Clear Sky Science · it
Cinematica inversa attenta agli ostacoli per robot continui a lunghezza variabile tramite ottimizzazione basata su insegnamento–apprendimento con validazione sperimentale
Robot che si muovono come le proboscidi degli elefanti
Immaginate un braccio robotico che può avvolgersi, torcersi e insinuarsi tra le macerie come la proboscide di un elefante che si infila tra i rami di un albero. Questi «robot continui» sono macchine morbide e flessibili progettate per operare in spazi ristretti o pericolosi, dai edifici crollati all’interno del corpo umano. Questo articolo presenta un nuovo modo per governare con precisione questi robot, anche quando la loro lunghezza cambia e devono aggirare in sicurezza gli ostacoli, avvicinando questa tecnologia futuristica a un impiego pratico.
Perché i robot flessibili sono difficili da controllare
A differenza dei bracci rigidi e articolati che si vedono nelle fabbriche, i robot continui sono costruiti attorno a spinale flessibili attraversate da cavi o tubi. Possono curvarsi in modo fluido in molte direzioni e perfino estendersi o contrarsi, il che conferisce loro grande portata e agilità. Ma questa flessibilità ha un prezzo: prevedere come si sposterà la punta del robot quando si tendono i cavi è complicato, e risalire da una posizione desiderata della punta alle impostazioni corrette di cavi e forma è ancora più difficile. Spesso esistono molteplici modi per raggiungere lo stesso punto e il moto è altamente non lineare, rendendo difficili l’applicazione di formule tradizionali passo dopo passo.
Trasformare la pianificazione del moto in una ricerca intelligente
Per affrontare questa sfida, gli autori trattano la pianificazione del moto come un problema di ricerca. Adottano innanzitutto un’approssimazione geometrica largamente utilizzata per cui ogni sezione del robot si piega come un arco circolare liscio. Con questo modello, una scelta specifica di angoli di curvatura, orientamenti e lunghezze delle sezioni determina una posizione prevista della punta del robot. L’idea chiave è quindi lasciare che un computer cerchi fra queste scelte per trovare la combinazione che porta la punta il più vicino possibile a un punto desiderato nello spazio, soggetta ai limiti fisici su quanto le sezioni possono piegarsi o estendersi.
Apprendere da un’aula virtuale
Il motore di ricerca al centro di questo metodo si chiama ottimizzazione basata su insegnamento–apprendimento. Immagina una classe di «studenti», ciascuno rappresentante una soluzione candidata per come il robot può piegarsi ed estendersi. A ogni iterazione, lo studente migliore agisce da «insegnante», spingendo gli altri verso prestazioni migliori, mentre coppie di studenti imparano anche dalle rispettive differenze. Dopo molte iterazioni, questa classe virtuale converge verso una configurazione che colpisce molto da vicino il punto obiettivo. Un trucco semplice rende il moto da punto a punto fluido: quando il robot si muove lungo un percorso, la soluzione migliore trovata per un punto viene riutilizzata come stima iniziale per il successivo, aiutando a evitare salti improvvisi nella forma.
