Clear Sky Science · pl
Świadomość przeszkód w odwrotnej kinematyce robotów kontinuum o zmiennej długości za pomocą optymalizacji opartej na nauczaniu–uczeniu się z walidacją eksperymentalną
Roboty poruszające się jak słoniowe trąby
Wyobraź sobie ramię robota, które potrafi się zwijać, skręcać i przeciskać przez gruz tak, jak trąba słonia wplata się między gałęzie drzewa. Takie „roboty kontinuum” to miękkie, elastyczne maszyny zaprojektowane do pracy w wąskich lub niebezpiecznych miejscach — od zawalonych budynków po wnętrze ludzkiego ciała. W artykule przedstawiono nowy sposób precyzyjnego sterowania tymi robotami, nawet gdy zmieniają długość swojego ciała i omijają przeszkody, przybliżając tę futurystyczną technologię do praktycznego zastosowania.
Dlaczego elastyczne roboty trudno kontrolować
W przeciwieństwie do sztywnych, stawowych ramion znanych z fabryk samochodów, roboty kontinuum opierają się na giętkich rdzeniach przewleczonych linkami lub rurkami. Mogą wyginać się płynnie w wielu kierunkach, a nawet wydłużać lub skracać, co daje im dużą zasięg i zwinność. Jednak ta elastyczność ma swoją cenę: przewidzenie, jak przesunie się końcówka robota po pociągnięciu za linki, jest skomplikowane, a odwrócenie tego procesu — znalezienie ustawień link i kształtu prowadzących do żądanej pozycji końcówki — jest jeszcze trudniejsze. Często istnieje wiele sposobów osiągnięcia tego samego punktu, a ruch jest silnie nieliniowy, co utrudnia stosowanie tradycyjnych krokowych wzorów.
Przekształcenie planowania ruchu w inteligentne przeszukiwanie
Aby rozwiązać ten problem, autorzy traktują planowanie ruchu robota jako problem przeszukiwania. Najpierw przyjmują powszechnie stosowane przybliżenie geometryczne, zgodnie z którym każda sekcja robota wygina się jak gładka łukowa krzywizna kołowa. W tym modelu dowolny wybór kątów zgięcia, orientacji i długości sekcji prowadzi do przewidywanej pozycji końcówki. Kluczowy pomysł polega na tym, by pozwolić komputerowi przeszukać przestrzeń tych wyborów, aby znaleźć kombinację, która umieści końcówkę jak najbliżej żądanego punktu w przestrzeni, z uwzględnieniem fizycznych ograniczeń, jak bardzo sekcje mogą się wyginać lub rozszerzać.
Nauka z wirtualnej klasy
Silnikiem tego podejścia jest algorytm optymalizacyjny zwany optymalizacją opartą na nauczaniu–uczeniu się. Wyobraża on sobie klasę „uczniów”, z których każdy reprezentuje jedną kandydacką konfigurację zgięć i rozciągnięć robota. W każdej rundzie najlepszy uczeń pełni rolę „nauczyciela”, popychając innych w stronę lepszej wydajności, podczas gdy pary uczniów uczą się od różnic między sobą. Po wielu rundach ta wirtualna klasa zbiega do konfiguracji, która bardzo dokładnie trafia w cel. Prostą sztuczką osiąga się płynność ruchu między punktami: gdy robot porusza się po ścieżce, najlepsze rozwiązanie znalezione dla jednego punktu jest używane jako punkt startowy dla następnego, co pomaga uniknąć nagłych skoków w kształcie.
