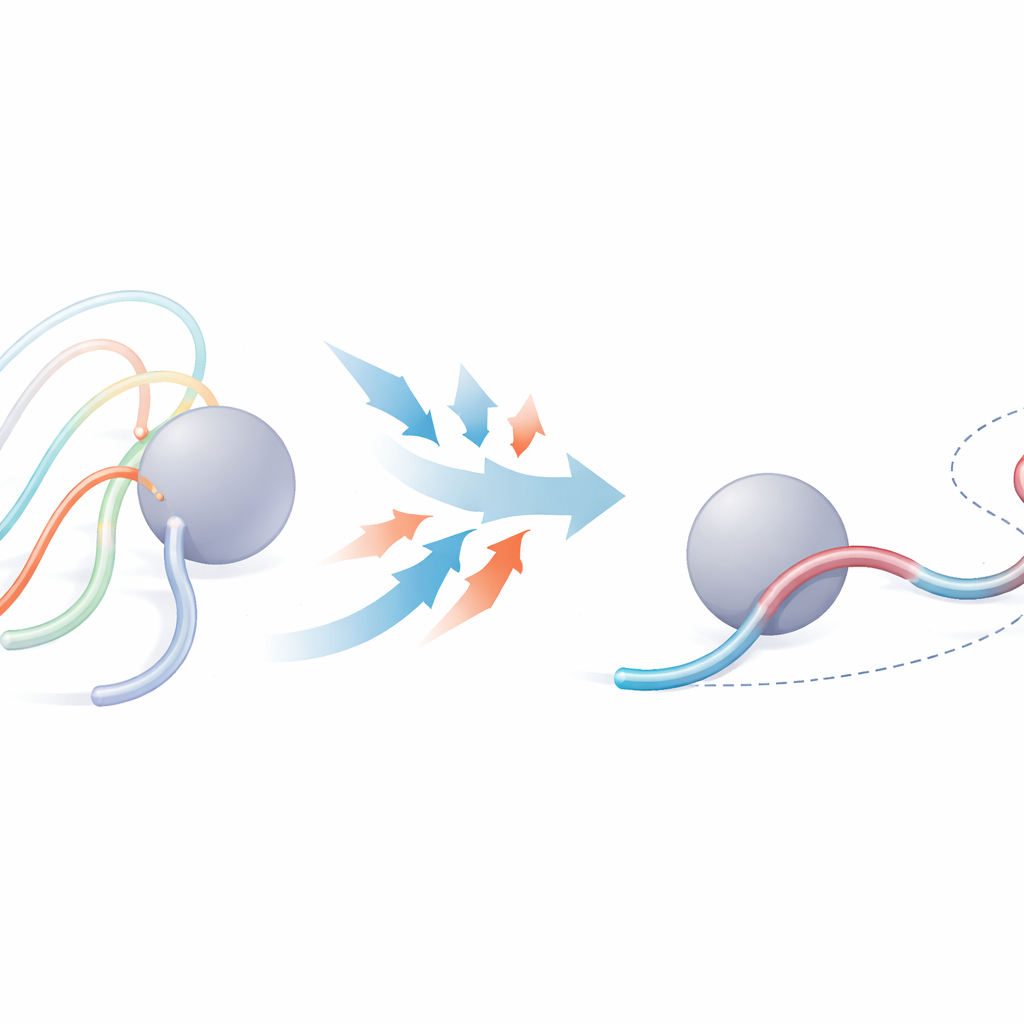
Sanal Bir Sınıftan Öğrenme
Bu yöntemin merkezindeki arama motoruna öğretme–öğrenme tabanlı optimizasyon denir. Bu yaklaşım, her biri robotun bükülme ve gerilme biçimlerinden birini temsil eden “öğrencilerden” oluşan bir sınıf hayal eder. Her turda en iyi öğrenci “öğretmen” rolünü üstlenerek diğerlerini daha iyi performansa doğru iterken, öğrenci çiftleri birbirlerinin farklarından da öğrenir. Birçok tur boyunca bu sanal sınıf, hedef noktayı çok yakından vuran bir konfigürasyona yakınsar. Noktadan noktaya hareketi pürüzsüz kılan basit bir hile vardır: robot bir yol boyunca ilerlerken, bir nokta için bulunan en iyi çözüm bir sonraki nokta için başlangıç tahmini olarak yeniden kullanılır; bu, robotun şeklinin ani sıçramalar yapmasını engeller.