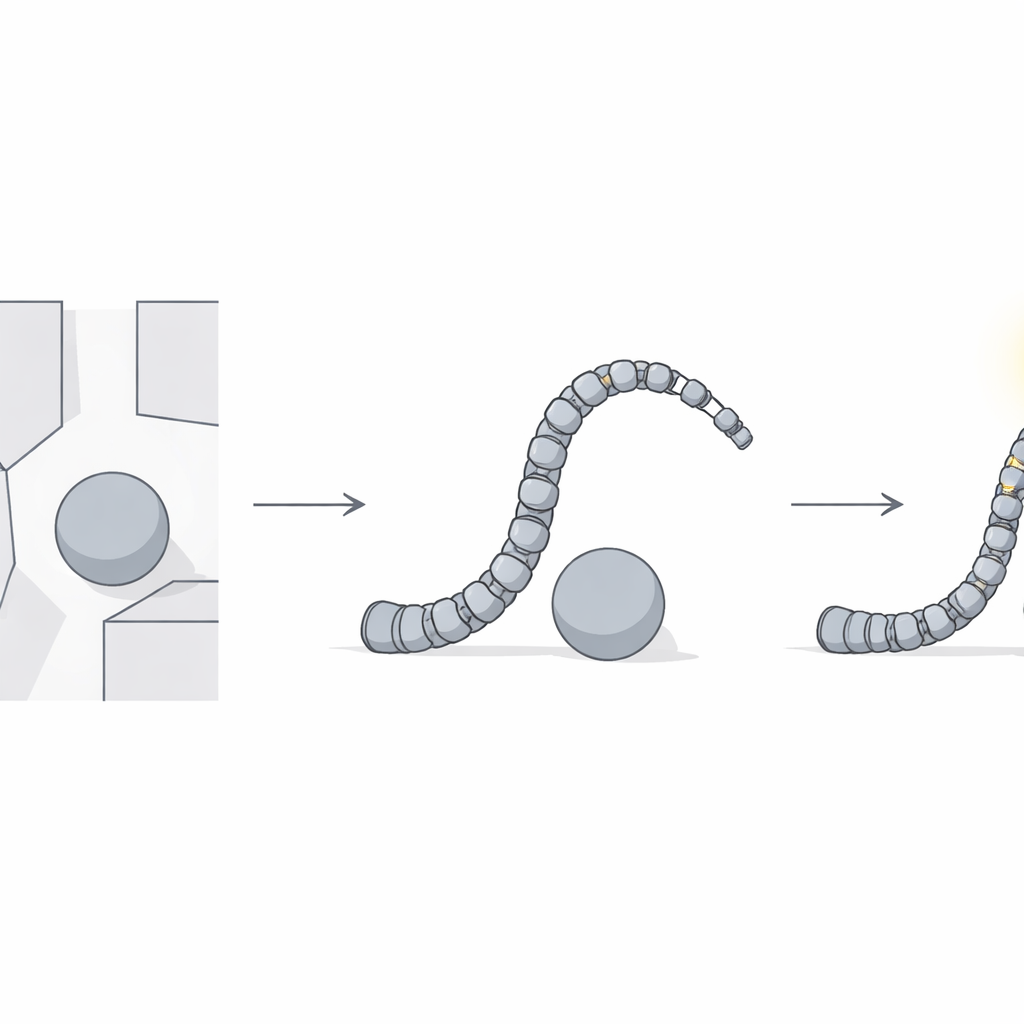
Mantenere una distanza di sicurezza dagli ostacoli
Operare in spazi ingombri significa che il robot non deve sfregare contro oggetti vicini. Invece di verificare solo la linea centrale del corpo del robot, gli autori modellano ogni sezione come una «capsula» ispessita con un raggio reale e trattano gli ostacoli come forme solide con le proprie dimensioni. Durante la ricerca, qualsiasi forma candidata che colliderebbe con un ostacolo viene fortemente penalizzata, rendendo molto improbabile che venga scelta come buona soluzione. Nei test al computer, il robot ha seguito con successo sia percorsi rettilinei sia circolari mentre si piegava elegantemente attorno a un’ostruzione fissa, mantenendo al contempo un appropriato margine di sicurezza.
Mettere il metodo alla prova
Il team ha confrontato la loro ricerca ispirata alla classe con altre tre popolari tecniche di ottimizzazione spesso usate in ingegneria. In numerose prove ripetute, il loro approccio ha costantemente trovato soluzioni estremamente precise senza richiedere alcuna regolazione manuale dei parametri, cosa invece necessaria per i metodi concorrenti. Hanno inoltre spinto la tecnica su robot più complessi con tre sezioni flessibili, dimostrando che scala con la crescita delle capacità progettuali. Infine, hanno testato il metodo su un robot reale simile a una proboscide azionato a pressione d’aria. Utilizzando misure provenienti da sensori che tracciavano il moto del robot, hanno eseguito l’algoritmo offline per predire come i cavi interni avrebbero dovuto muoversi, riscontrando che le lunghezze dei cavi previste e misurate corrispondevano da vicino, entro pochi millimetri.
Cosa significa per i robot del futuro
In termini pratici, lo studio mostra che un robot flessibile a forma di proboscide può essere guidato quasi con la stessa affidabilità di un braccio industriale rigido, anche quando deve estendersi, avvolgersi e schivare ostacoli lungo il percorso. Trasformando il problema di controllo in una ricerca guidata e incorporando margini di sicurezza direttamente nell’obiettivo, gli autori forniscono una ricetta pratica che funziona sia nelle simulazioni sia sull’hardware. Questo apre la strada a futuri robot in grado di insinuarsi in sicurezza attraverso ambienti affollati—all’interno di macchine, zone di disastro o persino nel corpo umano—pur muovendosi con la precisione richiesta da compiti esigenti.
Citazione: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Parole chiave: robot continui, robotica morbida, evitare ostacoli, pianificazione del moto, algoritmi di ottimizzazione