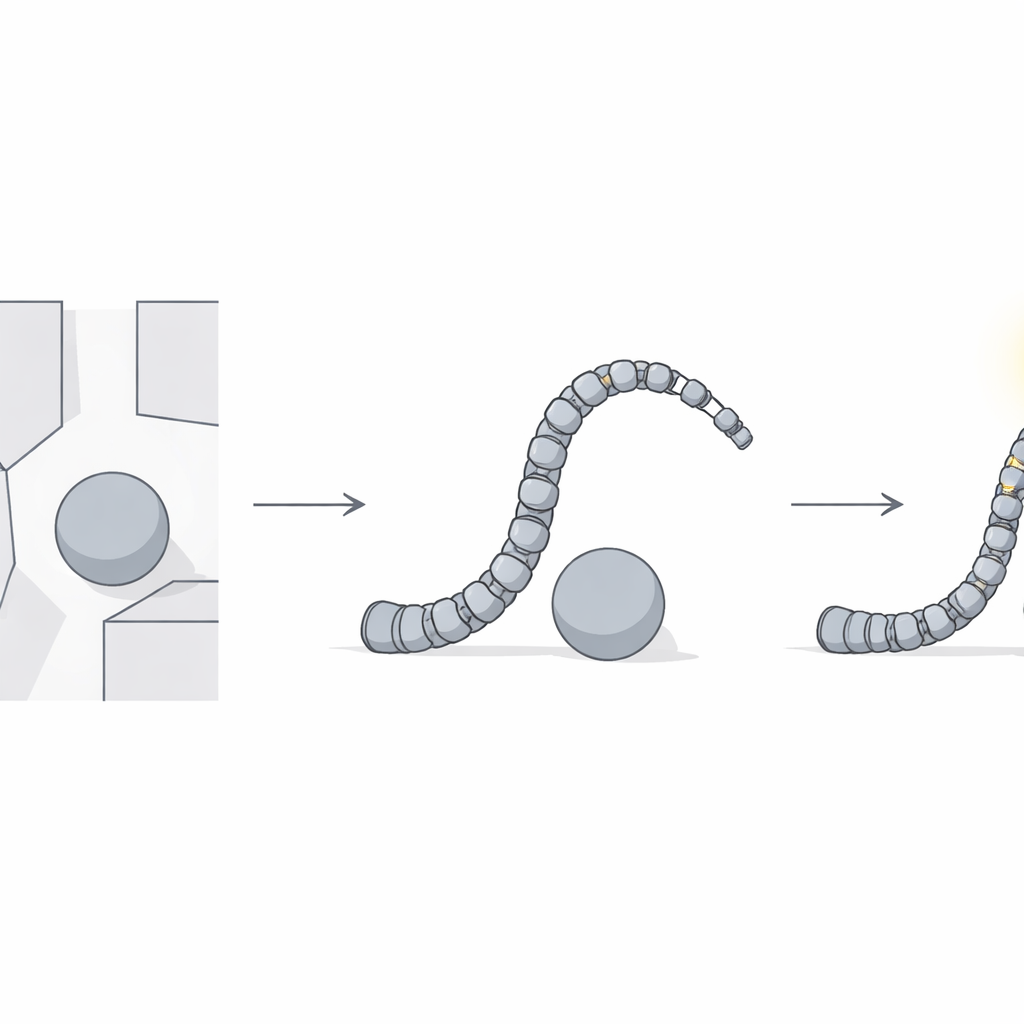
Utrzymanie bezpiecznej odległości od przeszkód
Praca w zagraconych przestrzeniach oznacza, że robot nie może ocierać się o pobliskie obiekty. Zamiast sprawdzać jedynie linię środkową ciała, autorzy modelują każdą sekcję jako pogrubioną „kapsułę” o rzeczywistym promieniu, a przeszkody traktują jako bryły o własnych rozmiarach. Podczas przeszukiwania każda kandydacka konfiguracja, która spowodowałaby kolizję z przeszkodą, jest mocno karana, co czyni jej wybór mało prawdopodobnym. W testach komputerowych robot pomyślnie podążał zarówno prostymi, jak i okrągłymi ścieżkami, łagodnie wyginając się wokół stałej przeszkody i zachowując odpowiedni margines bezpieczeństwa.
Weryfikacja metody
Zespół porównał swoje podejście inspirowane klasą z trzema innymi popularnymi metodami optymalizacji często stosowanymi w inżynierii. W wielu powtarzanych próbach ich metoda konsekwentnie znajdowała niezwykle precyzyjne rozwiązania bez potrzeby ręcznego dostrajania parametrów sterujących, które wymagają konkurencyjne metody. Przetestowali też technikę na bardziej złożonych robotach z trzema elastycznymi sekcjami, pokazując, że skaluje się ona wraz z rosnącymi możliwościami konstrukcji. Na koniec sprawdzili metodę na rzeczywistym robocie przypominającym trąbę napędzanym ciśnieniem powietrza. Korzystając z pomiarów z czujników śledzących ruch robota, uruchomili algorytm offline, aby przewidzieć, jak powinny poruszać się wewnętrzne linki, i stwierdzili, że przewidywane i zmierzone długości linek zgadzały się blisko, w granicach kilku milimetrów.
Co to oznacza dla przyszłych robotów
Mówiąc prościej, badanie pokazuje, że elastyczny robot przypominający trąbkę może być kierowany niemal tak niezawodnie jak sztywne ramię przemysłowe, nawet gdy musi rozciągać się, zwijać i omijać przeszkody po drodze. Przekształcając problem sterowania w prowadzone przeszukiwanie i wbudowując marginesy bezpieczeństwa bezpośrednio w funkcję celu, autorzy dostarczają praktycznego przepisu, który działa zarówno w symulacjach, jak i w sprzęcie. To tworzy podstawy dla przyszłych robotów, które bezpiecznie przecisną się przez zatłoczone środowiska — wewnątrz maszyn, strefach katastrof, a nawet w organizmie człowieka — zachowując jednocześnie precyzję wymaganą przez wymagające zadania.
Cytowanie: Ghoul, A., Sattar, A.M., Adoul, M.A. et al. Obstacle-aware inverse kinematics of variable-length continuum robots via teaching–learning-based optimization with experimental validation. Sci Rep 16, 11227 (2026). https://doi.org/10.1038/s41598-026-46132-6
Słowa kluczowe: roboty kontinuum, robotyka miękka, unikanie przeszkód, planowanie ruchu, algorytmy optymalizacyjne