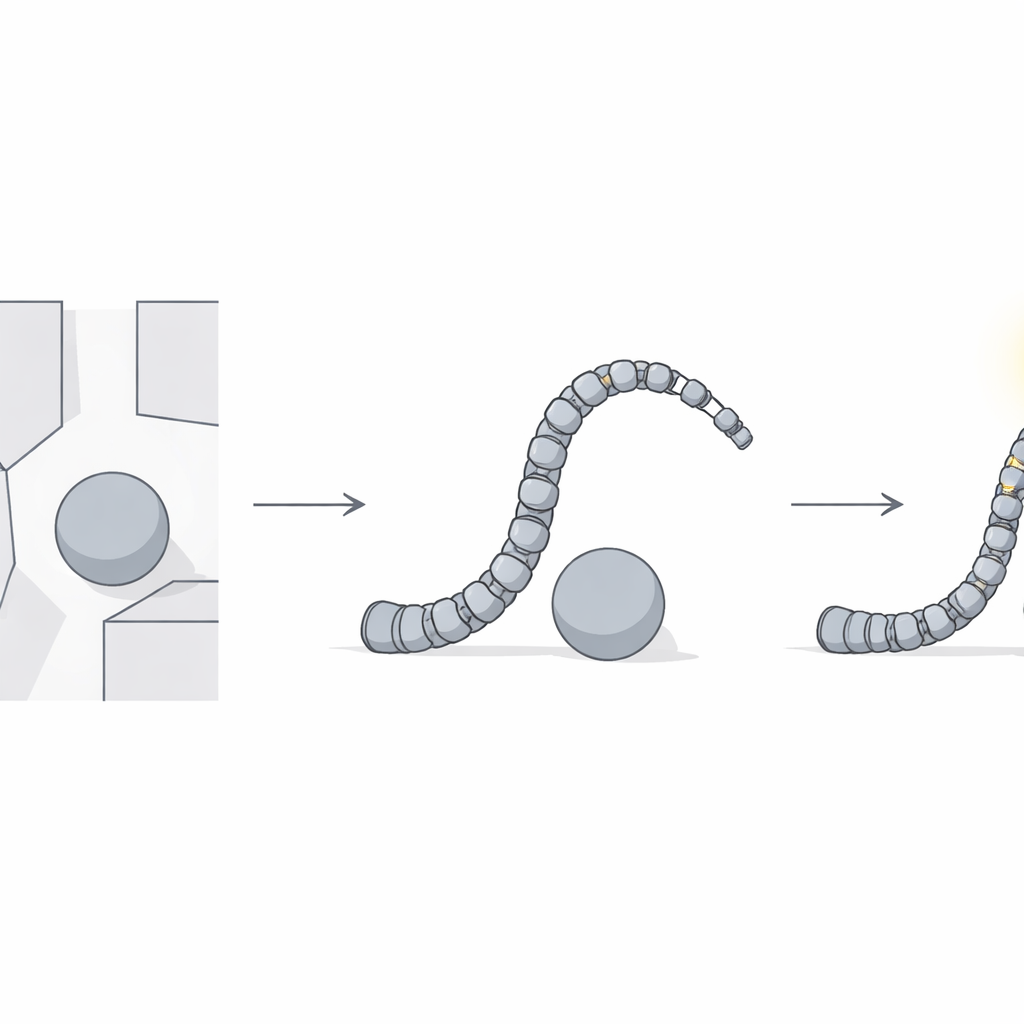
Engellerden Güvenli Bir Mesafe Tutmak
Dağınık ortamlarda çalışmak, robotun yakın nesnelerle sürtünmemesini gerektirir. Yazarlar yalnızca robotun merkez hattını kontrol etmek yerine her bölümü gerçek bir yarıçapa sahip kalınlaştırılmış “kapsül” olarak modelleyip, engelleri de kendi boyutları olan katı şekiller olarak ele alırlar. Arama sırasında bir engelle çarpışacak herhangi bir aday şekil ağır şekilde cezalandırılır; bu da onun iyi bir çözüm olarak seçilme olasılığını çok düşük kılar. Bilgisayar testlerinde robot, sabit bir engelin etrafında zarifçe bükülürken hem düz hem de dairesel yolları başarıyla izledi ve uygun bir emniyet boşluğunu korudu.
Yöntemi Teste Sokmak
Takım, sınıf esinli aramalarını mühendislikte sıklıkla kullanılan üç popüler optimizasyon yöntemiyle karşılaştırdı. Birçok tekrarlı denemede yaklaşımları, rekabet eden yöntemlerin gerektirdiği elle ayarlanmış kontrol düğmelerine ihtiyaç duymadan tutarlı biçimde son derece hassas çözümler buldu. Ayrıca tekniği üç esnek bölümden oluşan daha karmaşık robotlara kadar zorlayarak tasarımlar büyüdükçe ölçeklenebildiğini gösterdiler. Son olarak, yöntemi hava basıncıyla çalışan gerçek bir hortum benzeri robot üzerinde test ettiler. Robotun hareketini izleyen sensörlerden alınan ölçümleri kullanarak algoritmalarını çevrimdışı çalıştırdılar ve iç kabloların nasıl hareket etmesi gerektiğini tahmin ettiler; tahmin edilen ve ölçülen kablo uzunluklarının milimetre düzeyinde yakınlıkta olduğunu buldular.
Geleceğin Robotları İçin Anlamı
Günlük terimlerle bu çalışma, esnek, hortum benzeri bir robotun, uzanmak, kıvrılmak ve yol boyunca engellerden kaçınmak zorunda kalsa bile sert bir endüstriyel kola neredeyse aynı güvenilirlikle rehberlik edilebileceğini gösteriyor. Yönlendirme sorununu yönlendirilmiş bir aramaya çevirerek ve güvenlik boşluklarını doğrudan hedef fonksiyonuna dahil ederek yazarlar, hem simülasyonlarda hem de donanımda işe yarayan pratik bir reçete sunuyor. Bu, makinelerin içine, afet bölgelerine veya hatta insan vücuduna güvenle girip hassas görevleri yerine getirirken kalabalık ortamlardan kıvrılarak geçebilen geleceğin robotları için zemin hazırlıyor.
Atıf: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Anahtar kelimeler: kontinüum robotlar, yumuşak robotik, engel kaçınma, hareket planlama, optimizasyon algoritmaları